1. 项目介绍
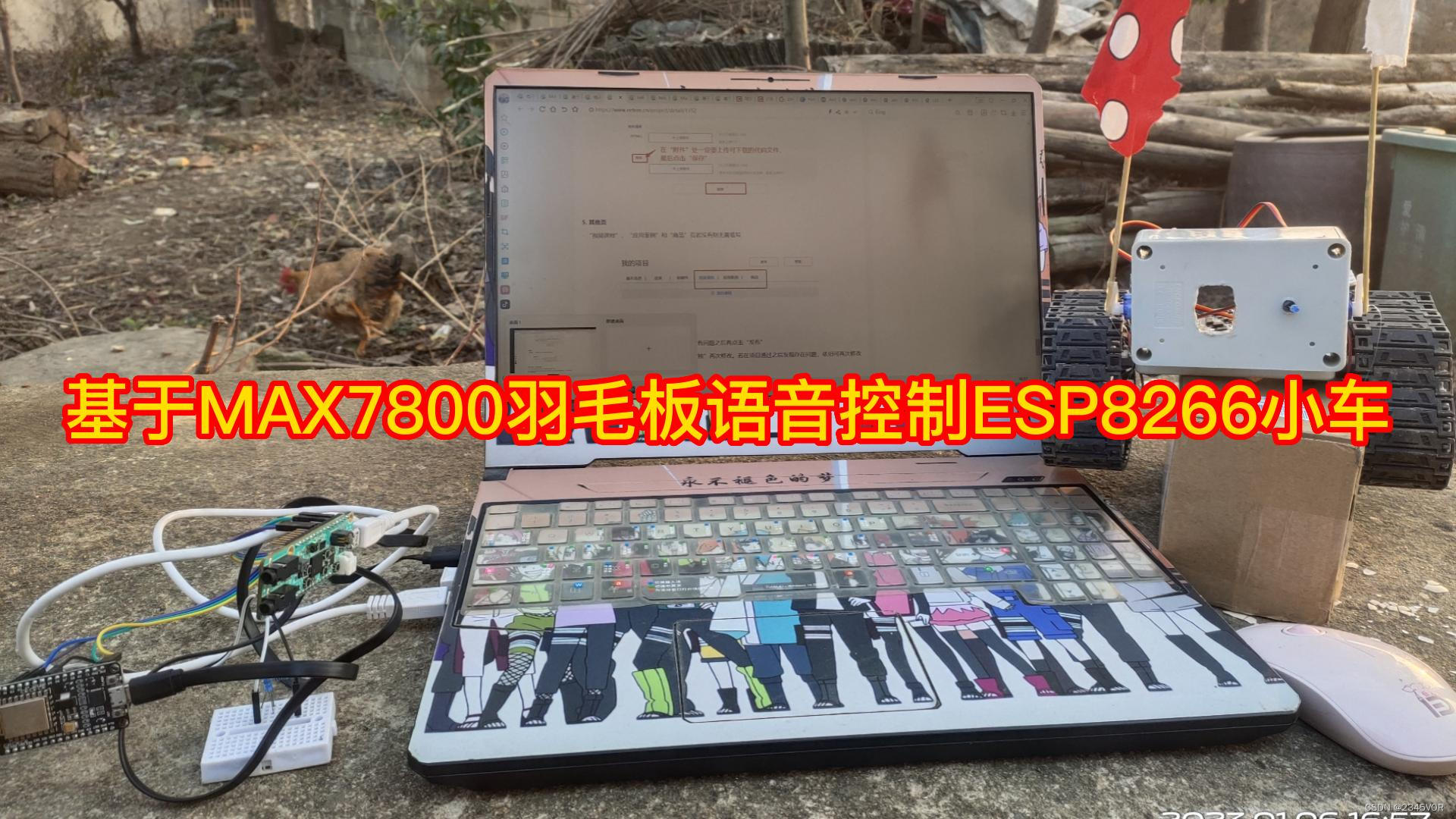
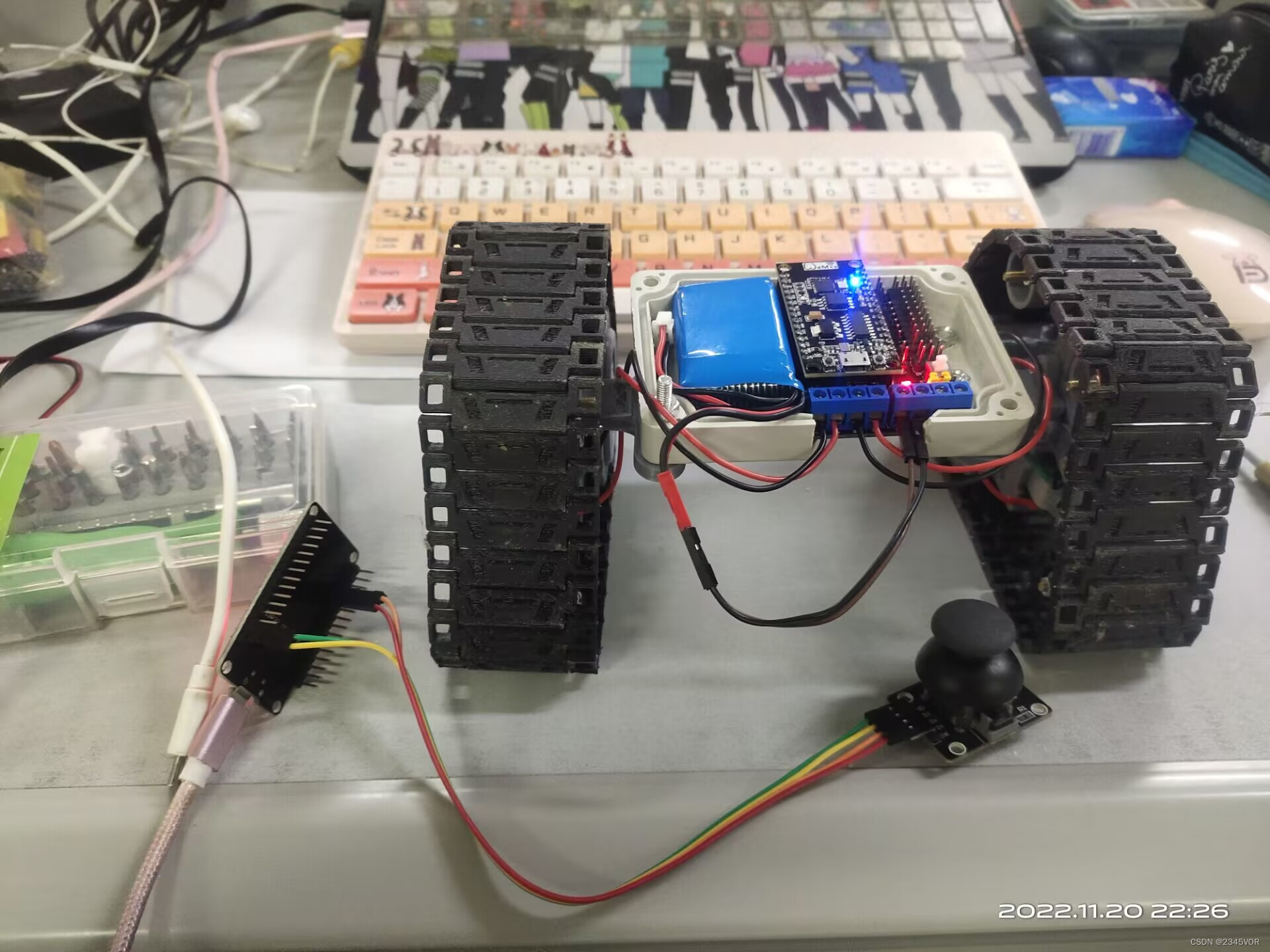
基于MAX7800羽毛板语音控制ESP8266小车
采用现成的KWS20关键词,['up', 'down', 'left', 'right', 'stop', 'go', 'yes', 'no', 'on', 'off', 'one', 'two', 'three', 'four', 'five', 'six', 'seven', 'eight', 'nine', 'zero'],进行语音关键字识别远程控制小车。
2. 项目设计思路
搭建环境《——》学习基本例程《——》熟悉基本编译下载调试功能《——》重点解析参考目标案例《——》各个模块功能调试《——》整体联调维护相关功能《——》演示总结
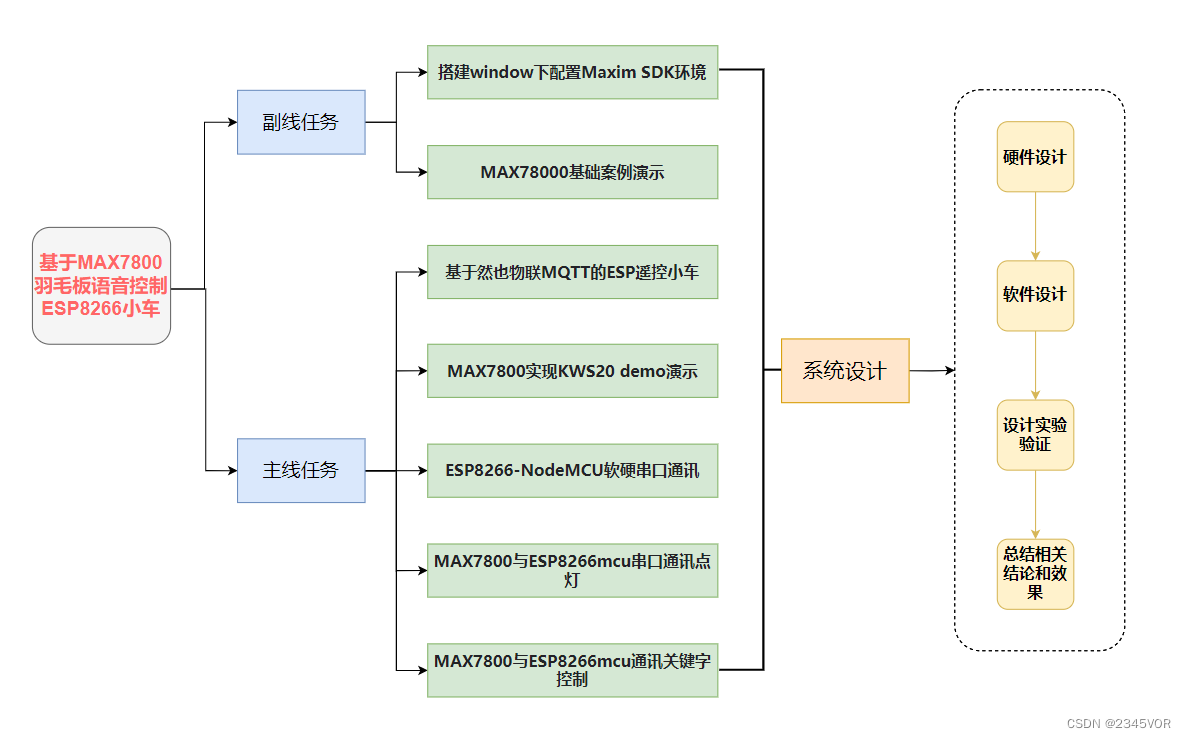
系统设计图
我们开始主线任务和副线任务吧
3. 主线任务
主线任务围绕语音关键字识别远程控制三部分展开!🥳🥳🥳
3.1 远程遥控ESP8266小车——主线1
一步一个脚印,MQTT的ESP遥控小车从原理到实现,涉及硬件电路,程序设计,然后也探讨了个人见解,希望把两个归中传感器数值传递过去,减少实验步骤,提高速成感和成就感!🌼🌻🎏🛹🏃♂️
见网址:基于然也物联MQTT的ESP遥控小车
见项目进度主线1
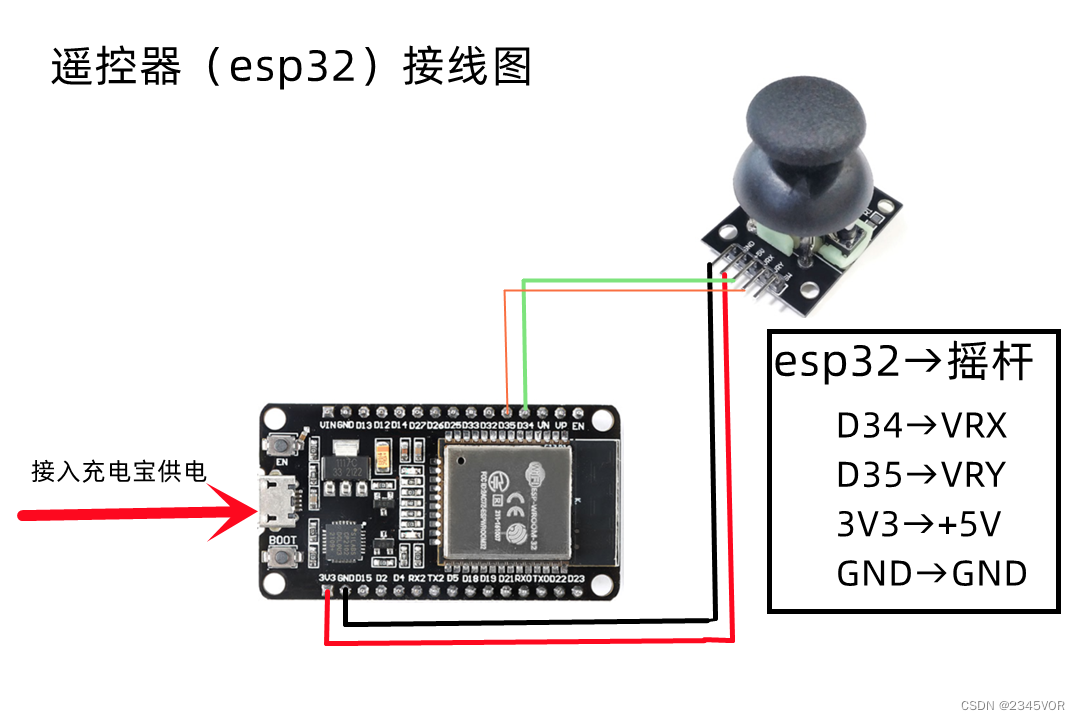
- 发射机
- 接收机
- 最后效果
3.2 MAX7800实现KWS20 demo演示——主线2
Keyword Spotting Demo 软件演示了如何使用MAX78000 EVKIT 识别大量关键字。
KWS20 演示软件使用第二版 Google 语音命令数据集此演示使用了完整数据集中的以下 20 个关键字子集:
[‘up’, ‘down’, ‘left’, ‘right’, ‘stop’, ‘go’, ‘yes’, ‘no’, ‘on’, ‘off’, ‘one’, ‘two’, ‘three’, ‘four’, ‘five’, ‘six’, ‘seven’, ‘eight’, ‘nine’, ‘zero’]
其余关键字和无法识别的词属于“Unknown”类别,理解语音识别原理和相关神经网络代码调用。
见网址:【MAX7800实现KWS20 demo演示】_2345VOR的博客-CSDN博客_ai8x 训练
见项目进度主线2
3.3 ESP8266-NodeMCU软硬串口通讯——主线3
本次采用ESP8266node MCU开发板,利用自身软硬件串口通讯,采用关键字符串实现开灯功能🛹🛹🛹
见网址:ESP8266-NodeMCU软硬串口通讯
见项目进度主线3

3.4 MAX7800与ESP8266mcu串口通讯点灯——主线4
前期搭好MAX7800 的eclipse和ESP82666的Arduino开发环境,现在开始慢慢实现这两者的通讯,目前MAX7800 羽毛板可以发送字符串,但是ESP8266无法连续接收,因此采用简单的单个字符的串口通讯实现点灯功能。
见网址: MAX7800与ESP8266mcu串口通讯点灯
见项目进度主线4
3.5 MAX7800与ESP8266mcu通讯关键字控制——主线5
前期搭好MAX7800 的eclipse和ESP82666的Arduino开发环境,现在开始慢慢实现这两者的通讯,目前MAX7800 羽毛板可以发送字符串,但是ESP8266无法连续接收,因此采用简单的单个字符的串口通讯实现点灯功能,现在可以与esp8266实现KWS20关键字识别控制串口输出字符操作数。
见网址:MAX7800与ESP8266mcu通讯关键字控制
见项目进度副线1
4. 副线任务
副线任务围绕MAX7800基础案例开发,熟悉基本语法、相关外设驱动部分展开!🥳🥳🥳
4.1 搭建window下配置Maxim SDK环境——副线1
下面介绍如何在Windows下搭建Maxim SDK开发环境,我们就可以点灯,hello world啦!
见网址:【window下配置Maxim SDK环境】_2345VOR的博客-CSDN博客_maxim sdk
见项目进度副线1
4.2 MAX78000基础案例演示——副线2
挑选ADC、GPIO、UART三个幸运的例程进行学习演示,总结项目编译下载调试开发功能,熟悉语言规范。
见网址:【MAX78000基础案例演示】_2345VOR的博客-CSDN博客
见项目进度副线2
5. 具体实验
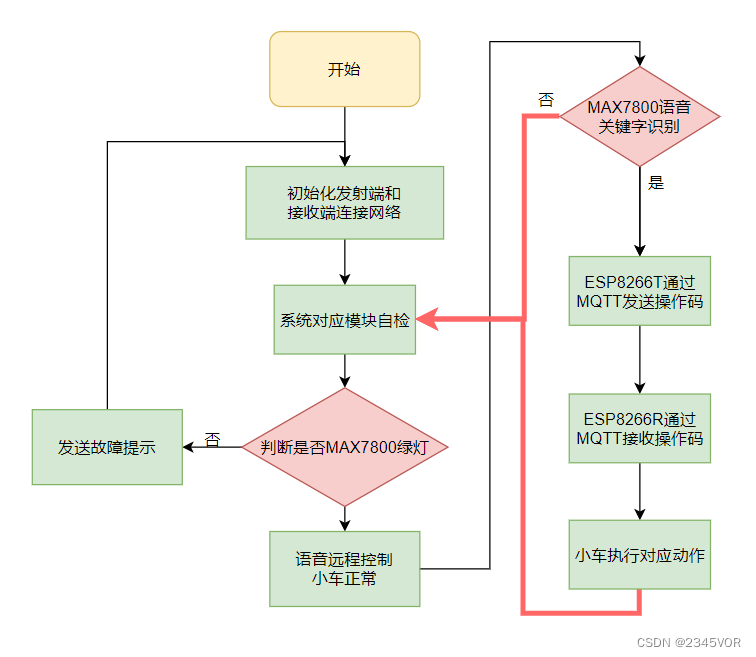
改善小车硬件结构,使羽毛板嵌入进去,设计控制逻辑程序,完成语音识别、串口驱动、关键字符解码、MQTT发送接收、设备驱动执行,程序控制流程图如下
5.1 前期构思
下面是语音关键字控制小车状态定义
5.1.1 语音匹配
['up', 'down']小车左右手部舵机状态
['left', 'right']小车左右转方向控制
['stop', 'go']小车状态控制
['yes', 'no']小车前进后退方向控制
['on', 'off']车灯控制状态
['one', 'two', 'three', 'zero']速度大小控制
['four', 'five', 'six', 'seven', 'eight', 'nine', 'unknow']无效关键字,保持小车原有状态
以上一共有15个字符MAX7800负责识别,然后发送到esp8266接收对应15个操作码。下图这是我通过MAX7800与esp8266通讯找到的,从225到339的15个操作码
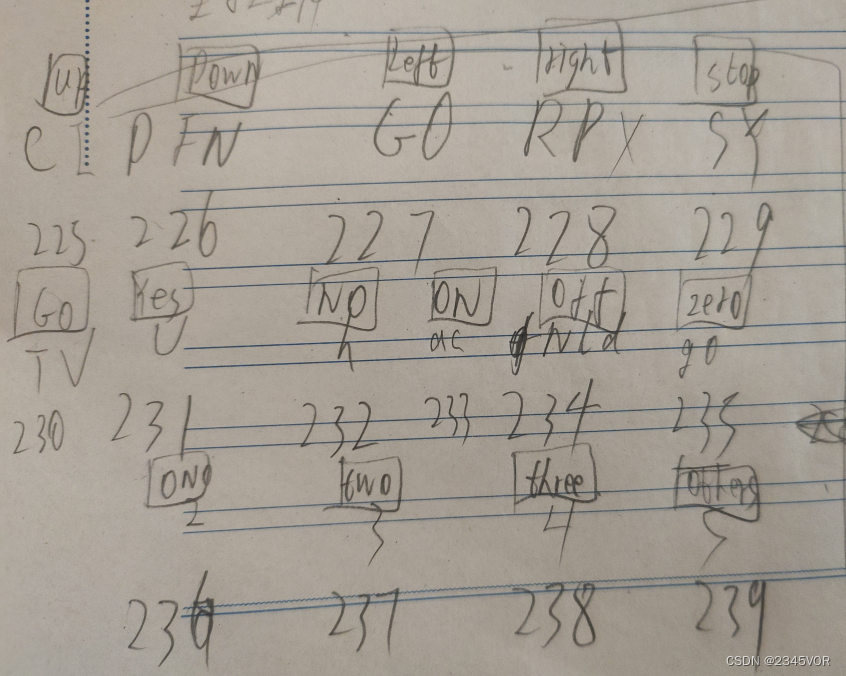
| 关键字 | up | down | left | right | stop | go | yes | no | on | off | one | two | three | zero | others |
