yolov8源码解读Detect层
- Detect层解读
- 网络各层解读及detect层后的处理
关于网络的backbone,head,以及detect层后处理,可以参考文章结尾博主的文章。
Detect层解读
先贴一下全部代码,下面一一解读。
class Detect(nn.Module):
"""YOLOv8 Detect head for detection models."""
dynamic = False # force grid reconstruction
export = False # export mode
shape = None
anchors = torch.empty(0) # init
strides = torch.empty(0) # init
def __init__(self, nc=80, ch=()):
"""Initializes the YOLOv8 detection layer with specified number of classes and channels."""
super().__init__()
self.nc = nc # number of classes
self.nl = len(ch) # number of detection layers
self.reg_max = 16 # DFL channels (ch[0] // 16 to scale 4/8/12/16/20 for n/s/m/l/x)
self.no = nc + self.reg_max * 4 # number of outputs per anchor
self.stride = torch.zeros(self.nl) # strides computed during build
c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], min(self.nc, 100)) # channels
self.cv2 = nn.ModuleList(
nn.Sequential(Conv(x, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for x in ch)
self.cv3 = nn.ModuleList(nn.Sequential(Conv(x, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for x in ch)
self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()
def forward(self, x):
"""Concatenates and returns predicted bounding boxes and class probabilities."""
shape = x[0].shape # BCHW
# print(">>>>", x[0].shape)
# print(">>>>", x[1].shape)
# print(">>>>", x[2].shape)
for i in range(self.nl):
x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1)
if self.training:
return x
elif self.dynamic or self.shape != shape:
self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))
self.shape = shape
x_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)
if self.export and self.format in ('saved_model', 'pb', 'tflite', 'edgetpu', 'tfjs'): # avoid TF FlexSplitV ops
box = x_cat[:, :self.reg_max * 4]
cls = x_cat[:, self.reg_max * 4:]
else:
box, cls = x_cat.split((self.reg_max * 4, self.nc), 1)
dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.strides
if self.export and self.format in ('tflite', 'edgetpu'):
# Normalize xywh with image size to mitigate quantization error of TFLite integer models as done in YOLOv5:
# https://github.com/ultralytics/yolov5/blob/0c8de3fca4a702f8ff5c435e67f378d1fce70243/models/tf.py#L307-L309
# See this PR for details: https://github.com/ultralytics/ultralytics/pull/1695
img_h = shape[2] * self.stride[0]
img_w = shape[3] * self.stride[0]
img_size = torch.tensor([img_w, img_h, img_w, img_h], device=dbox.device).reshape(1, 4, 1)
dbox /= img_size
# print(cls.shape)
y = torch.cat((dbox, cls.sigmoid()), 1)
# print(y.shape)
return y if self.export else (y, x)
dynamic = False #这个属性指示网格(通常是特征图上的锚框网格)是否需要动态地重建
export = False #这个属性用于指示模型是否处于导出模式。
shape = None # 用于存储输入图像或特征图的尺寸。
anchors = torch.empty(0) # 创建了一个空的PyTorch张量
strides = torch.empty(0)
步长(strides)是卷积神经网络中特征图相对于输入图像的缩小比例。
例如,如果步长是32,那么一个32x32像素的区域在特征图上就对应一个单元。
和anchors一样,这里的torch.empty(0)表示步长尚未初始化。
def __init__(self, nc=80, ch=()):
"""Initializes the YOLOv8 detection layer with specified number of classes and channels."""
