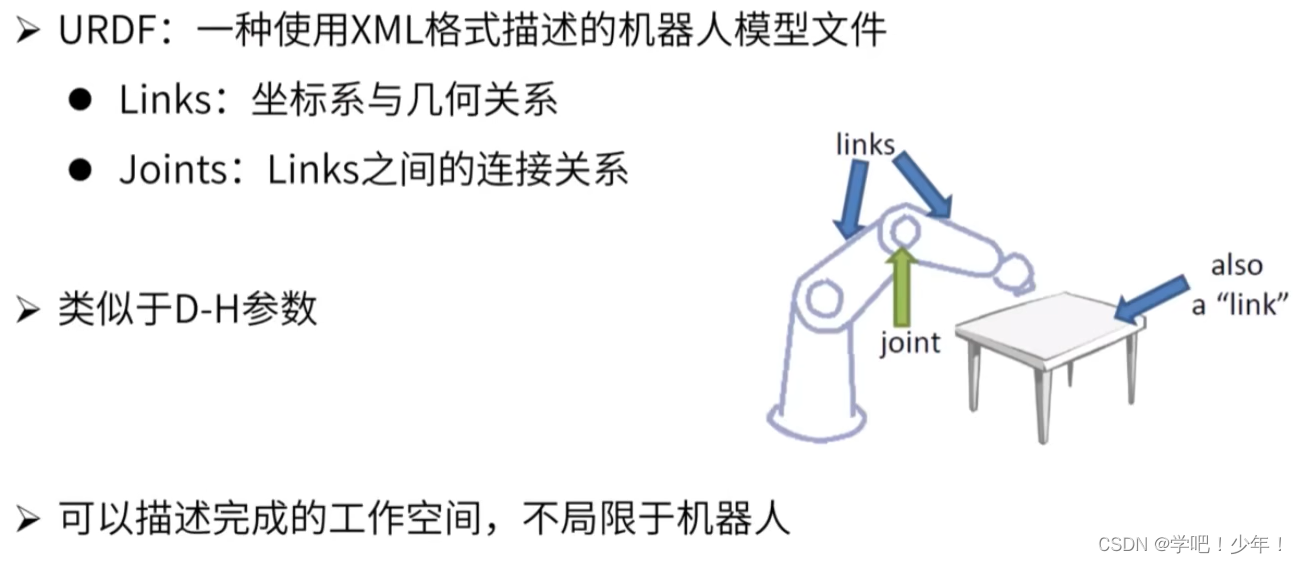
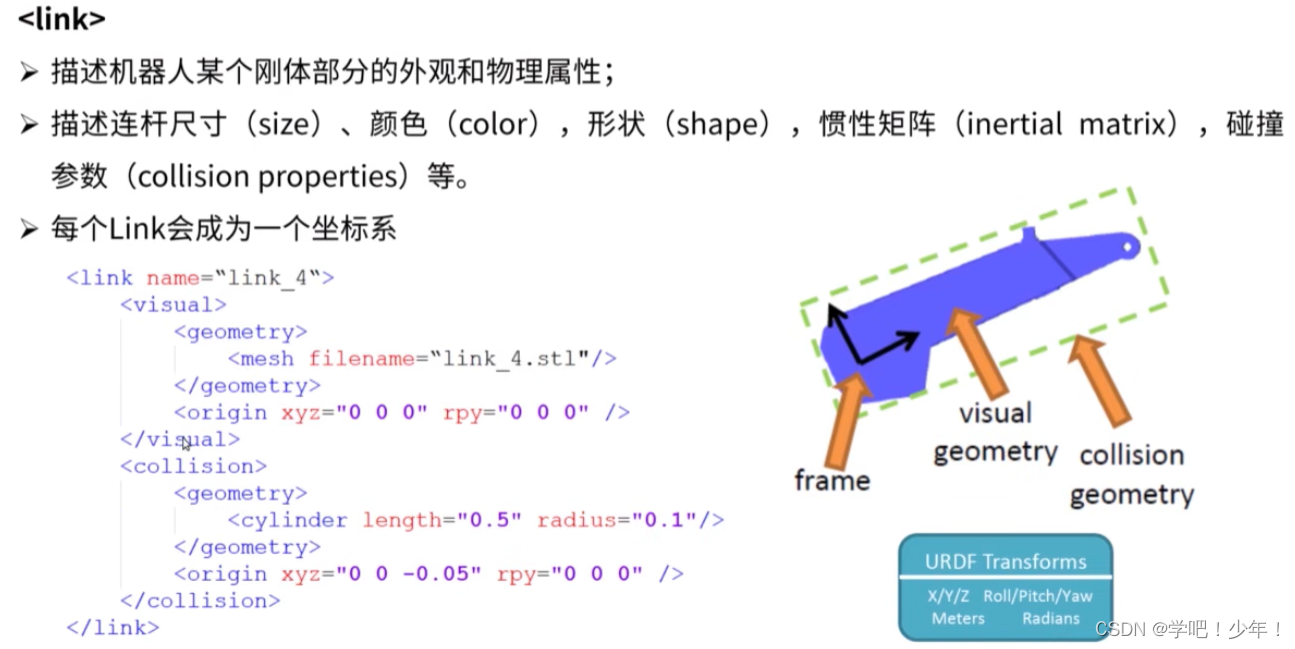
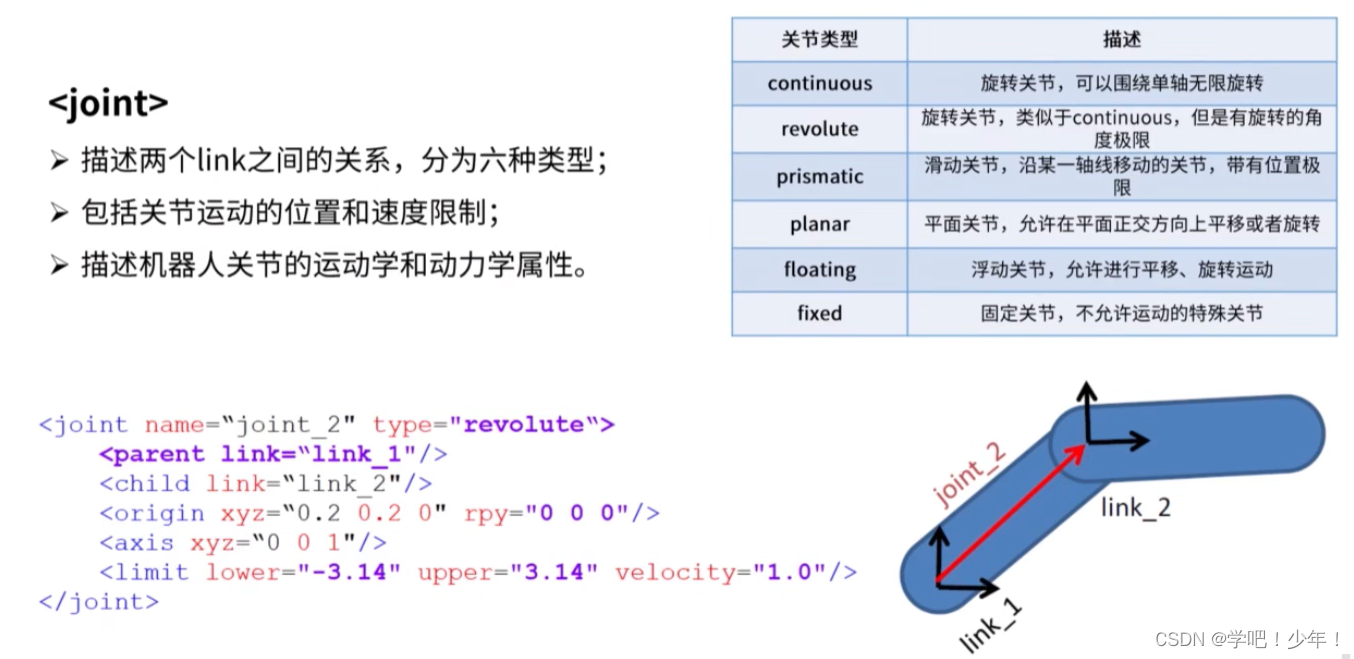
