0. Preliminaries
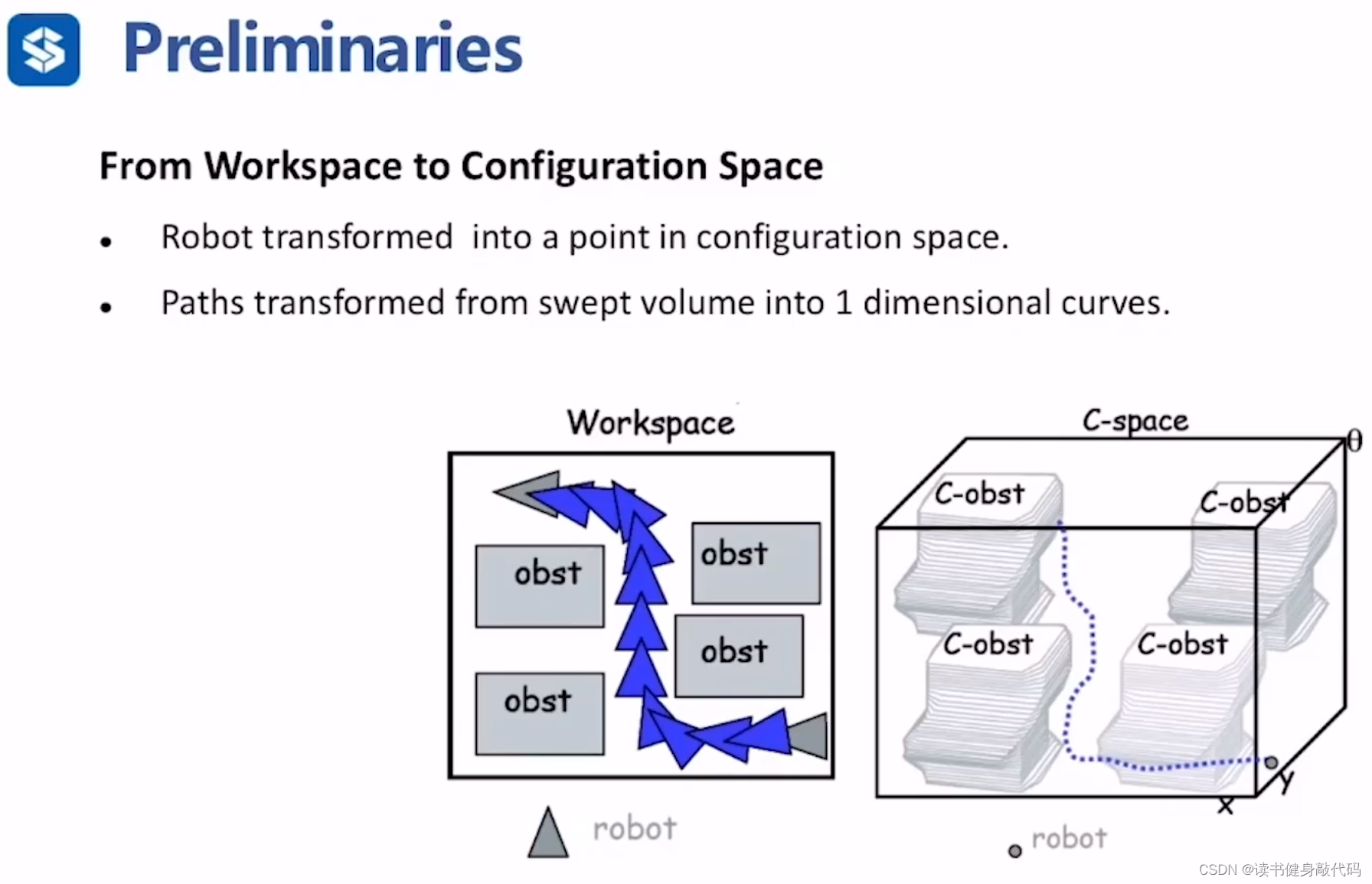
做规划都是将WS转到C space下进行。
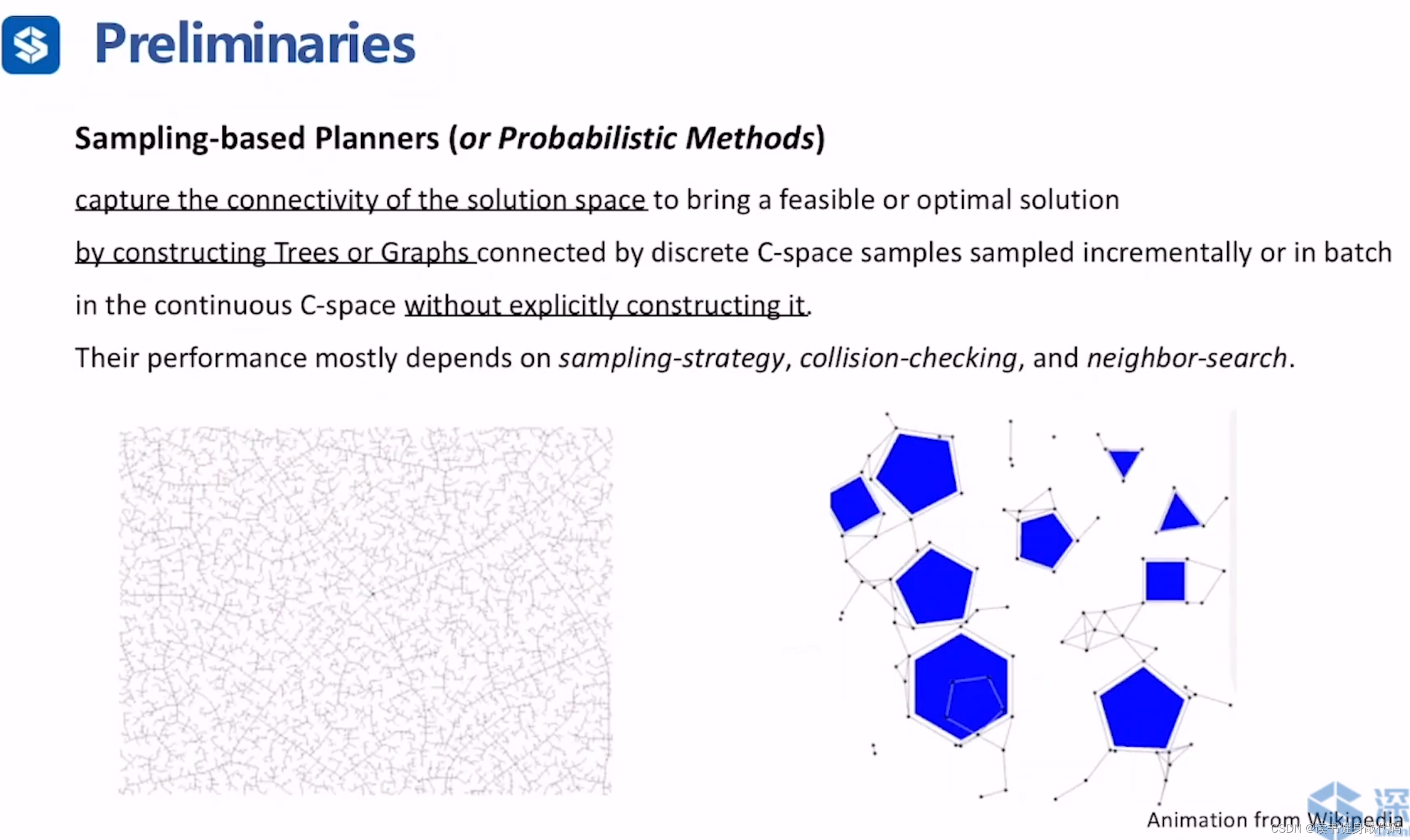
找到可行解和最优解(这两个不同)
通过增量或者批次地在C-space中采样来增量式地构建树或者图。
不显式地构造
如果把整个规划问题看成一个大的优化问题,那么大问题可以拆分成小问题进行求解。
整个规划问题可以分为两个基本的tasks:Explotration和Exploitation