super().__init__()
self.nc = nc # number of classes
self.nl = len(ch) # number of detection layers
self.reg_max = 16 # DFL channels (ch[0] // 16 to scale 4/8/12/16/20 for n/s/m/l/x)
self.no = nc + self.reg_max * 4 # number of outputs per anchor
self.stride = torch.zeros(self.nl) # strides computed during build
c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], min(self.nc, 100)) # channels
self.cv2 = nn.ModuleList(
nn.Sequential(Conv(x, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for x in ch)
self.cv3 = nn.ModuleList(nn.Sequential(Conv(x, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for x in ch)
self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()
nc:类别数
nl:检测层的数量,目标检测中为3。
ch:传入的图片通道尺寸,在yolov8n,图片大小为640*640时。这里的ch为(256,128,64)
no:两个卷积再拼接后输出通道数,为4×reg_max+nc
c2,c3:计算卷积层的通道数。
cv2,cv3:定义的卷积操作,以输出有关类别和选框的特征图。
dfl:通过将分布式的概率分布转化为单一的预测值
class DFL(nn.Module):
def __init__(self, c1=16):
"""Initialize a convolutional layer with a given number of input channels."""
super().__init__()
self.conv = nn.Conv2d(c1, 1, 1, bias=False).requires_grad_(False)
x = torch.arange(c1, dtype=torch.float)
self.conv.weight.data[:] = nn.Parameter(x.view(1, c1, 1, 1))
self.c1 = c1
def forward(self, x):
"""Applies a transformer layer on input tensor 'x' and returns a tensor."""
b, c, a = x.shape # batch, channels, anchors
return self.conv(x.view(b, 4, self.c1, a).transpose(2, 1).softmax(1)).view(b, 4, a)
self.conv:创建了一个输入通道为16,输出为1,没有偏置项,不需要进行梯度更新的卷积层。
这样的权重设置实际上模拟了一个积分过程,将卷积操作变成了加权求和的形式。
x:1到15的整数。
self.conv.weight.data[:] = nn.Parameter(x.view(1, c1, 1, 1)):
这里使用nn.Parameter将重塑后的张量设置为模型的参数,并且参数不会被更新。
假设前向传播中,x的形状为(1, 64, 8400),下面解释下forword中的变化。
1,x.view(b, 4, self.c1, a): 这个操作是对x的形状进行重塑。self.c1是16(因为输入通道数是64,即4*self.c1),那么a是8400(代表了所有锚点的数量)。b是批次大小,这里为1。所以x.view(b, 4, self.c1, a)将x从(1, 64, 8400)重塑为(1, 4, 16, 8400)。在这个形状中,我们得到了每个锚点的每个坐标轴(x, y, 宽度, 高度)上的16个预测值(可能代表某种概率分布)。
