- 摘要
在海洋探险和搜救领域,潜水器的定位和搜救任务具有重要意义。本文旨在开发一系列模型来预测潜水器位置、分析不确定性、确定信息传递策略、建议搜索设备以及优化搜索模式。
对于任务1,我们建立了潜水器的定位模型。考虑到海洋环境中的复杂因素和潜水器可能遭遇的机械故障,我们使用了数值方法来模拟潜水器的运动过程,并预测其位置。通过对环境因素和机械故障的综合考虑,我们能够更准确地预测潜水器的位置。
在任务2中,我们进行了不确定性分析。通过统计方法和蒙特卡罗模拟,我们量化了预测结果的不确定性,并提高了预测的可靠性。这使得决策者能够更好地理解预测结果的可信度,从而采取相应的行动。
针对任务3,我们确定了潜水器向主船发送信息的策略。潜水器可以定期向主船发送关键信息,如位置报告、环境状况报告和电池状态报告,以确保及时的沟通和监控。
在任务4中,我们提出了搜索设备建议。综合考虑搜救需求、海洋环境和设备性能,我们给出了适合搜救任务的搜索设备建议。这些设备包括侧扫声纳、多波束测深仪、潜水器追踪器等,可以提高搜救效率。
任务5涉及搜索模式优化。我们使用优化算法确定了最佳搜索模式和设备部署方案,以最大限度地缩短定位丢失潜水器的时间,并计算了找到潜水器的概率。这使得搜救行动更加高效和可靠。
在任务6中,我们考虑了模型的扩展性,以支持多目的地或多潜水器情景。通过调整模型参数和增加状态变量,我们能够考虑多个目的地或多个潜水器之间的交互影响。然后,我们可以利用相应的算法来求解扩展后的模型,如多目标优化算法或多智能体系统建模方法等。这使得我们能够更好地应对复杂的海洋探险和搜救任务,提高搜救效率和成功率。
最后,我们总结了各模型的优缺点。定位模型能够准确预测潜水器位置,但对海洋环境和机械故障的模拟存在一定局限性。不确定性分析提高了预测结果的可靠性,但计算量较大。潜水器发送信息的策略和搜索设备建议提高了搜救效率,但依赖设备的可靠性和稳定性。搜索模式优化减少了搜索时间,但需要合理的模型假设和算法。综上所述,这些模型为海洋探险和搜救提供了重要参考,但仍有进一步改进的空间。
目录
一、 摘要... 1
二、 问题重述... 2
三、 问题分析... 2
3.1.1 任务1:定位模型开发... 2
3.1.2 任务2:不确定性分析... 3
3.1.3 任务3:潜水器向主船发送信息... 3
3.1.4 任务4:搜索设备建议... 3
3.1.5 任务5:搜索模式优化... 3
3.1.6 任务6:模型扩展... 4
四、 模型假设... 4
4.1.1 任务1:定位模型开发... 4
4.1.2 任务2:不确定性分析... 4
4.1.3 任务3:潜水器向主船发送信息... 4
4.1.4 任务4:搜索设备建议... 5
4.1.5 任务5:搜索模式优化... 5
4.1.6 任务6:模型扩展... 5
五、 符号说明... 5
六、 模型的建立和求解... 6
6.1 任务一定位模型的建立和求解... 6
6.1.1 任务1:定位模型... 6
6.1.2 水平方向上的位置... 6
6.1.3 垂直方向上的位置... 7
6.1.4 海洋密度的影响... 7
6.1.5 海底地理的影响... 8
6.2 任务二预测相关的不确定性模型的建立... 9
6.3 任务三减少不确定性模型的建立与求解... 10
6.4 任务四搜索设备配备模型的建立... 12
6.4.1 主船搜索设备... 12
6.4.2 救援船额外设备... 12
6.5 任务五初始部署点和搜索模式模型的建立和求解... 13
6.5.1 模型步骤... 13
6.5.2 数学模型... 13
6.5.3 求解算法描述... 14
6.5.4 模型的求解... 14
6.6 任务六扩展模型的建立和求解... 16
6.6.1 多目的地模型... 17
6.6.2 多潜水器情景... 20
七、 模型的评价... 23
7.1.1 任务1:定位模型开发... 23
7.1.2 任务2:不确定性分析... 24
7.1.3 任务3:潜水器向主船发送信息... 24
7.1.4 任务4:搜索设备建议... 25
7.1.5 任务5:搜索模式优化... 25
7.1.6 任务6:模型扩展... 26
总部位于希腊的MCMS公司生产能够载人到海洋最深处的潜水器。潜水器被移动到该位置并从主船上解缆部署。MCMS现在希望用他们的潜水器带领游客在爱奥尼亚海海底探险,寻找沉没的沉船。
然而,在这样做之前,他们需要通过制定安全程序来赢得监管机构的批准,以防与主船失去通信以及可能出现的机械故障,包括潜水器失去推进力。特别是,他们希望您开发一个模型来预测潜水器的位置。与陆地或海面上的典型搜救不同,有缺陷的潜水器可能会发现自己位于海底或水下的某个中性浮力点。它的位置还可能受到海流、不同的海洋密度和/或海底地理的影响。您的任务是:
· 定位-开发一个模型来预测潜水器的位置。
o 与这些预测相关的不确定性是什么?