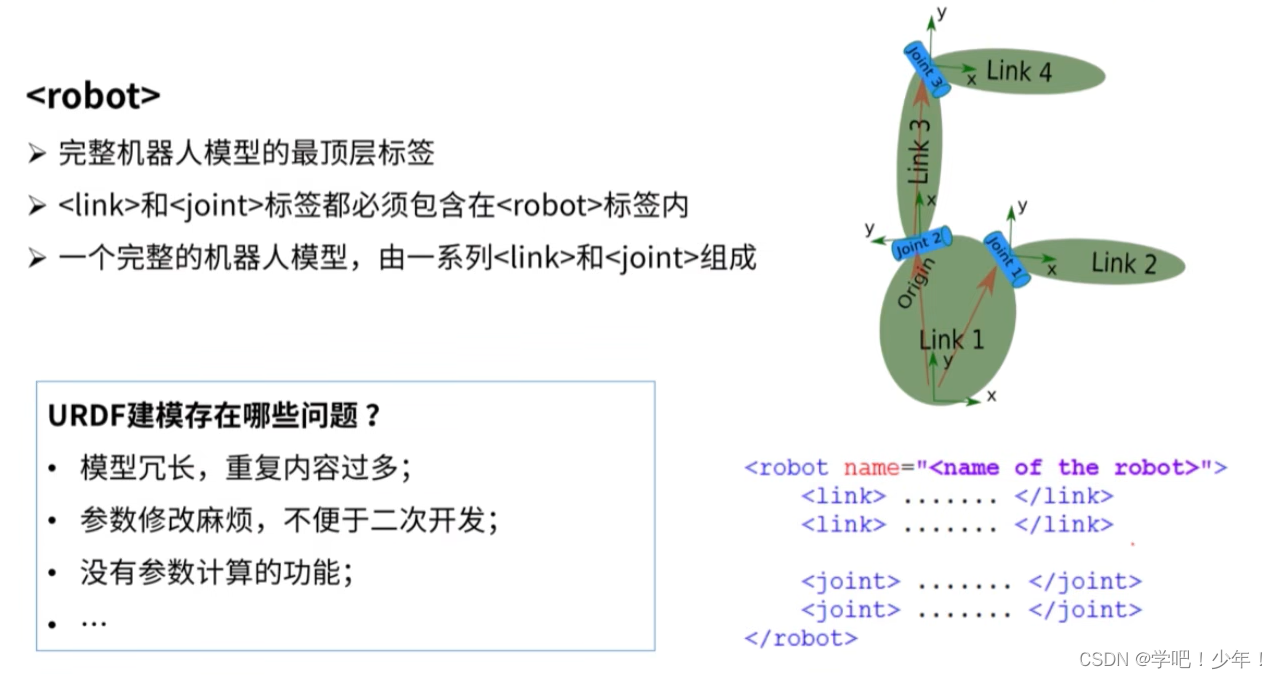
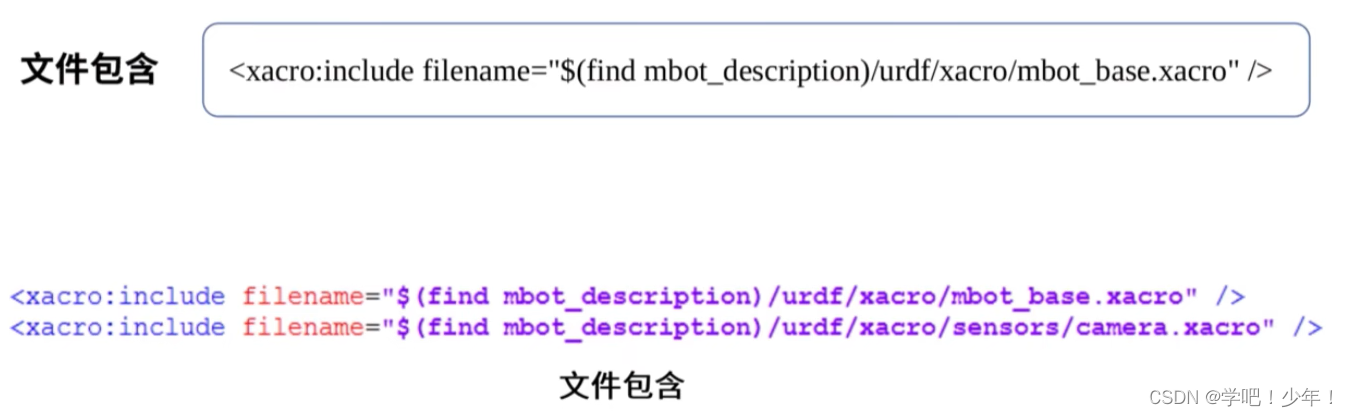
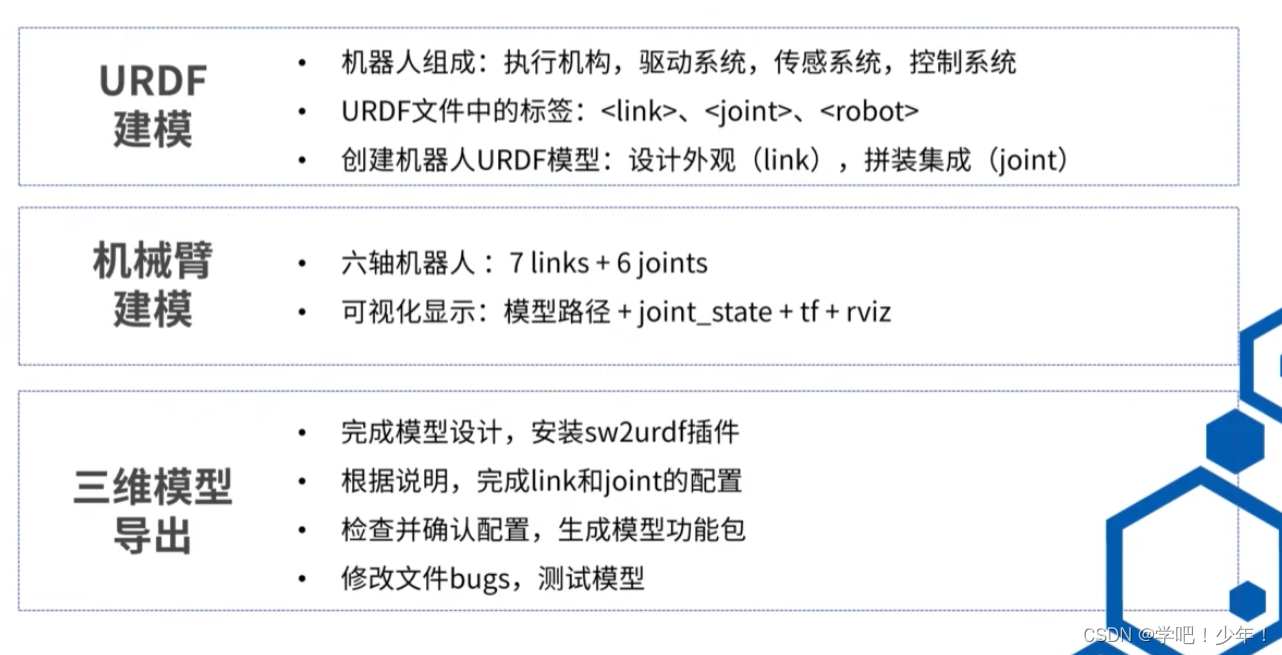
1.URDF建模原理