2,transpose(2, 1): 这个操作交换第二维和第三维。在应用transpose之后,张量的形状变为(1, 16, 4, 8400)。这样做的目的是让每组概率分布的16个预测值连续地排列在一起,为后面的softmax运算做准备。
3,softmax(1): softmax函数应用于第一维(现在是16个预测值的这一维)。softmax确保了这16个值之和为1,转换为一个有效的概率分布,表示每个预测值的可能性。
4,self.conv(…): 这个操作将配置好的卷积层应用在进行了softmax操作的张量上。由于卷积层的权重已被设置为从0到15的整数,并且不更新权重(不进行梯度下降优化),这个步骤实际上是在计算期望值。卷积层将每个离散的概率值乘以其相应的索引(也就是权重),然后对结果进行求和,得到该坐标的预测值。
5,view(b, 4, a): 最后一步是将张量的形状从卷积操作后的(1, 1, 4, 8400)转换回(1, 4, 8400)。这样确保了最终的输出张量与每个坐标轴的预测值(x, y, 宽度, 高度)和所有锚点的数量对齐。
总的来说,dfl层就是对预测的坐标求加权期望值。将(1,64,8400)先变为(1,16,4,8400),然后对这16个通道求加权期望,变为(1,4,8400)即这8400个锚点中的每一个锚点,x,y,width,hight的加权平均值。
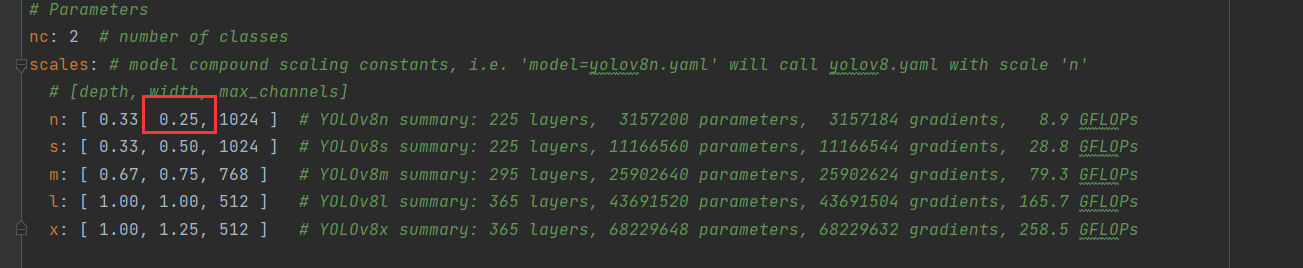
接下来是前向传播的过程。打印传入的x形状,发现通道数是64,128,256。
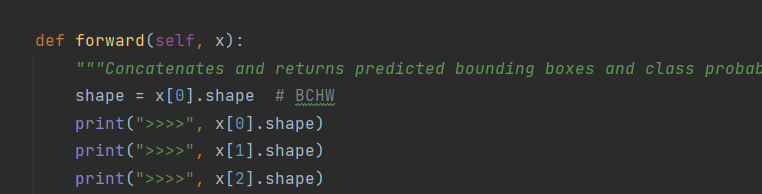

原因:Detect层接受15,18,21层的输入。原本通道数是1024,512,256。但是yolov8n还需要乘0.25。
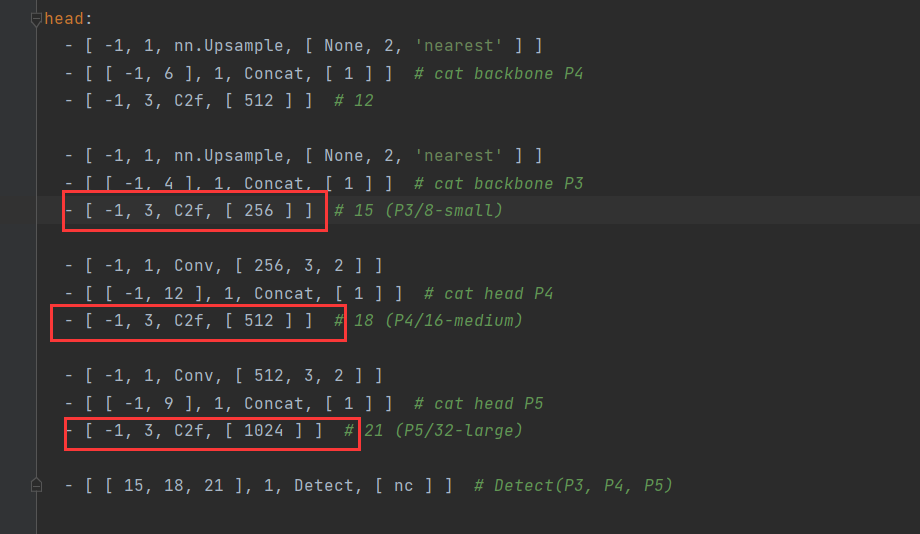
经过cv2,通道数变为64,经过cv3通道数变为nc,我这里nc为2(二分类)。在经过cat拼接,在通道维度上拼接,所以x[i]的通道数变为66。
如果处于训练模式,就直接返回x。
否则执行下面的代码,将特征图列表x(1×66×40×40,1×66×80×80,1×66×20×20)传递给make_anchors()函数。make_anchors函数用于生成锚点(anchors),它通常用在目标检测网络中。每个锚点代表了特征图上的一个点,可以用来预测相对于该点的边界框。strides是这些特征图相对于原始图像的下采样步长。简单来说,生成了8400个锚点(40×40+80×80+20×20),变量为anchors,形状为1×2×8400)。同时生成了8400个步长,变量为strides,形状为1×8400。参数0.5表示每个锚点处于每个像素块的中央。
if self.training:
return x
elif self.dynamic or self.shape != shape:
self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))
self.shape = shape
将xi按照2维度进行拼接,xi分别为1×66×40×40,1×66×80×80,1×66×20×20。拼接后的x_cat为1×66×8400
x_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)
这段代码就是把x_cat进行拆分。box形状为1×64×8400,包含每个边界框的回归参数。cls形状为1×2×8400,会包含类别预测,2是因为我这里类别为2。
if self.export and self.format in ('saved_model', 'pb', 'tflite', 'edgetpu', 'tfjs'): # avoid TF FlexSplitV ops
box = x_cat[:, :self.reg_max * 4]
cls = x_cat[:, self.reg_max * 4:]