Explotration目的是获取搜索空间中的拓扑信息,即尽可能地把树给更多地长出来
Exploitation目的是使用Explotration过程中获得的信息来增量式地优化解,即优化树的拓扑结构。
Probabilistic Completeness概率完备:是对可行解而言,即如果一个解是可行的,则我们随着我们采样的进行,我们一定能够找到它。
Asymptotical Optimality渐进最优:针对最优解而言,随着采样的次数趋近于无穷为,我们找到最优解的概率会趋近于1
即时性Anytime:我们能够很快地找到可行解(但),随着计算资源的投入我们能够找到更优的解。
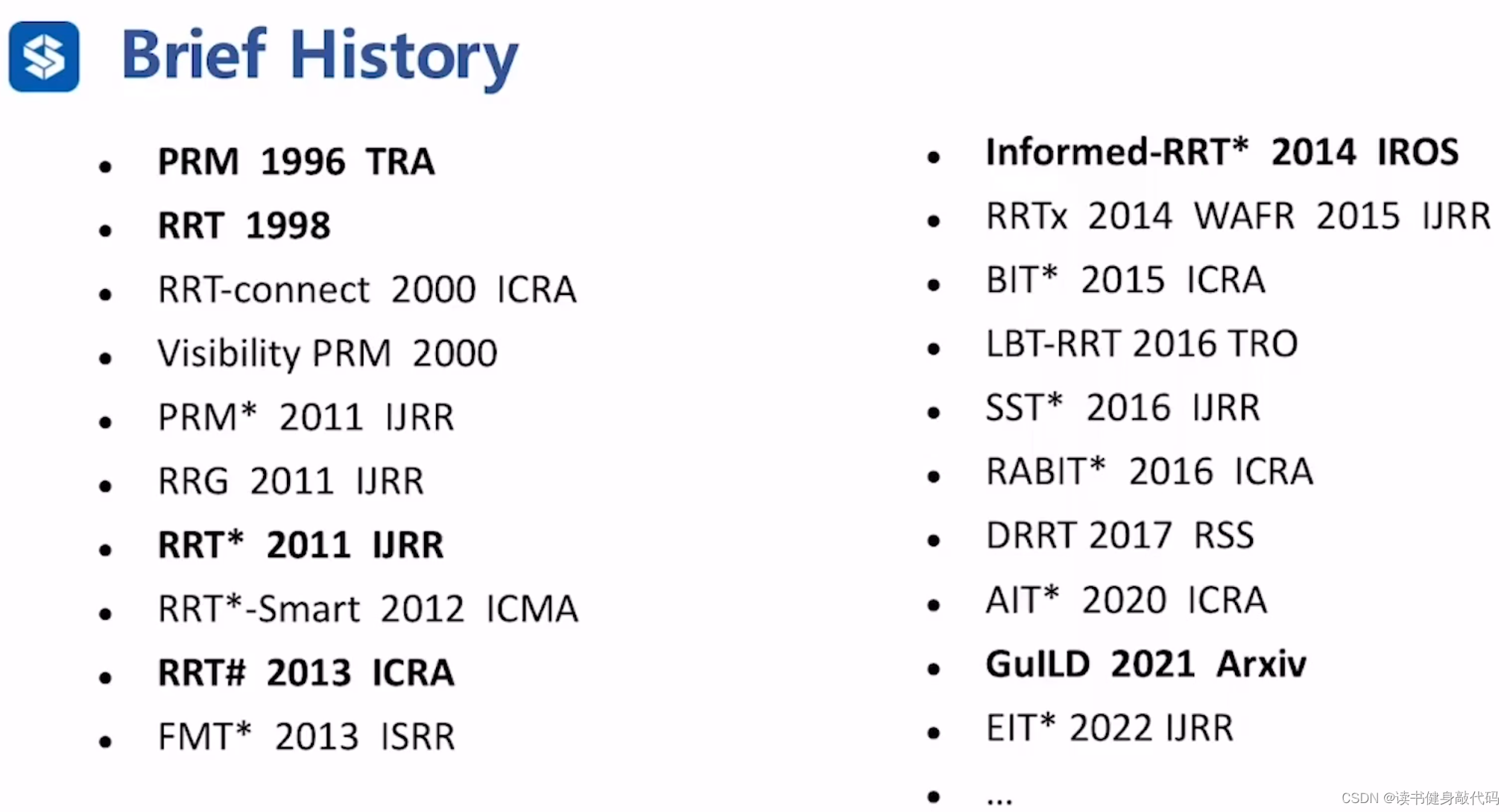
采样类算法的发展时间,和给予搜索的规划算法不同,采样类算法是近20年才发展起来的(有些令人惊讶),而如A*这类算法是上世纪50,60年代发展的。
本章内容:
分别讲可行解,最优解,加速收敛的算法(很多都是基于RRT*发展而来)。
1. Feasiable path planning methods