2.机械臂URDF建模
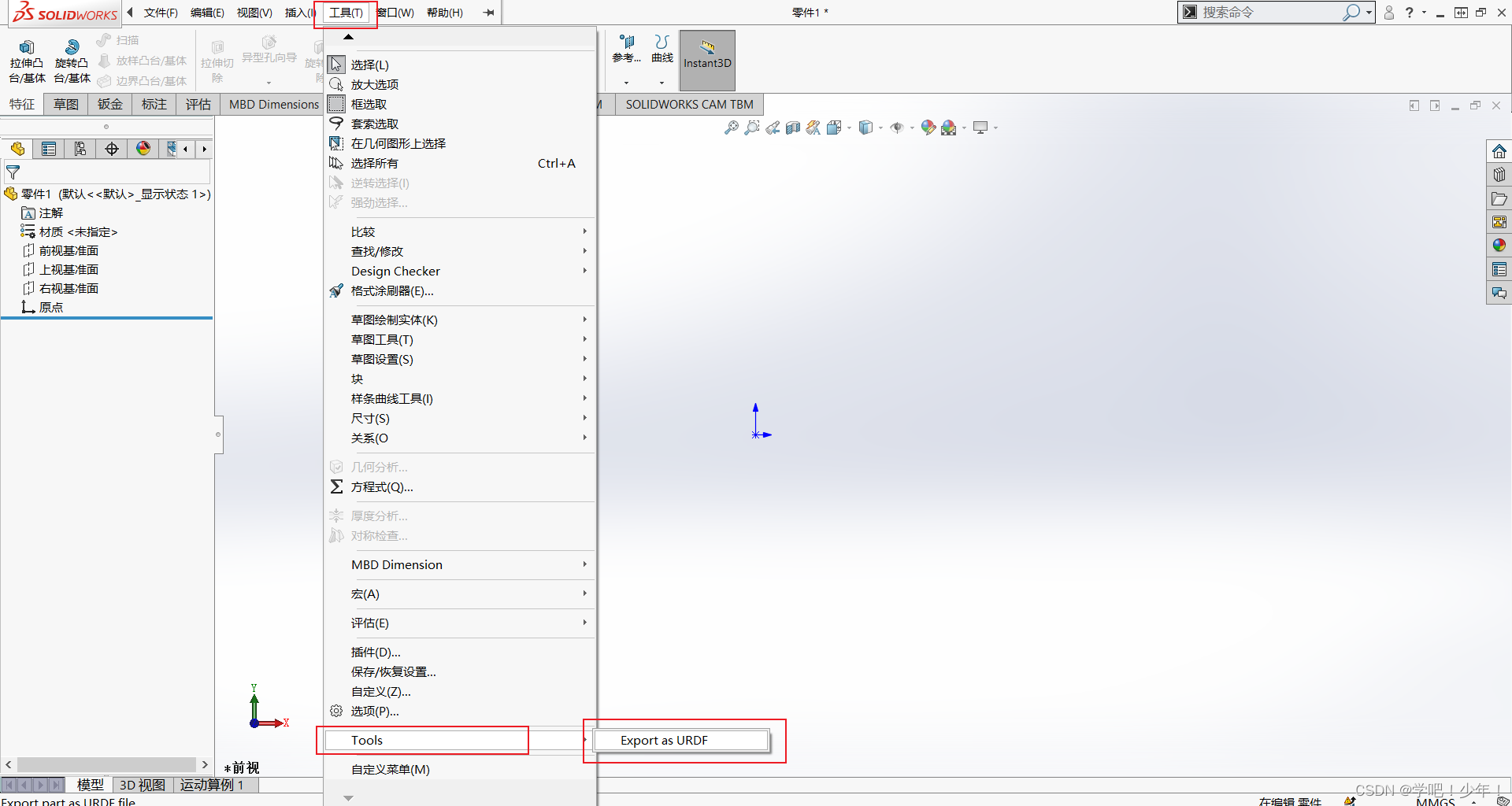
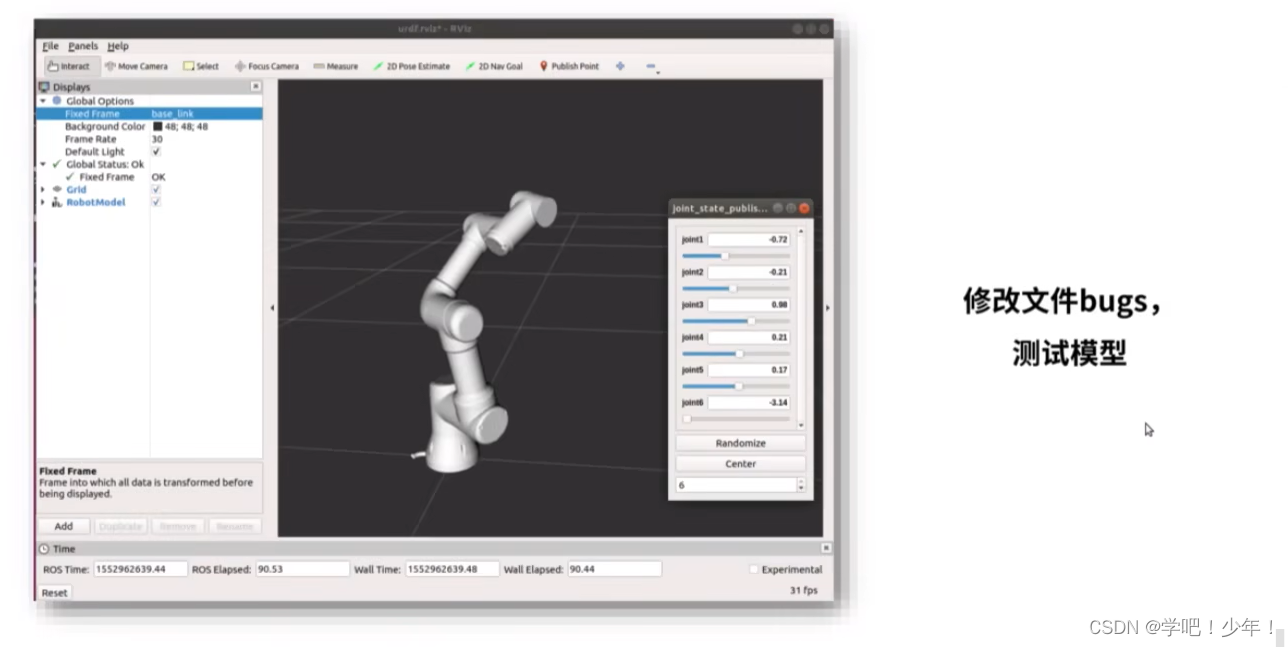
3.三维模型导出URDF
第一步:下载三维模型,并给每个关节设置旋转轴(基准轴)