else:
box, cls = x_cat.split((self.reg_max * 4, self.nc), 1)
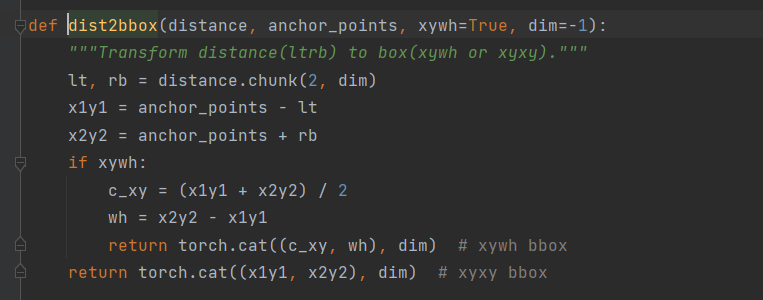
dfl层就是对预测的坐标求加权期望值。将(1,64,8400)先变为(1,16,4,8400),然后对这16个通道求加权期望,变为(1,4,8400)即这8400个锚点中的每一个锚点,x1,y1,x2,y2的加权平均值。dist2bbox()函数的作用是将锚点x1,y1,x2,y2转换为x,y,width,hight的形式。最后在乘以步长,还原到原图的大小比例。
dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.strides
此代码片段的作用是在模型导出为 Tensorflow Lite (tflite) 或 Edge TPU 兼容格式时,对预测框 (dbox) 进行归一化处理。
if self.export and self.format in ('tflite', 'edgetpu'):
# Normalize xywh with image size to mitigate quantization error of TFLite integer models as done in YOLOv5:
# https://github.com/ultralytics/yolov5/blob/0c8de3fca4a702f8ff5c435e67f378d1fce70243/models/tf.py#L307-L309
# See this PR for details: https://github.com/ultralytics/ultralytics/pull/1695
img_h = shape[2] * self.stride[0]
img_w = shape[3] * self.stride[0]
img_size = torch.tensor([img_w, img_h, img_w, img_h], device=dbox.device).reshape(1, 4, 1)
dbox /= img_size
此时y的形状为1×66×8400。代表有8400个锚点,每个锚点包含坐标框的x,y,width,hight,以及类别得分信息。
y = torch.cat((dbox, cls.sigmoid()), 1)
返回值,至此detect层结束。完整的预测,后续还需要进行一些处理。如进行非极大抑制,对这8400个锚点进行筛选
return y if self.export else (y, x)
另外,最后的bias_init()函数用于初始化一个目标检测模型中的Detect层的偏置。确保在训练开始时偏置值是基于合理假设的。这种方法的目标是为模型提供一个好的起点,并有助于加速训练过程中的收敛。
def bias_init(self):
"""Initialize Detect() biases, WARNING: requires stride availability."""
m = self # self.model[-1] # Detect() module
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1
# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # nominal class frequency
for a, b, s in zip(m.cv2, m.cv3, m.stride): # from
a[-1].bias.data[:] = 1.0 # box
b[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)
网络各层解读及detect层后的处理
关于backbone,head层,以及detect层参考下面博主的文章,讲的非常好。
链接: Yolov 8源码超详细逐行解读+ 网络结构细讲(自我用的小白笔记)
链接: 最细致讲解yolov8模型推理完整代码–(前处理,后处理)