1. PRM(概率路线图)
1.1.1 PRM
PRM是一种概率完备(probabilistically complete)的算法,意味着随着采样数量的增加,找到一条路径(如果存在的话)的概率趋近于1。然而,它并不保证找到的是最优路径,也不是确定完备的,即它不保证总是在有限的时间内找到解决方案。
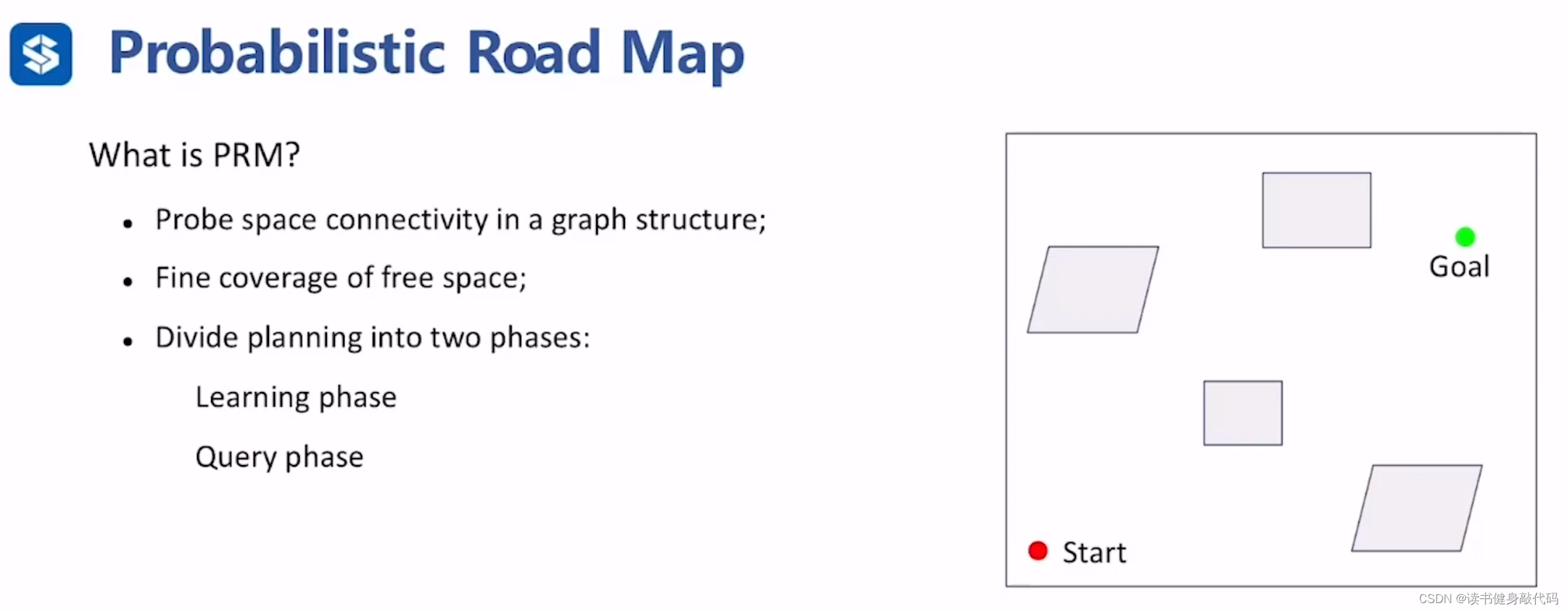
得到一个图的结构来探索解空间的连续性;
希望很好地去覆盖解空间;
