确定两条连续线段向左转还是向右转
目录
- 一、说明
- 二、算法
- 2.1 两点的叉积
- 2.2 两个段的叉积
- 三、旋转方向判别
- 3.1 左转
- 3.2、右转
- 3.3 共线判别
一、说明
如果是作图,或者是判别小车轨迹。为了直观地了解,从当前点到下一个点过程中,什么是左转、什么是右转,或者方向不变,这在现场实时运算中是很重要的。本篇描述其快速算法。
请考虑下面所示的示例。
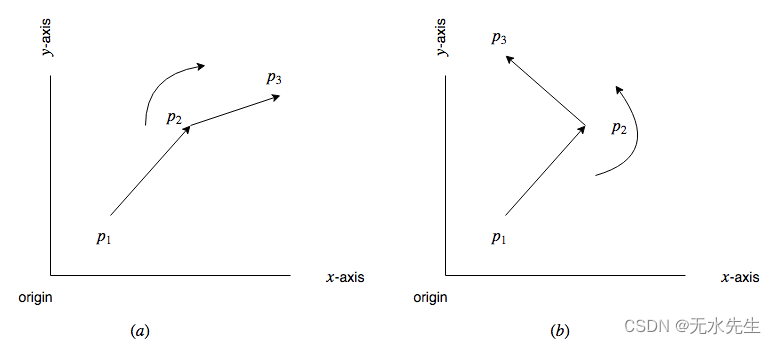
两图中,共有三点p1,p2和p3和两条线段 p 1 p 2 ‾ \overline{p_1p_2} p1p2和 p 2 p 3 ‾ \overline{p_2p_3} p2p3。中途点 p 2 p_2 p2是两条线段共有的。在图(a)中,线段 p 2 p 3 ‾ \overline{p_2p_3} p2p3在 p 2 p_2 p2该点右转而在图(b)中,段 p 2 p 3 ‾ \overline{p_2p_3} p2p3在公共点 p 2 p_2 p2左转。我们的眼睛更容易通过观察图形来快速识别路段是左转还是右转,因为您的眼睛天生具有快速识别事物的能力。在这篇文章中,我将讨论计算机如何使用几何算法来识别这一点。
二、算法
2.1 两点的叉积
给定两点
p
1
(
x
1
,
y
1
)
p_1(x_1,y_1)
p1(x1,y1)和
p
2
(
x
2
,
y
2
)
p_2(x_2,y_2)
p2(x2,y2),我们首先需要判断点是否
p
1
p_1
p1从点开始是顺时针还是逆时针
p
2
p_2
p2就起源而言。解决这个问题的一种方法是计算两者所成的角度
p
1
‾
\overline{p_1}
p1和
p
2
‾
\overline{p_2}
p2
和X轴和角度的差异可以判断一个点是顺时针还是逆时针。有一个比查找计算向量叉积的角度更简单有效的解决方案
p
1
‾
\overline{p_1}
p1和
p
2
‾
\overline{p_2}
p2。数学上两个向量的叉积
p
1
‾
\overline{p_1}
p1和
p
2
‾
\overline{p_2}
p2定义成:
p
1
×
p
2
=
x
1
y
2
−
x
2
y
1
p_1×p_2=x_1y_2-x_2y_1
p1×p2=x1y2−x2y1
如果值p1×p2则为正,p1是沿逆时针到达p2,关于原点如下图所示。
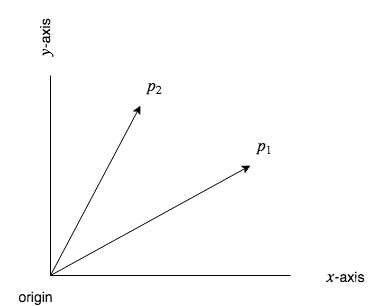
同样,如果p1×p2是负数,从p1到p2是顺时针过度。相对于原点,如果值为 0,则点p1,p2和原点共线。以下 python 代码实现了叉积。
class Point:
def __init__(self, x, y):
self.x = x
self.y = y
def subtract(self, p):
return Point(self.x - p.x, self.y - p.y)
def __str__(self):
return '(' + str(self.x) + ', ' + str(self.y) + ')'
# calculates the cross product of vector p1 and p2
# if p1 is clockwise from p2 wrt origin then it returns +ve value
# if p2 is anti-clockwise from p2 wrt origin then it returns -ve value
# if p1 p2 and origin are collinear then it returs 0
def cross_product(p1, p2):