第二部:下载 SolidWorks to URDF Exporter 插件
网址:sw_urdf_exporter - ROS Wiki
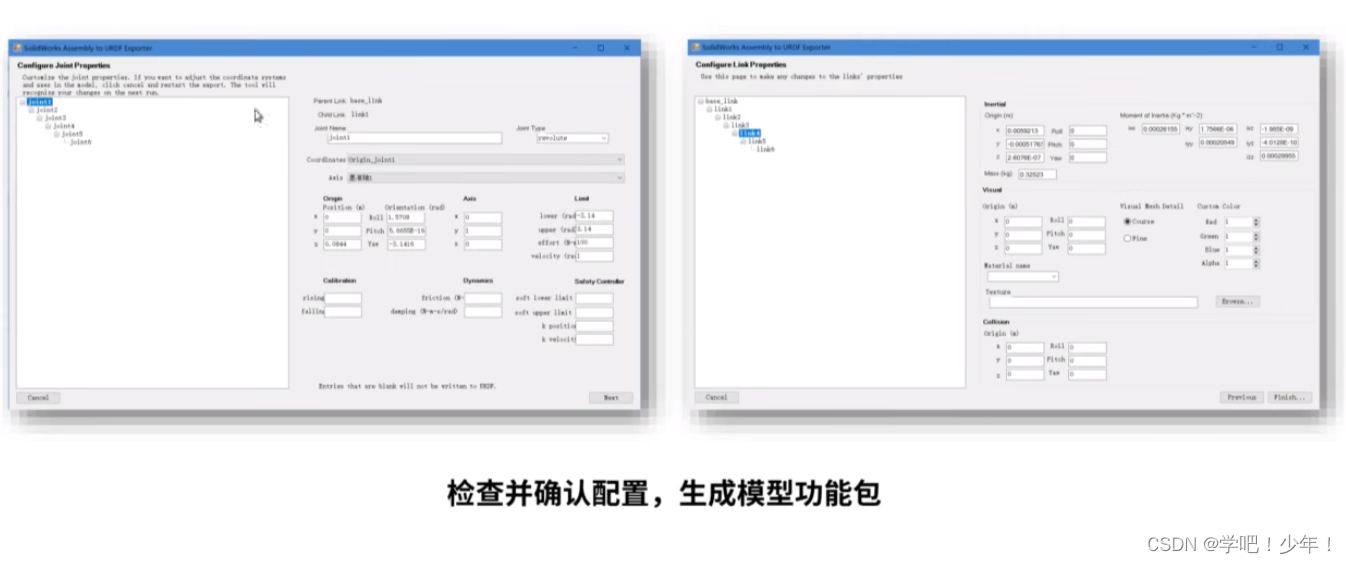
第三步:配置 SolidWorks 模型为 URDF