分为两个阶段:learning phase(构建图的过程),query phase(在图的基础上进行搜索得到解)
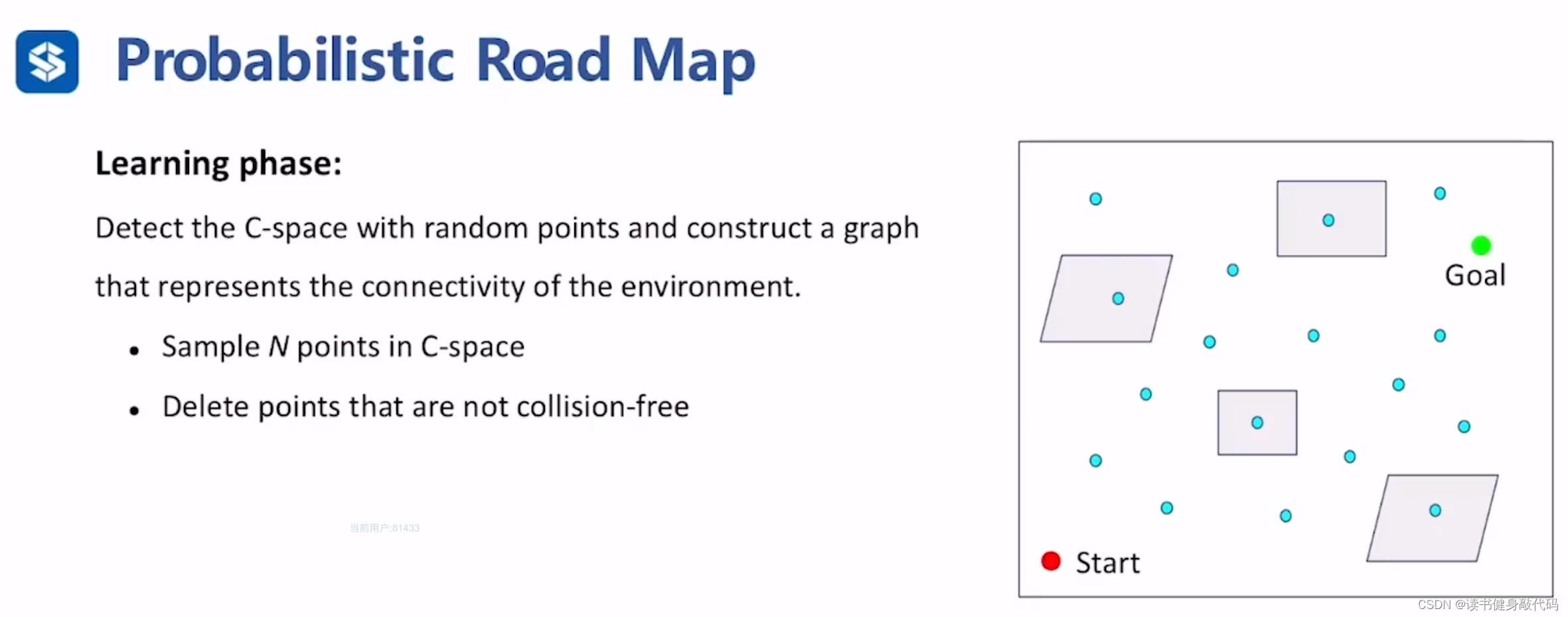
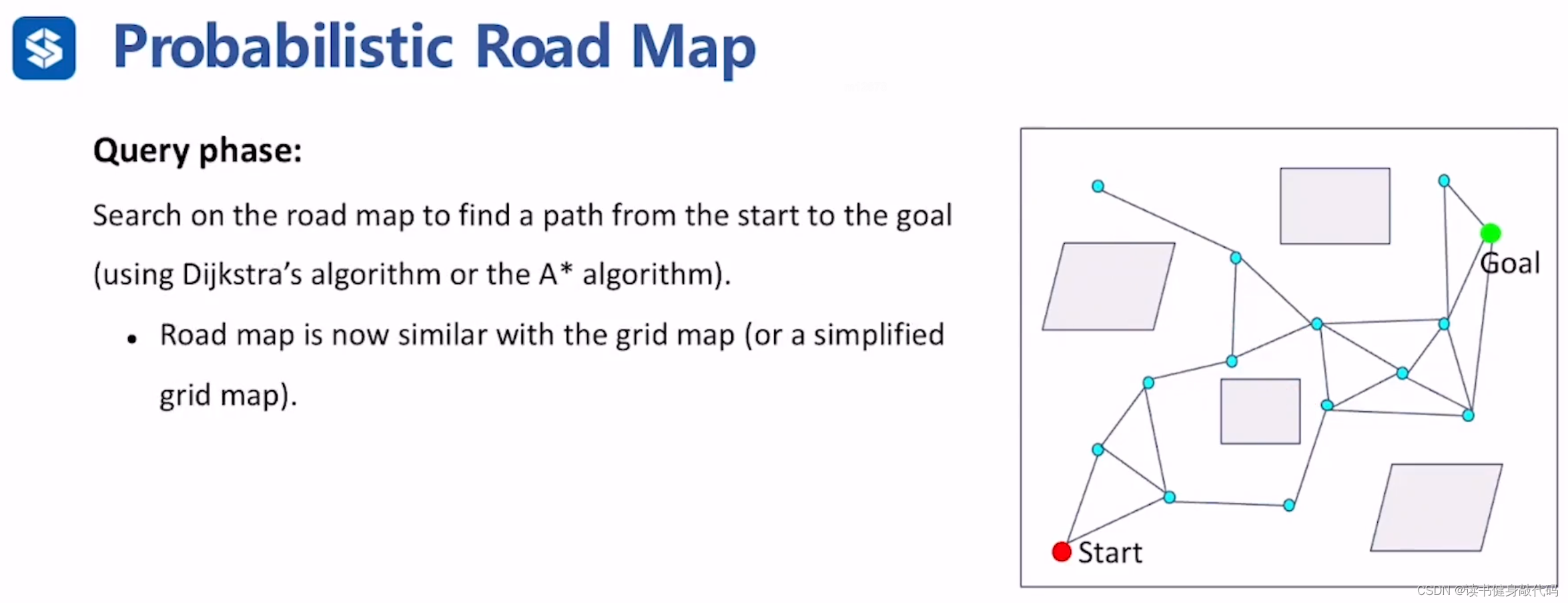
Learning phase
- 在C-space中采样,得到一系列采样点,
- 对采样点进行碰撞检测,delete not collision-free的点,保留collision-free的点
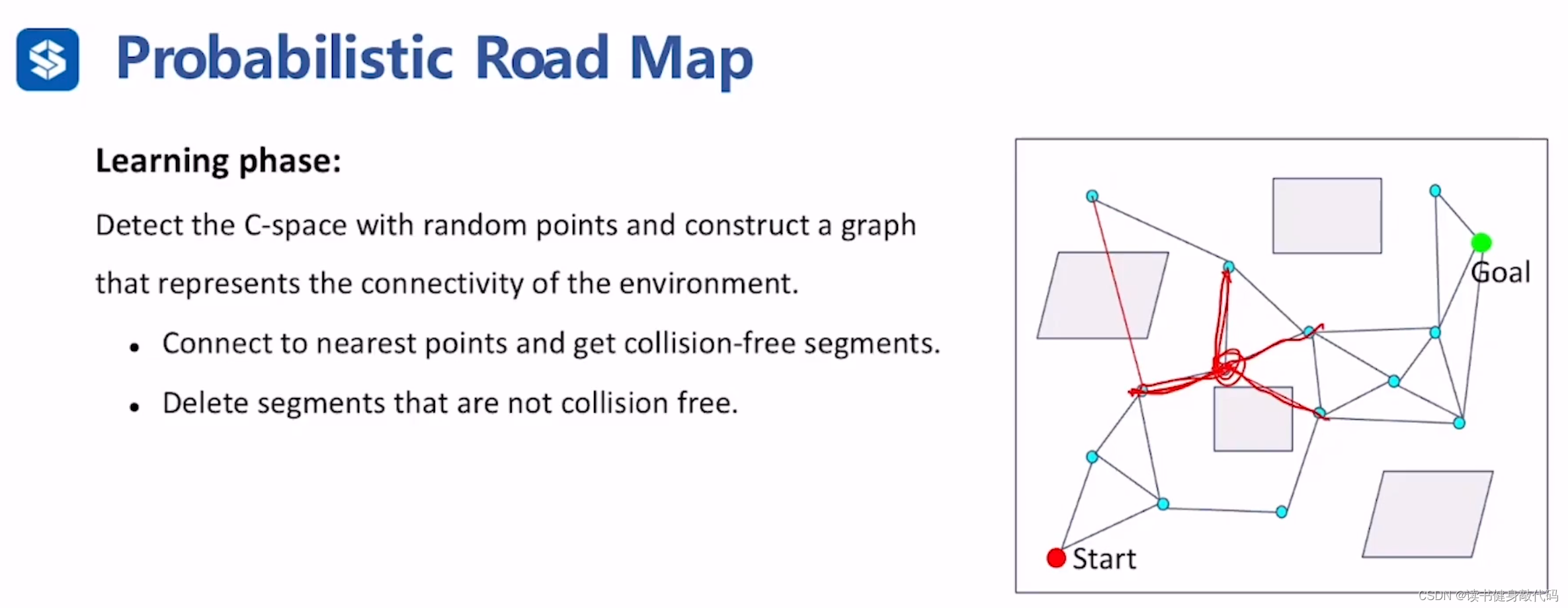
- 找到留下的采样点的领域内的neighbor node,进行连接
- 去掉连接边not collision-free的边
Learning phase结束,得到表征C-Space连通性的、collision-free的图结构,进入query phase,有了图之后就可以使用之前的A*或者Dijkstra来进行搜索了。

优点:由于是静态地图,所以可以进行multiple queries(multiple queries是什么?在什么情况下会使用?)