| 字符 | CI | DFN | GO | RPX | SY | TV | U | h | ac | fnld | 2 | 3 | 4 | go | 5 |
| 操作数 | 225 | 226 | 227 | 228 | 229 | 230 | 231 | 232 | 233 | 234 | 236 | 237 | 238 | 235 | 239 |
关键代码展示
/* Set of detected words */
const char keywords[NUM_OUTPUTS][10] = { "UP", "DOWN", "LEFT", "RIGHT", "STOP", "GO",
"YES", "NO", "ON", "OFF", "ONE", "TWO",
"THREE", "FOUR", "FIVE", "SIX", "SEVEN", "EIGHT",
"NINE", "ZERO", "Unknown" };
const uint8_t TestTxData[BUFF1_SIZE]="CDGRSTUhaf234555555g5";5.1.2 操作码匹配
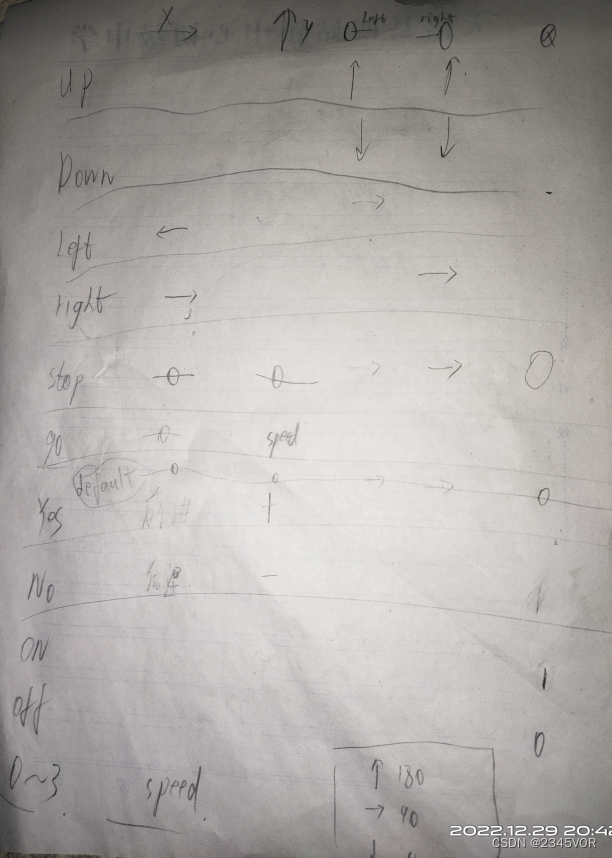
- 横坐标依次是小车关键状态
小车左右转方向,小车油门大小(有方向),左边舵机手,右边舵机手,车灯
- 纵坐标依次是语音关键字
['up', 'down', 'left', 'right', 'stop', 'go', 'yes', 'no', 'on', 'off', 'one', 'two', 'three', 'four', 'five', 'six', 'seven', 'eight', 'nine', 'zero']
下图显示小车关键状态与语音关键字一一对应关系!!!
关键代码展示
int A[4]={400,1850,3400,4200},B[6]={600,1850,3700,4200,3400,4090},C[4]={90,120,180,200},D[4]={90,60,0,200},E[4]={0,1,5,10};
int action[2][5] = {
{ A[3], B[3], C[3], D[3], E[3] },
{ A[1], B[1], C[1], D[1], E[0]}
};
int mylist[15][5] = {
{ A[3], B[3], C[2], D[2], E[3] },//up
{ A[3], B[3], C[0], D[0], E[3] },//down
{ A[0], B[3], C[1], D[2], E[3] },//left
{ A[2], B[3], C[2], D[1], E[3] },//right
{ A[1], B[1], C[1], D[1], E[0] },//stop
{ A[3], B[2], C[3], D[3], E[1] },//go
{ A[3], B[1], C[3], D[3], E[3] },//yes
{ A[3], B[0], C[3], D[3], E[3] },//no
{ A[3], B[3], C[3], D[3], E[1] },//on
{ A[3], B[3], C[3], D[3], E[0] },//off
{ A[3], B[1], C[3], D[3], E[3] },//zero
{ A[3], B[4], C[3], D[3], E[3] },//1
{ A[3], B[2], C[3], D[3], E[3] },//2
{ A[3], B[5], C[3], D[3], E[3] },//3
{ A[3], B[3], C[3], D[3], E[3] }//unknow
};5.2 硬件结构
此部分搭建系统的原理图和实物连接
原理图源码见:嘉立创EDA(标准版) - 免费、易用、强大的在线电路设计软件
5.2.1 原理图
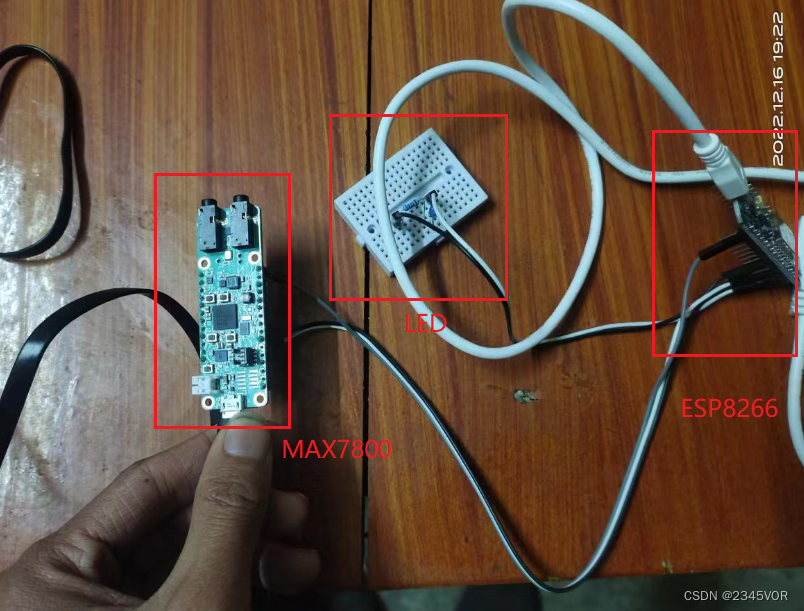
- 发射机
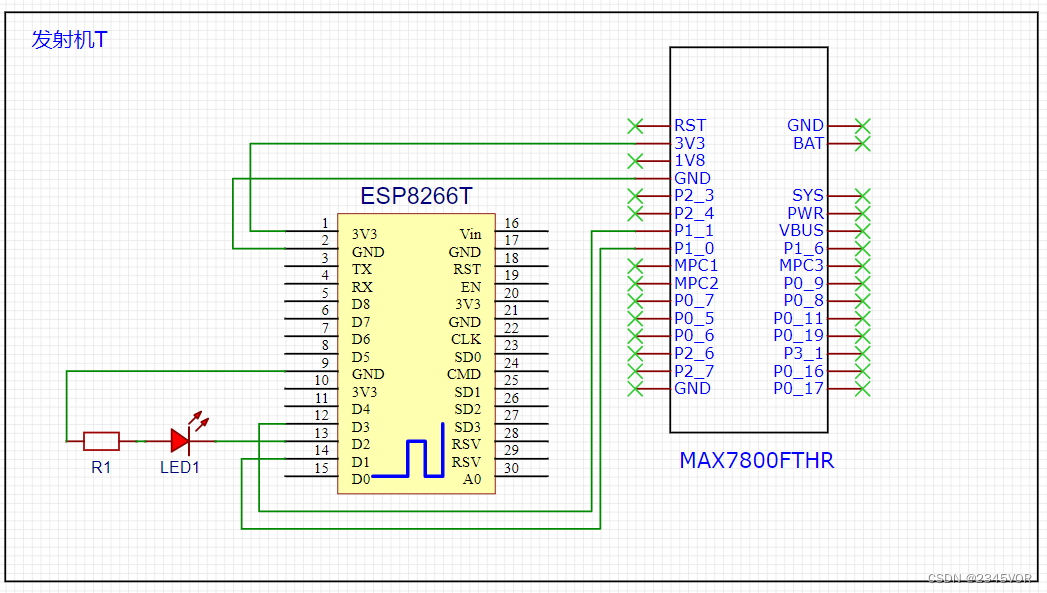
物料说明:
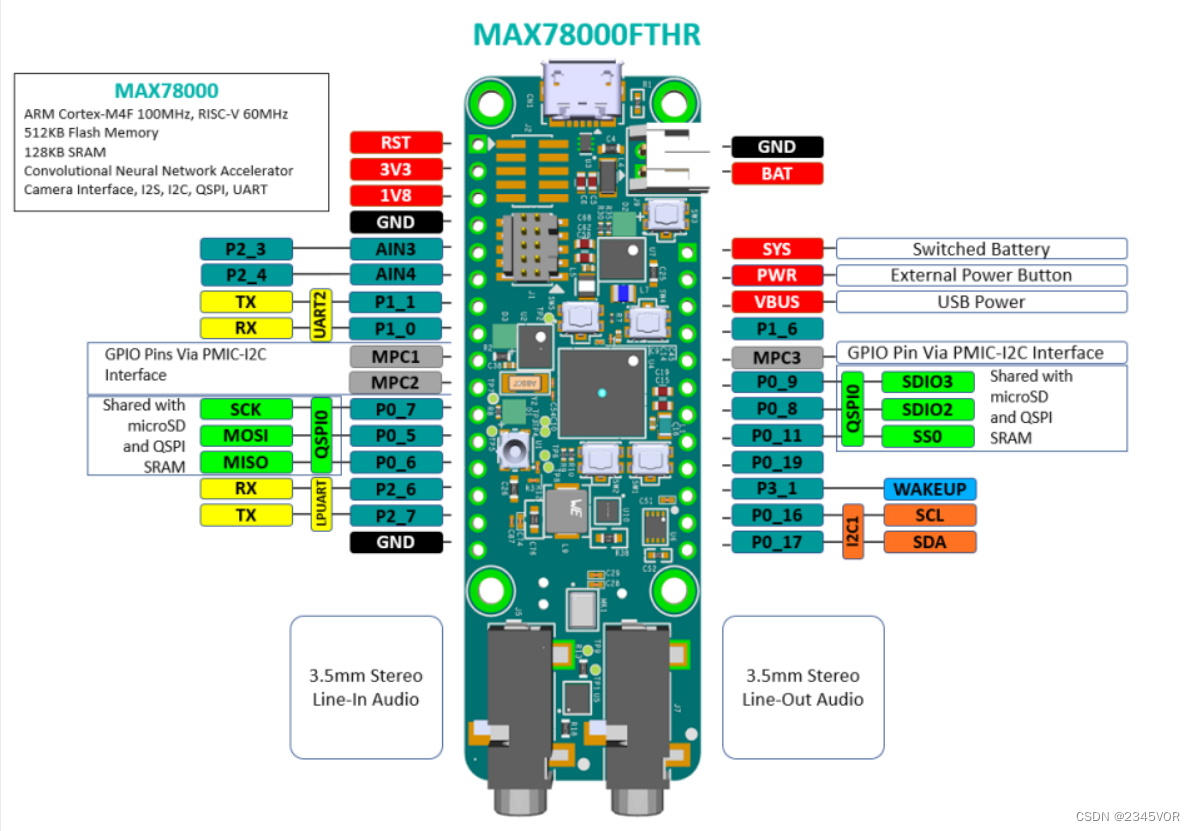
MAX7800:主控,语音识别20个关键单词,发送特定字符到esp8266,并SD卡记录,显示屏显示(没有设计TFT显示屏接线)
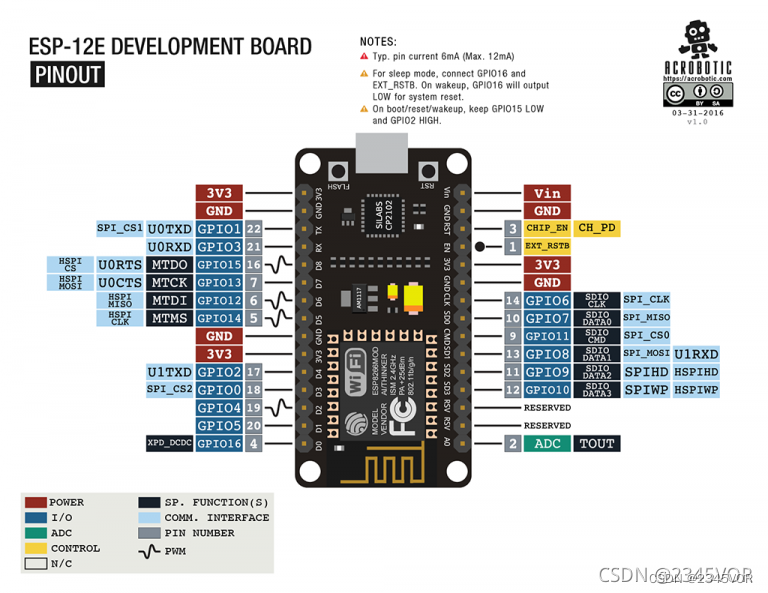
ESP8266T:中转器,接收MAX7800特定字符,匹配对应操作码关联小车状态参数,采用然也物联网平台使用MQTT远程传输小车状态参数指令
LED1:显示器,通过PWM驱动显示传输时的小车速度,采用亮暗程度表达

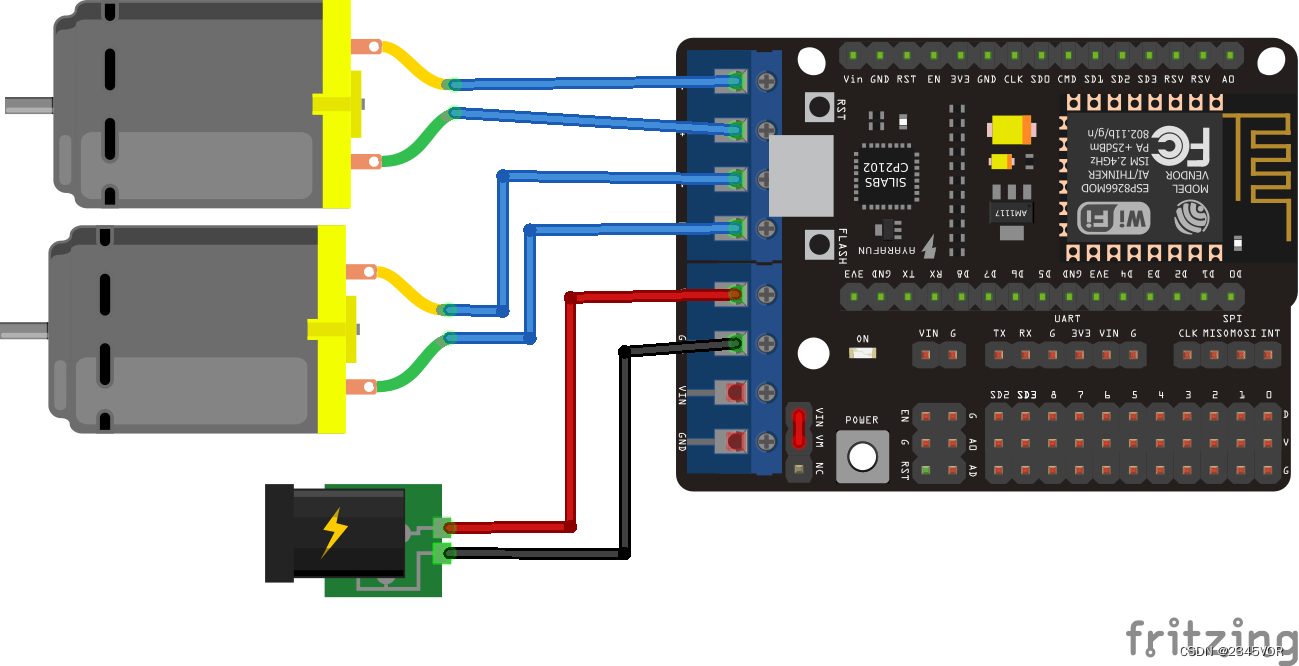
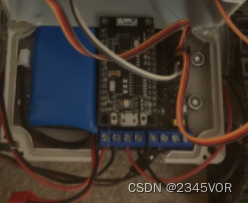
- 接收机
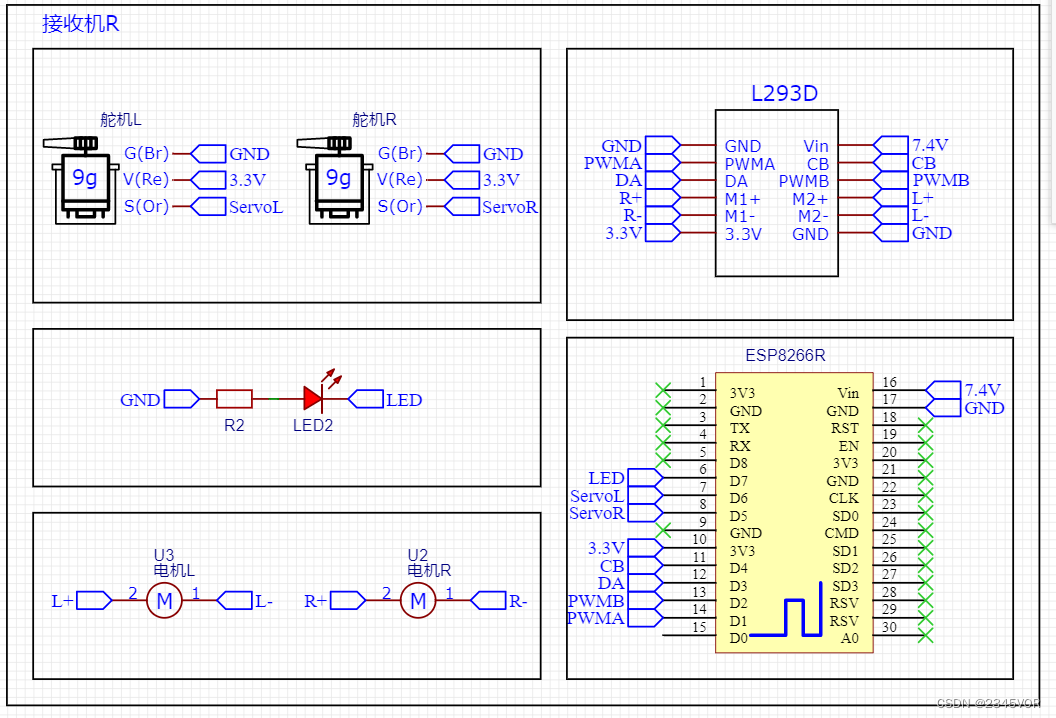
物料说明:
ESP8266:主控,采用然也物联网平台使用MQTT远程接收小车状态参数指令,下发操作码关联小车状态参数,驱动电机舵机LED
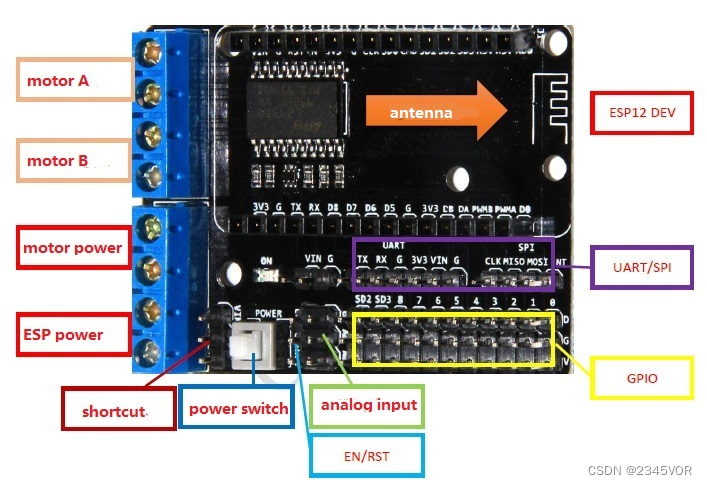
L293D:拓展驱动板,采用ESP12E 电机拓展板与 NodeMCU ESP8266 Amica 板兼容,扩展板直接放在微控制器上。电机的电源连接到 VM/GND 接线盒,电路板的电源连接到 VIN/GND 接线盒。如果电机的电源与 NodeMCU 的电源相同(<10V 最大值),则可以使用桥连接 VIN 和 VM 引脚。电机连接到接线端子 A+、A-、B+、B-。
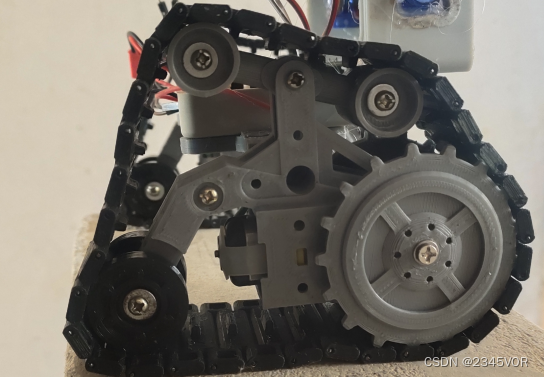
电机R:采用TT马达减速电机,连接右边坦克链条履带结构
电机L:采用TT马达减速电机,连接左边坦克链条履带结构
舵机R:采用常见的90舵机作为右手臂
舵机L:采用常见的90舵机作为右手臂
LED2:作为车灯,电机运行时亮,可单独关键词“on,off”控制
电源:采用2S航模电池作为接收机的能量供应