o 在事故发生之前,潜水器可以定期向主船发送哪些信息来减少这些不确定性?潜水器需要什么样的设备才能做到这一点?
· 准备-如果有必要,你会建议公司在主船上配备哪些额外的搜索设备?您可以考虑不同类型的设备,但也必须考虑与该设备的可用性、维护、就绪性和使用相关的成本。如有必要,救援船可能需要带什么额外设备来协助救援?
· 搜索-开发一个模型,该模型将使用来自您的位置模型的信息来推荐设备的初始部署点和搜索模式,以便最大限度地缩短定位丢失潜水器的时间。根据时间和累计搜索结果确定找到潜水器的概率。
· 外推-如何扩展您的模型以考虑其他旅游目的地,如加勒比海?你的模型将如何改变,以解释在同一附近移动的多个潜水器?
以下是对任务1到任务6的简要问题分析:
任务1:定位模型开发
问题分析: 任务要求开发一个模型来预测潜水器的位置。这需要考虑多个因素,包括潜水器的初始位置、海洋环境(如海流、海洋密度)以及潜水器可能遇到的机械故障(如失去推进力)等因素。
求解过程: 我们可以使用数学模型来描述潜水器的运动状态,并考虑环境因素对其位置的影响。然后,可以利用数值方法或仿真来模拟潜水器的运动过程,并预测其位置。
任务2:不确定性分析
问题分析: 任务要求分析与预测潜水器位置相关的不确定性。这可能涉及到潜水器初始位置的不确定性、环境因素的不确定性以及传感器测量误差等。
求解过程: 我们可以通过统计方法或蒙特卡罗模拟来分析不确定性。例如,可以使用概率分布描述不确定性,并利用蒙特卡罗模拟来模拟多次实验以估计位置预测的不确定性。
任务3:潜水器向主船发送信息
问题分析: 任务要求确定潜水器可以定期向主船发送哪些信息以减少不确定性,并讨论所需设备。
求解过程: 我们需要确定潜水器可以发送的关键信息,例如位置报告、环境状况报告、电池状态报告等。然后,我们可以确定所需的设备,如GPS 接收器、传感器套件、电池监控系统和通信设备等。
任务4:搜索设备建议
问题分析: 任务要求提出主船上额外搜索设备的建议,并考虑设备的可用性、维护、成本等因素。此外,还需要讨论救援船可能需要的额外设备。
求解过程: 我们需要根据搜救需求和海洋环境特点提出搜索设备的建议,包括侧扫声纳、多波束测深仪、潜水器追踪器、水下摄像机等。对于救援船,可能需要潜水员装备、水下摄像机和探照灯、浮标和标志物、救生艇和救生筏等设备。
任务5:搜索模式优化
问题分析: 任务要求开发一个模型来推荐搜索设备的初始部署点和搜索模式,以最大限度地缩短定位丢失潜水器的时间,并计算找到潜水器的概率。
求解过程: 我们可以使用优化方法来确定搜索设备的最佳部署点和搜索模式,以最小化搜索时间。这可能涉及到数学优化算法,如遗传算法、粒子群优化等。然后,可以利用概率模型来计算找到潜水器的概率。
任务6:模型扩展
问题分析: 任务要求扩展模型以考虑其他旅游目的地或多个潜水器的情况。这需要调整现有模型,并考虑多个目的地或潜水器之间的交互影响。
求解过程: 我们需要修改现有模型以支持多目的地或多潜水器的情况。这可能涉及到调整模型参数、增加状态变量等。然后,可以利用相应的算法来求解扩展后的模型,如多目标优化算法或多智能体系统建模方法等。
以下是对任务1到任务6的分析求解过程中使用到的模型假设的总结:
任务1:定位模型开发
模型假设:
假设潜水器的运动是连续的,即在给定时间段内可以用连续的数学函数描述。
假设海洋环境(如海流、海洋密度)在整个过程中保持不变。
假设潜水器没有遭遇严重的机械故障,如失去推进力等。
任务2:不确定性分析
模型假设:
假设潜水器初始位置和环境因素的不确定性可以通过概率分布描述。
假设传感器测量误差符合某种已知的分布。
任务3:潜水器向主船发送信息
模型假设:
假设潜水器能够准确获取自身位置、环境状况、电池状态和通信链接状态等信息。
假设潜水器能够可靠地将这些信息传输给主船。
任务4:搜索设备建议
模型假设:
假设搜索设备能够准确地探测到目标。
假设搜索设备能够在海洋环境中可靠运行,并且易于维护和操作。
任务5:搜索模式优化
假设搜索设备的性能和搜索范围是已知的。
假设搜索过程中潜水器的位置信息是可靠的。
任务6:模型扩展
假设多个目的地或多个潜水器之间的交互影响是可以忽略的。
假设扩展后的模型仍然可以通过类似的数学方法求解。
(中间略,完整内容见文末)
任务六扩展模型的建立和求解
为了支持多目的地模型,我们需要对现有模型进行修改和扩展,以便能够同时考虑多个旅游目的地。以下是对模型的修改和扩展:
多目的地定义: 对每个旅游目的地定义其自己的参数,包括搜索区域、潜水器预测位置和搜索设备的初始部署点。
多目的地搜索过程: 对每个目的地单独进行搜索过程模拟,并考虑多个目的地之间的交互影响。
- 多目的地结果合并: 将多个目的地的搜索结果合并,计算整体的找到目标的概率。
对于多目的地模型,我们可以考虑以下修改和扩展:
多目的地定义: 对每个旅游目的地定义其自己的参数,包括搜索区域、潜水器预测位置和搜索设备的初始部署点。
多目的地搜索过程: 对每个目的地单独进行搜索过程模拟,并考虑多个目的地之间的交互影响。
多目的地结果合并: 将多个目的地的搜索结果合并,计算整体的找到目标的概率。
模型公式如下所示:
- 多目的地定义:
令 N
表示旅游目的地的数量。对于每个目的地 i
,定义以下参数:
- (xp,i,zp,i):潜水器预测位置。
- (xs,i,zs,i):搜索设备的初始部署点。
- Ai:目的地 i 的搜索区域。
- 多目的地搜索过程:
对于每个目的地 i
,单独进行搜索过程模拟。在每个目的地的搜索过程中,模拟潜水器的位置和搜索设备的移动,并计算潜水器与搜索设备之间的距离。如果潜水器被找到,则记录搜索结果为 1,否则为 0。
- 多目的地结果合并:
将多个目的地的搜索结果合并,计算整体的找到目标的概率。假设 Si(t)
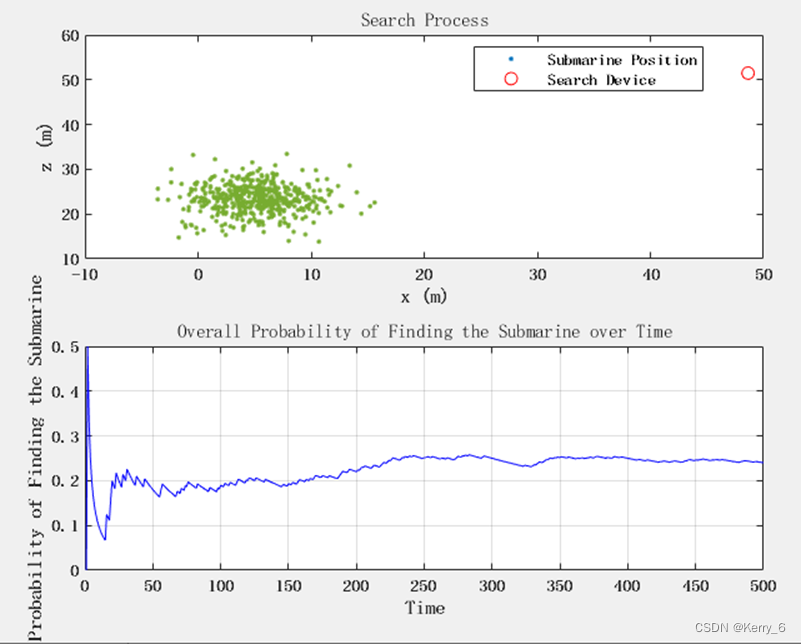
表示在目的地 i中在时间 t时累计的搜索结果,则整体的找到目标的概率 P(t)
可以表示为:

仿真模拟的求解结果如下:
B题完整代码和论文文档:https://docs.qq.com/doc/DZUxsTVRaYnFacFNR



![BUUCTF-Real-[Flask]SSTI](https://img-blog.csdnimg.cn/direct/c1b040e2661644d98e941a639749d7ec.png)