缺点:基于状态空间建图,不focus on生成某一条特定的path(且环境可能会发生变化,我们有时候只希望找到某条特定解,而不是希望得到整个state space的空间连通性的图,也就是效率低,RRT对此进行了改进)。
1.1.2 Lazy collision-checking
基于以上分析,频繁地进行collision query非常耗时,所以提出了改进Lazy collision-checking(check collision only if necessary)
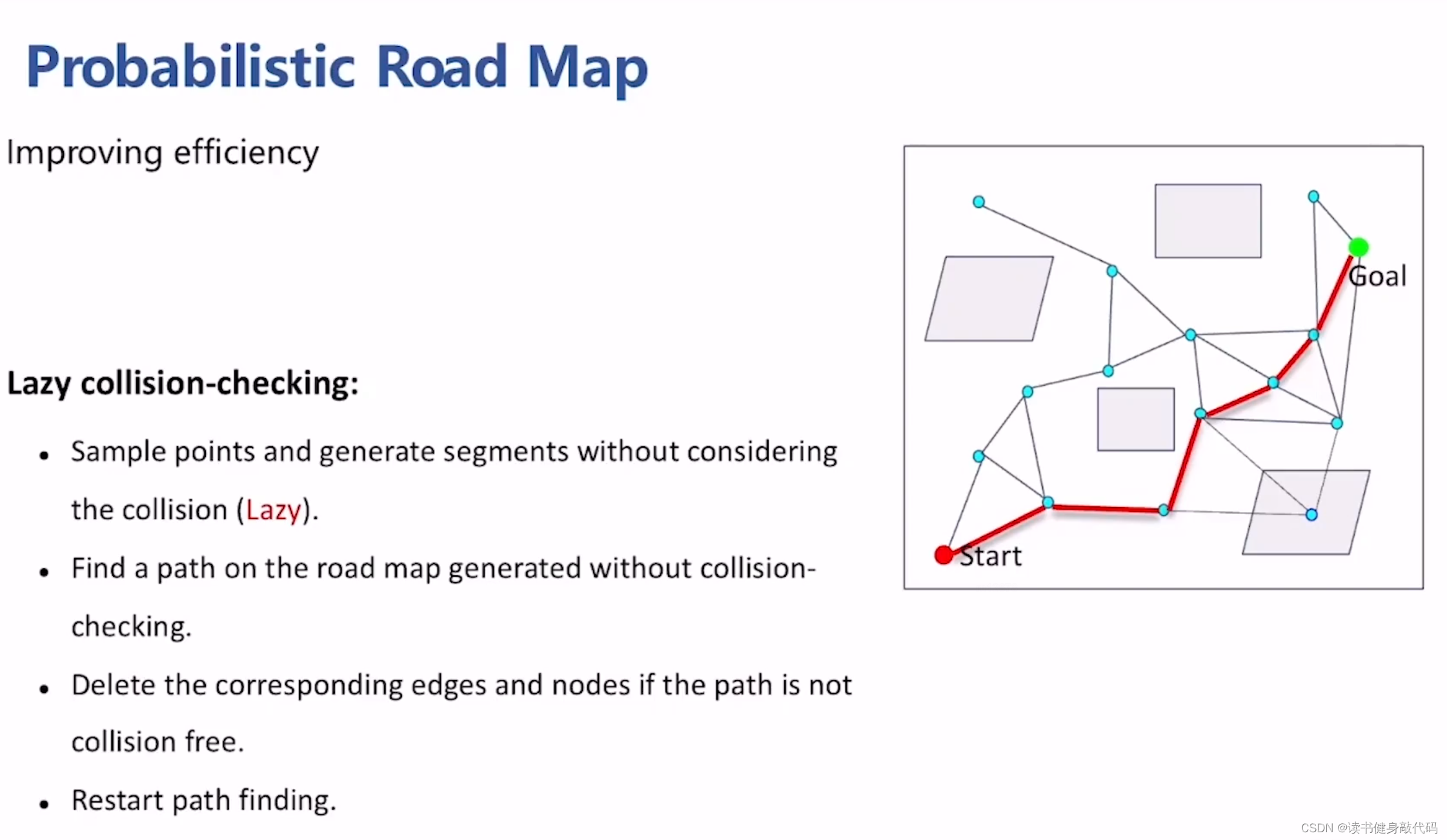