5.2.2 实物连接
- 发射机
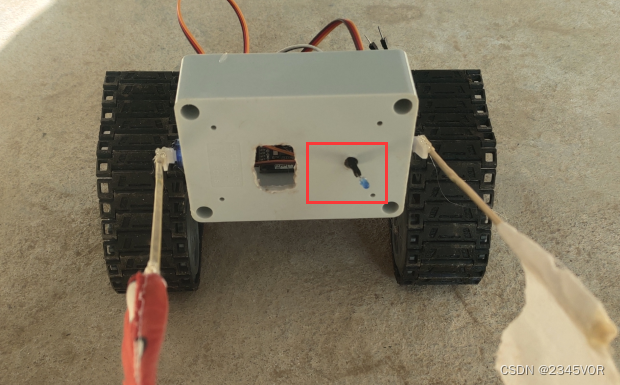
- 接收机
后视图
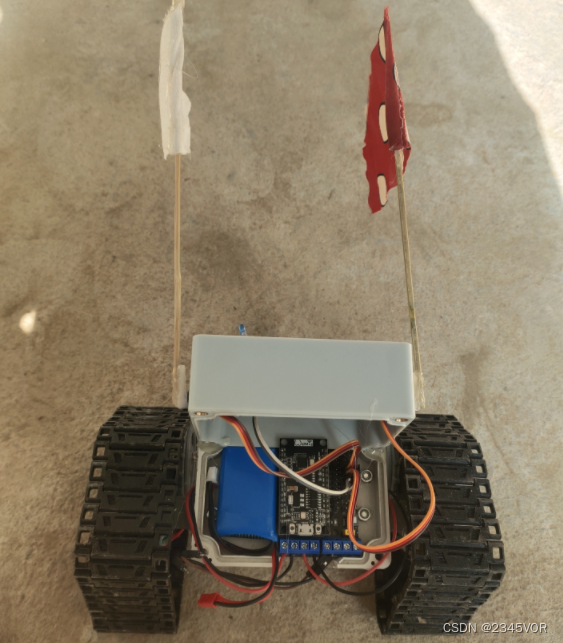
前视图
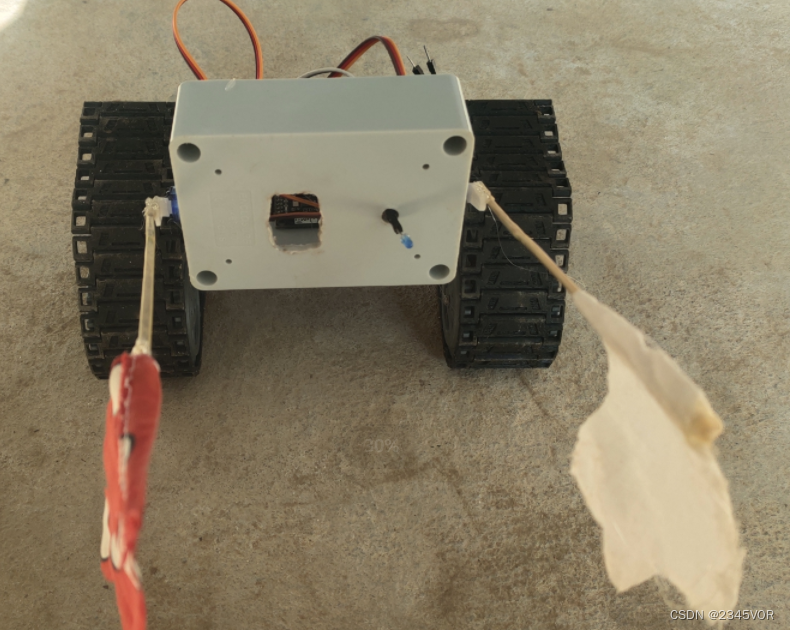
侧视图
5.3 软件设计
项目工程在gitcode托管,目前有两版,第一版可以简单测试串口,发行版可以正常控制

5.3.1 接收机
- max7800程序部分main.c,详细见工程
//字符数组定义
const char keywords[NUM_OUTPUTS][10] = { "UP", "DOWN", "LEFT", "RIGHT", "STOP", "GO",
"YES", "NO", "ON", "OFF", "ONE", "TWO",
"THREE", "FOUR", "FIVE", "SIX", "SEVEN", "EIGHT",
"NINE", "ZERO", "Unknown" };
const uint8_t TestTxData[BUFF1_SIZE]="CDGRSTUhaf234555555g5";
//置信度大于90采用串口2发送
/* output char*/
if(probability>90){
*firstName = TestTxData[out_class];
writemsg( firstName, 1);//发送串口2字符指令
printf("\n count : %d: %d: %s\n", count++,count%62,firstName);
/* */
}- esp8266T程序
// #include <WiFi.h>
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
// #define joyX 34
// #define joyY 35
// int Ym, Fx, R, L;
// 设置wifi接入信息(遥控器要连接的wifi)
// const char* ssid = "J09 502";
// const char* password = "qwertyuiop111";
// const char* ssid = "vor";
// const char* password = "vor980501";
const char* ssid = "XY-031026";
const char* password = "12345678";
String topicString = "minivorCar214923790t7"; //输入自己的特定主题名,能保证别人不和你重复就行
const char* mqttServer = "test.ranye-iot.net";
// const char* mqttServer = "8.142.157.58";
// 如以上MQTT服务器无法正常连接,请前往以下页面寻找解决方案
// http://www.taichi-maker.com/public-mqtt-broker/
WiFiClient wifiClient;
PubSubClient mqttClient(wifiClient);
/**mixly**/
#include <SoftwareSerial.h>
#define timer1 300
volatile int item;
volatile byte item1;
volatile int item2;
volatile byte item3;
volatile int operators;
String strings;
int A[4]={400,1850,3400,4200},B[6]={600,1850,3700,4200,3400,4090},C[4]={90,120,180,200},D[4]={90,60,0,200},E[4]={0,1,5,10};
int action[2][5] = {
{ A[3], B[3], C[3], D[3], E[3] },
{ A[1], B[1], C[1], D[1], E[0]}
};
int mylist[15][5] = {
{ A[3], B[3], C[2], D[2], E[3] },//up
{ A[3], B[3], C[0], D[0], E[3] },//down
{ A[0], B[3], C[1], D[2], E[3] },//left
{ A[2], B[3], C[2], D[1], E[3] },//right
{ A[1], B[1], C[1], D[1], E[0] },//stop
{ A[3], B[2], C[3], D[3], E[1] },//go
{ A[3], B[1], C[3], D[3], E[3] },//yes
{ A[3], B[0], C[3], D[3], E[3] },//no
{ A[3], B[3], C[3], D[3], E[1] },//on
{ A[3], B[3], C[3], D[3], E[0] },//off
{ A[3], B[1], C[3], D[3], E[3] },//zero
{ A[3], B[4], C[3], D[3], E[3] },//1
{ A[3], B[2], C[3], D[3], E[3] },//2
{ A[3], B[5], C[3], D[3], E[3] },//3
{ A[3], B[3], C[3], D[3], E[3] }//unknow
};
SoftwareSerial mySerial(0, 5);
/******/
void setup() {
/**mixly**/
item = 0;
item1 = ' ';
item2 = 0;
item3 = ' ';
operators = 4;//stop
strings = "hello";
Serial.begin(115200);
mySerial.begin(115200);