4.总结

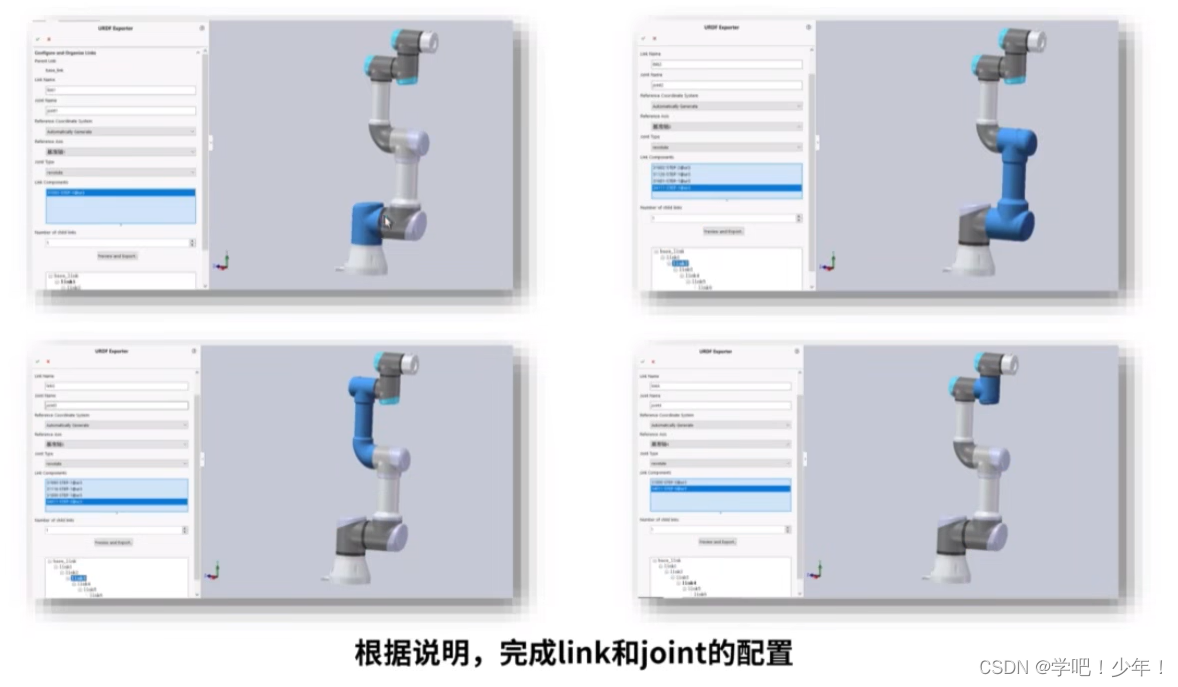
第一步:下载三维模型,并给每个关节设置旋转轴(基准轴)
第二部:下载 SolidWorks to URDF Exporter 插件
网址:sw_urdf_exporter - ROS Wiki
第三步:配置 SolidWorks 模型为 URDF
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1431001.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!



![[机器学习]LFM梯度下降算法](https://img-blog.csdnimg.cn/direct/aa6c295d2beb4186bbe2ff5d40327929.png)