return p1.x * p2.y - p2.x * p1.y
2.2 两个段的叉积
考虑两个线段,其端点是p1(X1,y1),p2(X2,y2)和p1(X1,y1),p3(X3,y3)分别。为了计算两个线段的叉积,我们需要将它们转换为向量。这可以通过以下方式完成。
p 1 p 2 ‾ = ( x 2 − x 1 , y 2 − y 1 ) , p 1 p 3 ‾ = ( x 3 − x 1 , y 3 − y 1 ) \overline{p_1p_2} = (x_2 - x_1, y_2 - y_1), \overline{p_1p_3} = (x_3 - x_1, y_3 - y_1) p1p2=(x2−x1,y2−y1),p1p3=(x3−x1,y3−y1)
一旦我们有了两个两个向量,我们就可以调用cross_product来计算叉积,如下面的代码所示。
# returns the cross product of vector p1p3 and p1p2
# if p1p3 is clockwise from p1p2 it returns +ve value
# if p1p3 is anti-clockwise from p1p2 it returns -ve value
# if p1 p2 and p3 are collinear it returns 0
def direction(p1, p2, p3):
return cross_product(p3.subtract(p1), p2.subtract(p1))
三、旋转方向判别
3.1 左转
判断一个段是否
p
2
p
3
p_2p_3
p2p3从路段左转
p
1
p
2
p_1p_2
p1p2在点
p
2
p_2
p2,我们画下一个向量
p
1
p
3
‾
\overline{p_1p_3}
p1p3并检查新向量是否与向量逆时针方向
p
2
p
3
‾
\overline{p_2p_3}
p2p3。如下图所示。右图显示向量
在这里插入代码片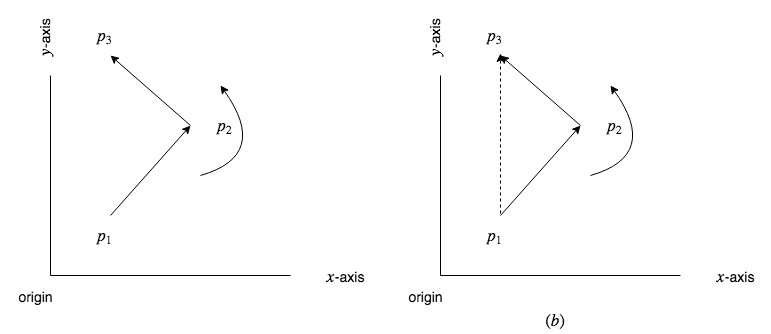
p
1
p
3
‾
\overline{p_1p_3}
p1p3从向量逆时针方向
p
1
p
2
‾
\overline{p_1p_2}
p1p2因此我们可以说该段p2p3
从路段左转p1p2在点p2。下面给出了 python 实现。
# checks if p3 makes left turn at p2
def left(p1, p2, p3):
return direction(p1, p2, p3) < 0
3.2、右转
这与左转相同,唯一的区别是向量 p 1 p 3 ‾ \overline{p_1p_3} p1p3从向量顺时针方向 p 2 p 3 ‾ \overline{p_2p_3} p2p3。下面给出了 python 实现。
# checks if p3 makes right turn at p2
def right(p1, p2, p3):
return direction(p1, p2, p3) > 0
3.3 共线判别
当该方法direction既不返回正值也不返回负值而是返回零时,就会出现一种特殊情况。在这种情况下,所有的点 p 1 p_1 p1, p 2 p_2 p2和 p 3 p_3 p3位于同一条线上。在本例中段 p 2 p 3 p_2p_3 p2p3不转向任何方向。
# checks if p1, p2 and p3 are collinear
def collinear(p1, p2, p3):
return direction(p1, p2, p3) == 0
参考
Cormen, TH、Leiserson, CE、Rivest, RL 和 Stein, C.(nd)。算法简介(第三版)。麻省理工学院出版社。