pinMode(4, OUTPUT);
//v1: 串口读取
//v2: 串口周期性点灯
//v3: 添加语音串口通讯点灯
//v4: 添加二维数组语音控制
digitalWrite(4, LOW);
Serial.println(strings);
mySerial.println(strings);
/******/
// pinMode(joyX, INPUT);
// pinMode(joyY, INPUT);
WiFi.mode(WIFI_STA); //设置ESP8266工作模式为无线终端模式
connectWifi(); // 连接WiFi
mqttClient.setServer(mqttServer, 1883); // 设置MQTT服务器和端口号
connectMQTTServer(); // 连接MQTT服务器
}
int count = 0;
void loop() {
if (mqttClient.connected()) { // 如果开发板成功连接服务器
pubMQTTmsg();
//count = 0;
mqttClient.loop(); // 保持客户端心跳
} else { // 如果开发板未能成功连接服务器
connectMQTTServer(); // 则尝试连接服务器
}
delay(10);
}
void connectMQTTServer() {
// 根据ESP32的MAC地址生成客户端ID(避免与其它ESP32的客户端ID重名)
String clientId = "esp8266-" + WiFi.macAddress();
// 连接MQTT服务器
if (mqttClient.connect(clientId.c_str())) {
Serial.println("MQTT Server Connected.");
Serial.println("Server Address: ");
Serial.println(mqttServer);
Serial.println("ClientId:");
Serial.println(clientId);
} else {
Serial.print("MQTT Server Connect Failed. Client State:");
Serial.println(mqttClient.state());
delay(3000);
}
}
void pubMQTTmsg() {
static int value; // 客户端发布信息用数字
char publishTopic[topicString.length() + 1]; // 这么做是为确保不同用户进行MQTT信息发布时,ESP8266客户端名称各不相同,
strcpy(publishTopic, topicString.c_str());
// Ym = analogRead(joyY); //读取油门信息
// Fx = analogRead(joyX); //读取方向信息
// // 建立发布信息。信息内容以Hello World为起始,后面添加发布次数。
// String messageString = "A" + String(Ym) + "B" + String(Fx) + "C" + String(R) + "D" + String(L) + "E";
/**mixly**/
procedure2();
procedure();
procedure4(operators);
if (item > 234 && item < 239) {
// procedure3();
// delay(100);
item = (map(item - 235, 0, 3, 0, 255));
analogWrite(4, item);
}
if (item == 229) {
digitalWrite(4, LOW);
}
String messageString = strings;
/**mixly**/
char publishMsg[messageString.length() + 1];
strcpy(publishMsg, messageString.c_str());
// 实现ESP32向主题发布信息
if (mqttClient.publish(publishTopic, publishMsg)) {
//Serial.println("Publish Topic:");Serial.println(publishTopic);
//Serial.println("Publish message:");
Serial.println(publishMsg);
} else {
Serial.println("Message Publish Failed.");
}
delay(timer1);
}
void connectWifi() {
WiFi.begin(ssid, password);
//等待WiFi连接,成功连接后输出成功信息
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi Connected!");
Serial.println("");
}
void procedure() {
if (item3 != item1) {
Serial.print("item: ");
Serial.println(item);
Serial.print("item1: ");
Serial.println(item1);
item3 = item1;
}
}
void procedure2() {
if (Serial.available() > 0) {
item1 = Serial.read();
}
if (mySerial.available() > 0) {
item1 = mySerial.read();
item = String(item1).toInt();
operators = item - 225;
}
if (item == 0) {
item = item2;
