目录
1.函数作用
2.code
3.函数解析
1.函数作用
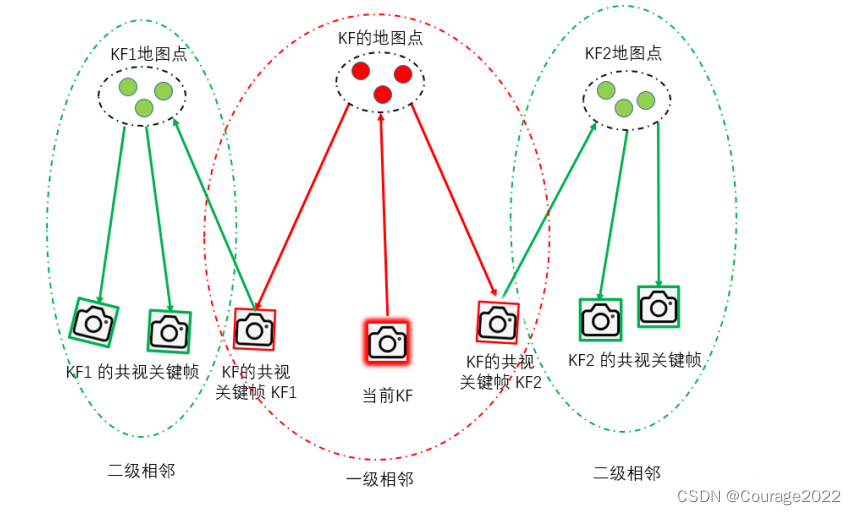
检测当前关键帧在共视图中的关键帧,根据地图点在共视图中的冗余程度剔除该共视关键帧。
冗余关键帧的判定:90%以上的地图点能被其他关键帧(至少3个)观测到。
2.code
/** * @brief 检测当前关键帧在共视图中的关键帧,根据地图点在共视图中的冗余程度剔除该共视关键帧 * 冗余关键帧的判定:90%以上的地图点能被其他关键帧(至少3个)观测到 */ void LocalMapping::KeyFrameCulling() { // 该函数里变量层层深入,这里列一下: // mpCurrentKeyFrame:当前关键帧,本程序就是判断它是否需要删除 // pKF: mpCurrentKeyFrame的某一个共视关键帧 // vpMapPoints:pKF对应的所有地图点 // pMP:vpMapPoints中的某个地图点 // observations:所有能观测到pMP的关键帧 // pKFi:observations中的某个关键帧 // scaleLeveli:pKFi的金字塔尺度 // scaleLevel:pKF的金字塔尺度 // Step 1:根据共视图提取当前关键帧的所有共视关键帧 vector<KeyFrame*> vpLocalKeyFrames = mpCurrentKeyFrame->GetVectorCovisibleKeyFrames(); // 对所有的共视关键帧进行遍历 for(vector<KeyFrame*>::iterator vit=vpLocalKeyFrames.begin(), vend=vpLocalKeyFrames.end(); vit!=vend; vit++) { KeyFrame* pKF = *vit; // 第1个关键帧不能删除,跳过 if(pKF->mnId==0) continue; // Step 2:提取每个共视关键帧的地图点 const vector<MapPoint*> vpMapPoints = pKF->GetMapPointMatches(); // 记录某个点被观测次数,后面并未使用 int nObs = 3; // 观测次数阈值,默认为3 const int thObs=nObs; // 记录冗余观测点的数目 int nRedundantObservations=0; int nMPs=0; // Step 3:遍历该共视关键帧的所有地图点,其中能被其它至少3个关键帧观测到的地图点为冗余地图点 for(size_t i=0, iend=vpMapPoints.size(); i<iend; i++) { MapPoint* pMP = vpMapPoints[i]; if(pMP) { if(!pMP->isBad()) { if(!mbMonocular) { // 对于双目或RGB-D,仅考虑近处(不超过基线的40倍 )的地图点 if(pKF->mvDepth[i]>pKF->mThDepth || pKF->mvDepth[i]<0) continue; } nMPs++; // pMP->Observations() 是观测到该地图点的相机总数目(单目1,双目2) if(pMP->Observations()>thObs) { const int &scaleLevel = pKF->mvKeysUn[i].octave; // Observation存储的是可以看到该地图点的所有关键帧的集合 const map<KeyFrame*, size_t> observations = pMP->GetObservations(); int nObs=0; // 遍历观测到该地图点的关键帧 for(map<KeyFrame*, size_t>::const_iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++) { KeyFrame* pKFi = mit->first; if(pKFi==pKF) continue; const int &scaleLeveli = pKFi->mvKeysUn[mit->second].octave; // 尺度约束:为什么pKF 尺度+1 要大于等于 pKFi 尺度? // 回答:因为同样或更低金字塔层级的地图点更准确 if(scaleLeveli<=scaleLevel+1) { nObs++; // 已经找到3个满足条件的关键帧,就停止不找了 if(nObs>=thObs) break; } } // 地图点至少被3个关键帧观测到,就记录为冗余点,更新冗余点计数数目 if(nObs>=thObs) { nRedundantObservations++; } } } } } // Step 4:如果该关键帧90%以上的有效地图点被判断为冗余的,则认为该关键帧是冗余的,需要删除该关键帧 if(nRedundantObservations>0.9*nMPs) pKF->SetBadFlag(); } }
3.函数解析
先获取当前关键帧mpCurrentKeyFrame的一级共视关键帧vpLocalKeyFrames。
对所有的共视关键帧vpLocalKeyFrames进行遍历:
规定第一个关键帧不能删除(初始化的第一帧),提取每个共视关键帧的地图点vpMapPoints(vpLocalKeyFrames的地图点),遍历每一个地图点:
对于双目或RGB-D,仅考虑近处(不超过基线的40倍 )的地图点。
如果该地图点的被观测次数超过阈值thObs,获取能看见该地图点的关键帧的集合observations(map<KeyFrame*, size_t>型遍变量,存储着能观测到该地图点的所有关键帧和该地图点在该关键帧的索引),遍历观测到该地图点的关键帧,其中能被其它至少3个关键帧观测到的地图点为冗余地图点。
如果该关键帧90%以上的有效地图点被判断为冗余的,则认为该关键帧是冗余的,需要删除该关键帧。
ORB-SLAM2 --- KeyFrame::SetBadFlag函数解析
https://blog.csdn.net/qq_41694024/article/details/128570430