}
item2 = item;
}
void procedure3() {
Serial.println("ok");
mySerial.println("ok");
}
void procedure4(int x) {
for (int i = 0; i <= 4; i = i + (1)) {
if (mylist[x][i] < action[0][i]) {
action[1][i] = mylist[x][i];
}
}
strings = String("A") + String(3700-action[1][0]) + String("B") + String(action[1][1]) + String("C") + String(action[1][2]) + String("D") + String(action[1][3]) + String("E") + String(action[1][4]) + String("F");
// strings0 = String("A") + String(A[1]) + String("B") + String(B[1]) + String("C") + String(C[1]) + String("D") + String(D[1]) + String("E") + String(E[0]) + String("F");
// Serial.print("massage: ");
// Serial.println(strings);
}
5.3.2 发射机
- esp8266R程序
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <Ticker.h>
#include <espnow.h>
#include <Servo.h> // 调用Servo库
Servo servo_R; // 定义Servo对象来控制
Servo servo_L; // 定义Servo对象来控制
Ticker ticker;
/*
Board pin | NodeMCU GPIO | Arduino IDE
A- 1 5 or D1
A+ 3 0 or D3
B- 2 4 or D2
B+ 4 2 or D4
*/
#define IN_1 D1
#define IN_2 D3
#define IN_3 D2
#define IN_4 D4
#define LED D7
// #define servopinr D5
// #define servopinl D6
//↑↑↑以上4个IO口可以输出PWM波,实现全比例控制速度
// 设置wifi接入信息(根据小车要连接的WiFi信息进行修改)
// const char* ssid = "J09 502";
// const char* password = "qwertyuiop111";
// const char* ssid = "vor";
// const char* password = "vor980501";
const char* ssid = "XY-031026";
const char* password = "12345678";
String topicString = "minivorCar214923790t7"; //与esp32代码中的该部分相同
int YmMedian = 1816; //油门中位值
int FxMedian = 1811; //方向中位值
const char* mqttServer = "test.ranye-iot.net";
// 如以上MQTT服务器无法正常连接,请前往以下页面寻找解决方案
// http://www.taichi-maker.com/public-mqtt-broker/
int Ym, Fx, LeCar;
WiFiClient wifiClient;
PubSubClient mqttClient(wifiClient);
void setup() {
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
pinMode(LED, OUTPUT);
// pinMode(servopinr, OUTPUT); //设定舵机接口为输出接口
// pinMode(servopinl, OUTPUT); //设定舵机接口为输出接口
while (esp_now_init() != 0) {
Serial.println("Error initializing ESP-NOW");
}
servo_R.attach(D5,500,2500); // 控制线连接数字D5
servo_L.attach(D6,500,2500); // 控制线连接数字D6
goStop();
Serial.begin(115200); // 启动串口通讯(波特率为9600,波特率可以理解为串口传输数据的速度)
WiFi.mode(WIFI_STA); //设置ESP8266工作模式为无线终端模式(8266像手机一样连接到wifi的模式)
connectWifi(); // 连接WiFi
mqttClient.setServer(mqttServer, 1883); // 设置MQTT服务器和端口号
mqttClient.setCallback(receiveCallback); // 设置MQTT订阅回调函数
connectMQTTserver(); // 连接MQTT服务器
ticker.attach(0.3, touch);
}
void loop() {
if (mqttClient.connected()) { // 如果开发板成功连接服务器
mqttClient.loop(); // 处理信息以及心跳
} else { // 如果开发板未能成功连接服务器
goStop();
connectMQTTserver(); // 则尝试连接服务器
}
}
// 连接MQTT服务器并订阅信息
void connectMQTTserver() {
// 根据ESP8266的MAC地址生成客户端ID(避免与其它ESP8266的客户端ID重名)
String clientId = "esp8266-" + WiFi.macAddress();
// 连接MQTT服务器
if (mqttClient.connect(clientId.c_str())) {
Serial.println("MQTT Server Connected.");
Serial.println("Server Address:");
Serial.println(mqttServer);
Serial.println("ClientId: ");
Serial.println(clientId);
subscribeTopic(); // 订阅指定主题
} else {
Serial.print("MQTT Server Connect Failed. Client State:");
Serial.println(mqttClient.state());
delay(5000);
}
}
// 收到信息后的回调函数
// char Ym0[5], Fx0[5]; //储存接受到的油门和方向数据
// int Alocation, Blocation, Clocation, Ym1, Fx1;
char Ym0[5], Fx0[5], R0[5], L0[5], M0[5]; //储存接受到的油门和方向数据
int Alocation, Blocation, Clocation, Dlocation, Elocation, Flocation, Ym1=1850, Fx1=1850, R1=90, L1=90, M1=0; //定义解析标记位
// 收到信息后的回调函数
//A1827B1835C180D180E0F
void receiveCallback(char* topic, byte* payload, unsigned int length) {
if ((char)payload[0] == 'A') //检测esp8266是否联网
{
LeCar = 1;
} else {
LeCar = 0;
}
int j = 0, k = 0, l = 0, n = 0, o = 0;
for (int i = 1; i < 6; i++) {
if ((char)payload[i] != 'B') {
Ym0[j] = (char)payload[i];
j += 1;
} else {
Blocation = i;
break;
}
}
for (int i = Blocation + 1; i < 11; i++) {
if ((char)payload[i] != 'C') {
Fx0[k] = (char)payload[i];
k += 1;
} else {
Clocation = i;
break;
}
}
for (int i = Clocation + 1; i < 15; i++) {
if ((char)payload[i] != 'D') {
R0[l] = (char)payload[i];
l += 1;
} else {
Dlocation = i;
break;
}
}
for (int i = Dlocation + 1; i < 19; i++) {
if ((char)payload[i] != 'E') {
L0[n] = (char)payload[i];
n += 1;
} else {
Elocation = i;
break;
}
}
for (int i = Elocation + 1; i < length; i++) {
if ((char)payload[i] != 'E') {
M0[o] = (char)payload[i];
o += 1;
} else {
Flocation = i;
break;
}
}
// Ym1 = String(Ym0).toInt();
// Fx1 = String(Fx0).toInt();
Fx1 = String(Ym0).toInt();
Ym1 = String(Fx0).toInt();
R1 = String(R0).toInt();
L1 = String(L0).toInt();
M1 = String(M0).toInt();
//Ym1 = map(Ym1,YmMedian+50, 4095, 0, 255);
// Serial.print("Ym=");
// Serial.print(Ym1);
// Serial.print(",FX=");
// Serial.println(Fx0);
for (int i = 0; i < 5; i++) {
Ym0[i] = '\0';
Fx0[i] = '\0';
R0[i] = '\0';
L0[i] = '\0';
M0[i] = '\0';
}
}
// 订阅指定主题
void subscribeTopic() {
char subTopic[topicString.length() + 1];
strcpy(subTopic, topicString.c_str());
if (mqttClient.subscribe(subTopic)) {
Serial.println("Subscrib Topic:");
Serial.println(subTopic);
} else {
Serial.print("Subscribe Fail...");
}
}
void connectWifi() {
WiFi.begin(ssid, password);
//等待WiFi连接,成功连接后输出成功信息
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi Connected!");
Serial.println("");
}
int Speedy1, Speedy2, Speedx1, Speedx2, direction;
void touch() {
// Serial.print(Ym1);
// Serial.print(",");
// int a=YmMedian+50;
// Serial.println(a);
if (Ym1 > YmMedian + 50) {
Ym = map(Ym1, YmMedian + 50, 4095, 0, 255);
Speedy1 = Ym;
direction = 0;
// Serial.print("Speedy1:");
// Serial.println(Speedy1);
Speedy2 = 0;
} else if (Ym1 < YmMedian - 50) {
Ym = 255 - map(Ym1, 0, YmMedian - 50, 0, 255);
Speedy1 = 0;
direction = 1;
Speedy2 = Ym;
// Serial.print("Speedy2:");
// Serial.println(Speedy2);
} else if (Fx1 > FxMedian + 50) {
Fx = map(Fx1, FxMedian + 50, 4095, 0, 255);
Speedx1 = Fx;
// Serial.print("Speedx1:");
// Serial.println(Speedx1);
Speedx2 = 0;
} else if (Fx1 < FxMedian - 50) {
Fx = 255 - map(Fx1, 0, FxMedian - 50, 0, 255);
Speedx1 = 0;
Speedx2 = Fx;
// Serial.print("Speedx2:");
// Serial.println(Speedx2);
} else if (YmMedian - 50 < Ym1 < YmMedian + 50 && FxMedian - 50 < Fx1 < FxMedian + 50) {
Speedy1 = 0;
Speedy2 = 0;
Speedx1 = 0;
Speedx2 = 0;
Ym = 0;
Fx = 0;
}
if (LeCar == 1)
GoCar();
else
goStop();
}
void GoCar() {
analogWrite(IN_1, Speedy1 + Speedx1 + Speedy2);
digitalWrite(IN_2, direction);
analogWrite(IN_3, Speedy1 + Speedx2 + Speedy2);
digitalWrite(IN_4, direction);
Serial.println("IN_1: " + String(Speedy1 + Speedx1 + Speedy2) + "IN_3: " + String(Speedy1 + Speedx2 + Speedy2));
Serial.println("A" + String(Ym1) + "B" + String(Fx1) + "C" + String(R1) + "D" + String(L1) + "E"+ String(M1) + "F");
servo_R.write(R1); // 舵机角度写入
servo_L.write(L1); // 舵机角度写入
digitalWrite(LED,M1);
}
void goStop() {
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, LOW);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, LOW);
digitalWrite(LED, LOW);
servo_R.write(90); // 舵机角度写入
servo_L.write(90); // 舵机角度写入
// delay(100);
}
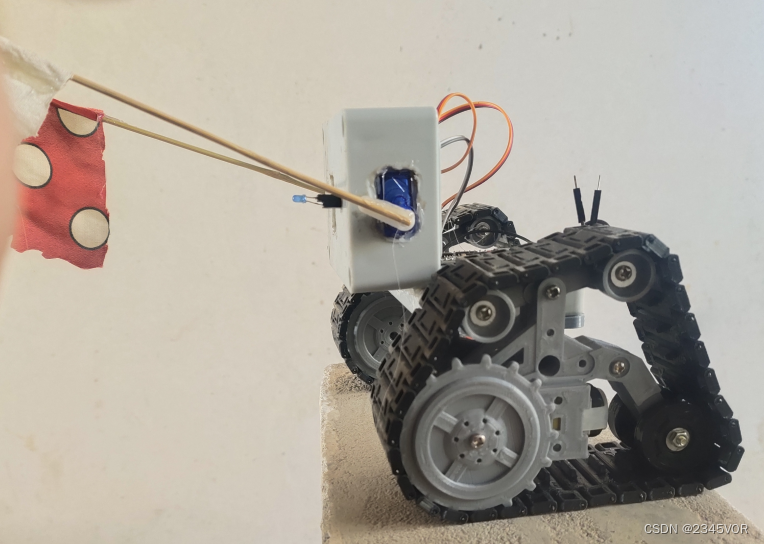
6. 实验效果
首先是搭建接收机和发射机硬件结构,然后下载程序,检查设备接线,测试15组关键字功能
max7800串口打印效果
21:05:31.663 -> ***** Init *****
21:05:31.664 -> pChunkBuff: 128
21:05:31.665 -> pPreambleCircBuffer: 3840
21:05:31.668 -> pAI85Buffer: 16384
21:05:31.737 -> Error opening SD card: FR_NOT_READY
21:05:31.741 -> *** !!!SD ERROR (mounting) !!! ***
21:05:31.744 ->
21:05:31.744 -> *** I2S & Mic Init ***
21:05:33.741 ->
21:05:33.741 -> *** READY ***
21:05:42.895 -> 136448 Word starts from index: 132480, avg:499 > 350
21:05:43.371 -> 144000: Word ends, Appends 4992 zeros
21:05:43.375 -> 144000: Starts CNN: 1
21:05:43.376 ->
21:05:43.378 -> 144000: Completes CNN: 1
21:05:43.381 -> CNN Time: 1843 us
21:05:43.382 -> Min: -128, Max: 127
21:05:43.384 -> -----------------------------------------
21:05:43.388 -> Detected word: ON (96.5%)
21:05:43.391 -> count : 0: 1: a
21:05:43.392 ->
21:05:43.392 -> -----------------------------------------
21:05:43.454 -> Error opening SD card: FR_NOT_READY
21:05:43.455 -> *** !!!SD ERROR!!! ***
21:05:43.457 ->
21:05:43.457 ->
21:05:43.457 -> *** READY ***
21:05:47.081 -> 201984 Word starts from index: 198016, avg:407 > 350
21:05:47.502 -> 208640: Word ends, Appends 5888 zeros
21:05:47.507 -> 208640: Starts CNN: 2
21:05:47.511 -> 208640: Completes CNN: 2
21:05:47.513 -> CNN Time: 1843 us
21:05:47.518 -> Min: -115, Max: 110
21:05:47.518 -> -----------------------------------------
21:05:47.520 -> Detected word: OFF (100.0%)
21:05:47.523 -> count : 1: 2: f
21:05:47.524 ->
21:05:47.524 -> -----------------------------------------
21:05:47.583 -> Error opening SD card: FR_NOT_READY
21:05:47.586 -> *** !!!SD ERROR!!! ***
21:05:47.588 ->
21:05:47.589 ->
21:05:47.589 -> *** READY *** 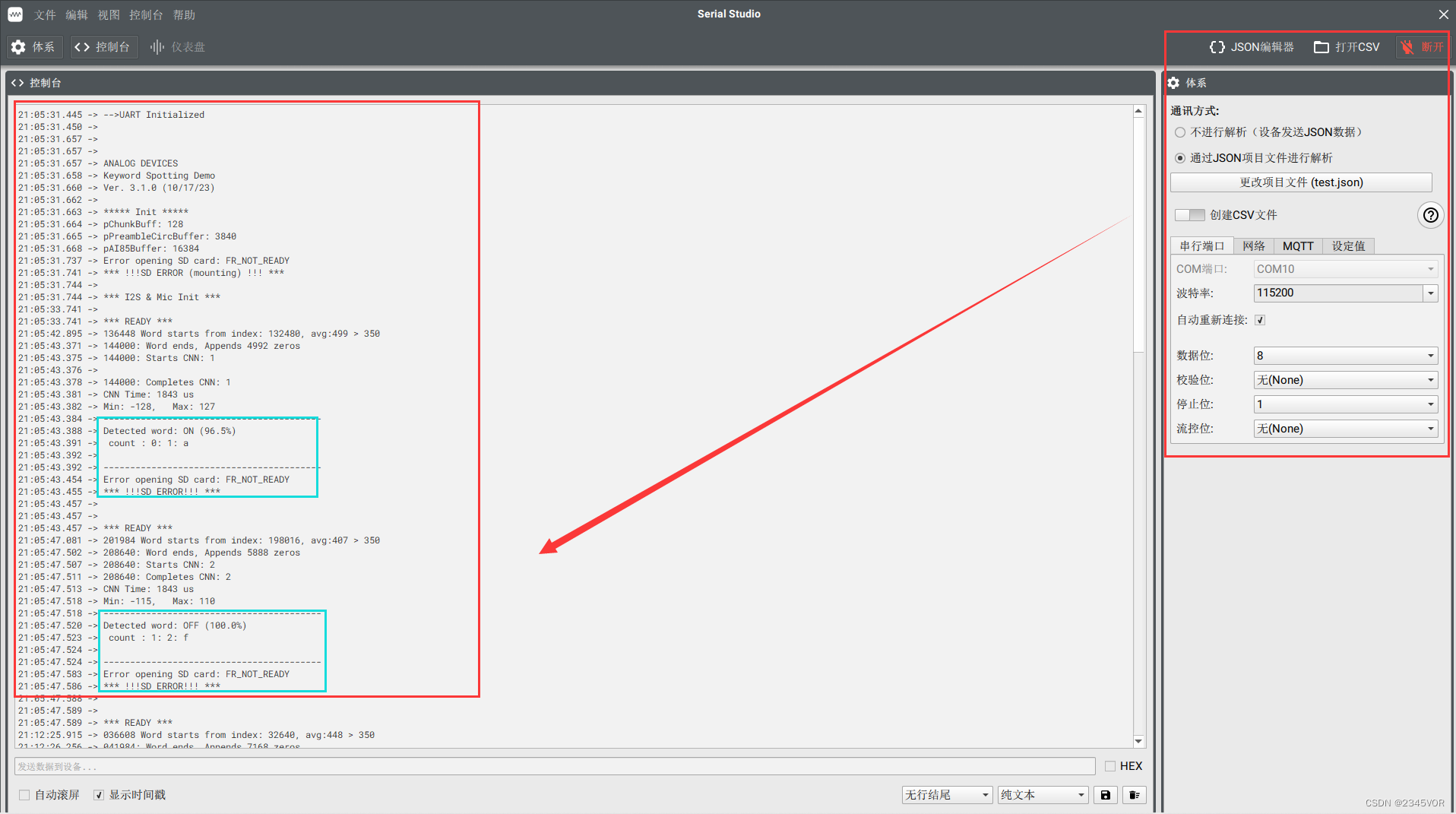
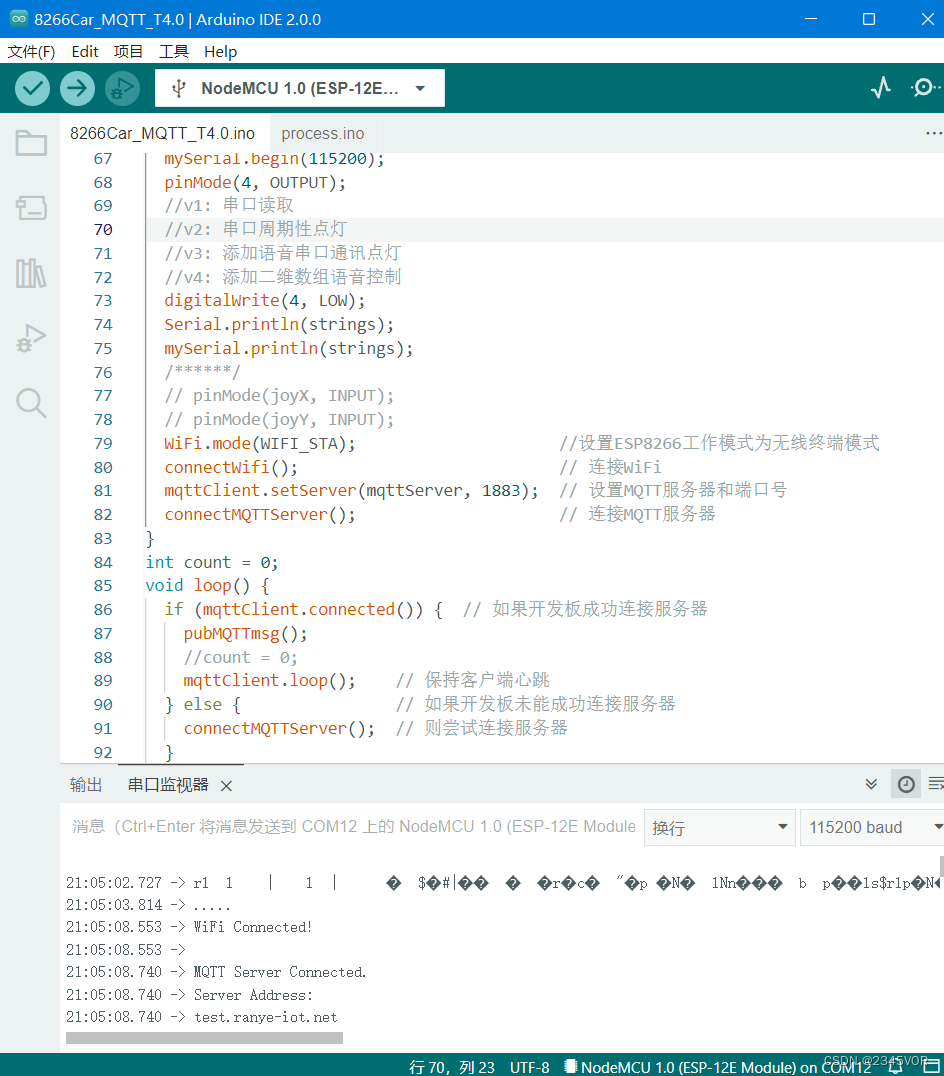
esp8266T串口打印效果
21:05:02.727 -> rll��|�l�|�$�#|����r�c�"�p�N�lNn���bp��ls$rlp�N��$��#n�|���b��nn�$��l �Nn�{lor���o{r� p�o�r������bN��o�c��no��d �Nn�lor���Nrl`r��or$`����l$`��N�dhello
21:05:03.814 -> .....
21:05:08.553 -> WiFi Connected!
21:05:08.553 ->
21:05:08.740 -> MQTT Server Connected.
21:05:08.740 -> Server Address:
21:05:08.740 -> test.ranye-iot.net
21:05:08.740 -> ClientId:
21:05:08.740 -> esp8266-C8:2B:96:08:73:AD
21:05:08.740 -> A1850B1850C120D60E0F
21:05:09.051 -> A1850B1850C120D60E0F
21:05:09.361 -> A1850B1850C120D60E0F
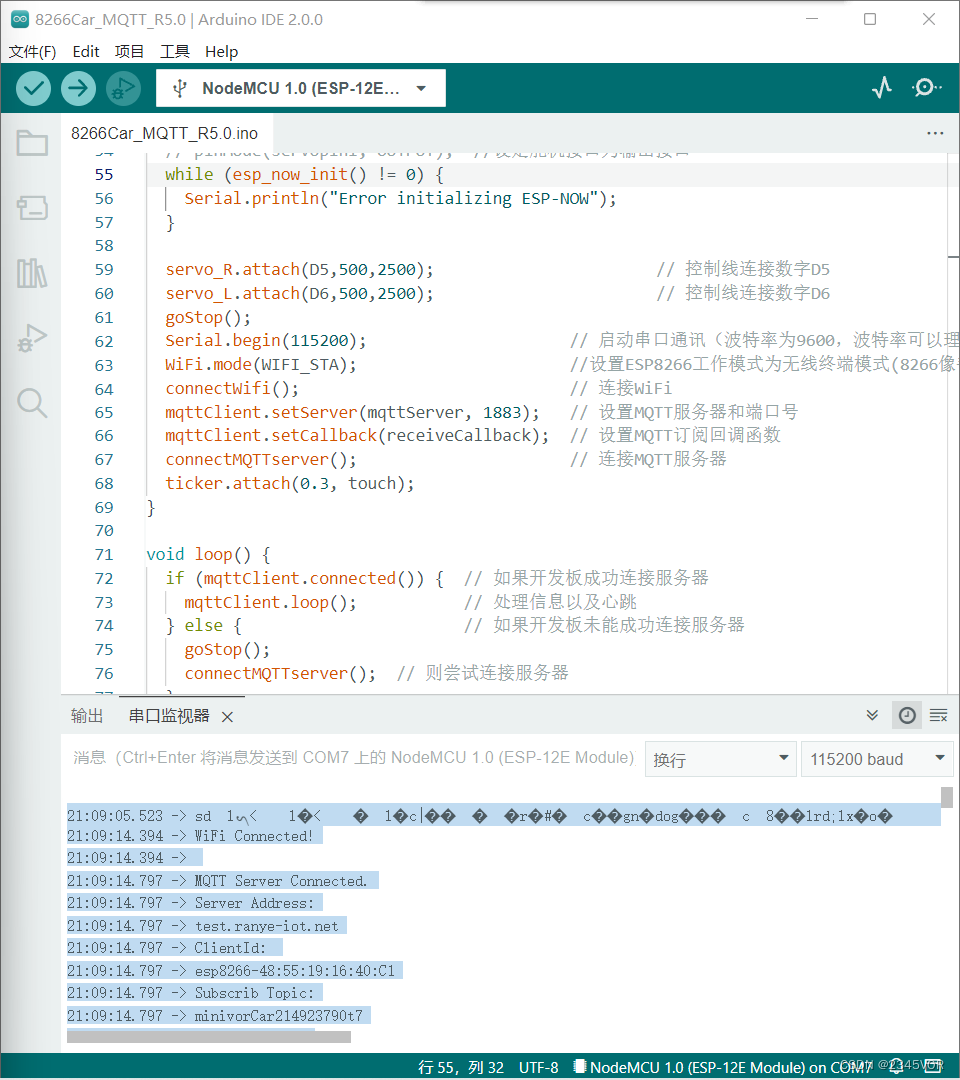
esp8266R串口打印效果
21:09:05.523 -> sdlܟ<�l�<�l�c|����r�#�c��gn�dog���c8��lrd;lx�o��d��#g�|�Ǐ#��ng�$��l �'o�dgs���ors�`p�'�s�ܜ���co�<�c��'o��d`�'o�dgs���or$`r��gsl`�����d`��g�d........
21:09:14.394 -> WiFi Connected!
21:09:14.394 ->
21:09:14.797 -> MQTT Server Connected.
21:09:14.797 -> Server Address:
21:09:14.797 -> test.ranye-iot.net
21:09:14.797 -> ClientId:
21:09:14.797 -> esp8266-48:55:19:16:40:C1
21:09:14.797 -> Subscrib Topic:
21:09:14.797 -> minivorCar214923790t7
21:09:18.079 -> IN_1: 0IN_3: 0
21:09:18.079 -> A1850B1850C120D60E0F
21:09:18.388 -> IN_1: 0IN_3: 0
演示视频:基于MAX7800羽毛板语音控制ESP8266小车_哔哩哔哩_bilibili


7. 总结
- 这是我第二次参加嵌入式相关的网上比赛活动,第一次是RT-Thread的【基于RT-Thread+RA6M4的智能鱼缸系统设计之鱼我所欲也】活动,作品是022年暑假做的获得第六名,还是比较 开心!
- 我相信我的付出,期待这一次的成绩!
虽然这次比赛初期我没有进行kws20 demo的训练试验,但是勇敢的我说是站在巨人的肩膀上,有点小遗憾我的时间和电脑都比较拉胯,下次争取做一些训练,跑一跑模型!🛹🛹🛹我们每天都一点点结合联动丰富生活,从而实现对外部世界进行充分的感知,尽最大努力认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣
🥳🥳🥳再次非常感谢大赛支持和胡同学,乔大哥等等🥳🥳🥳
参考文献
- [window10下配置Maxim SDK]()
- [数据手册]()
- [MAX78000板卡项目汇总]()
- [应用笔记]()
- [MAX78000 关键字定位演示 v.3]()
- [【window下配置Maxim SDK环境】]()
- [【MAX78000基础案例演示】]()
- [【MAX7800实现KWS20 demo演示】]()
- [【MAX7800与ESP8266mcu串口通讯点灯】]()