基本思想:
- 采样
- 连接边,但不对边进行check collision
- 在边中找到一条path,
- 对这条path进行collision checking,去掉collision的边,
- 在图上再搜索一条path,重复step4,知道找到一条collision-free的path。
1.2 RRT(快速搜索随机树)
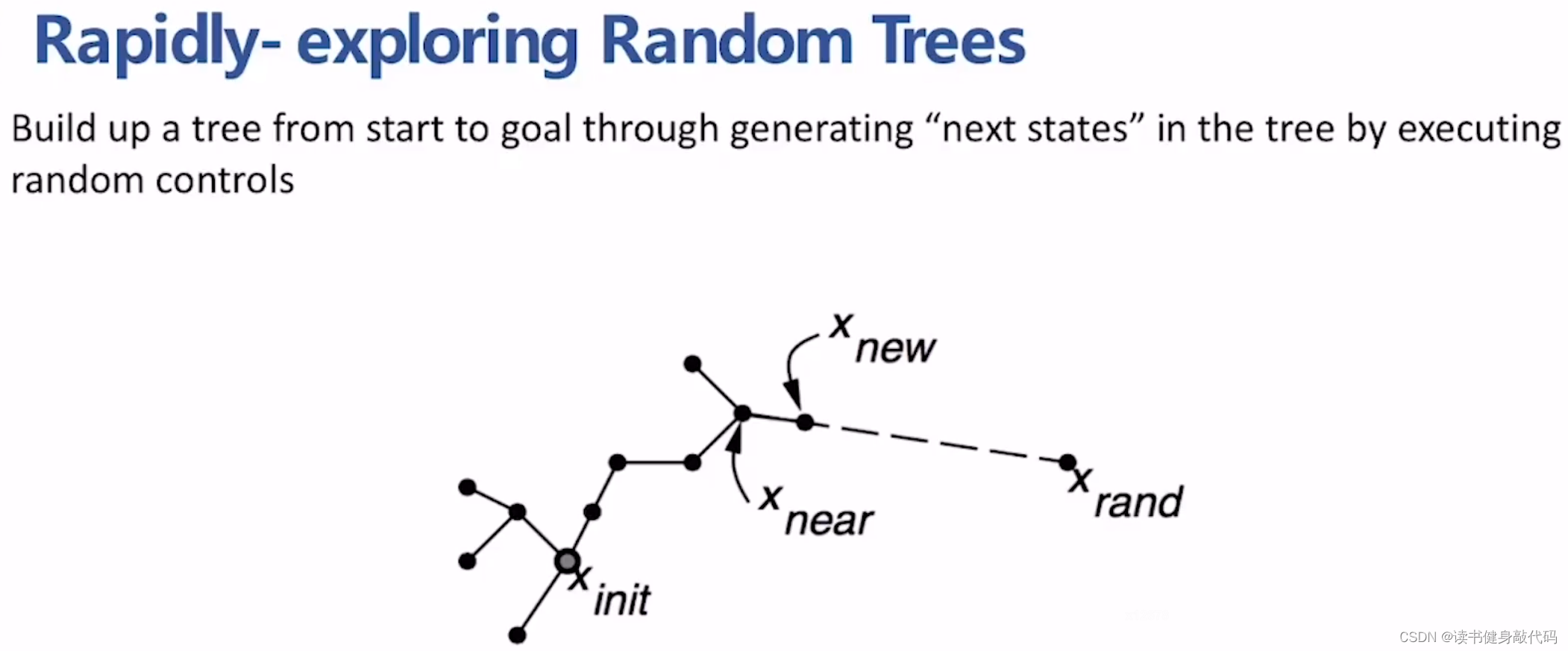
不同于PRM的multi query,RRT是向目标点的方向长出一棵树。
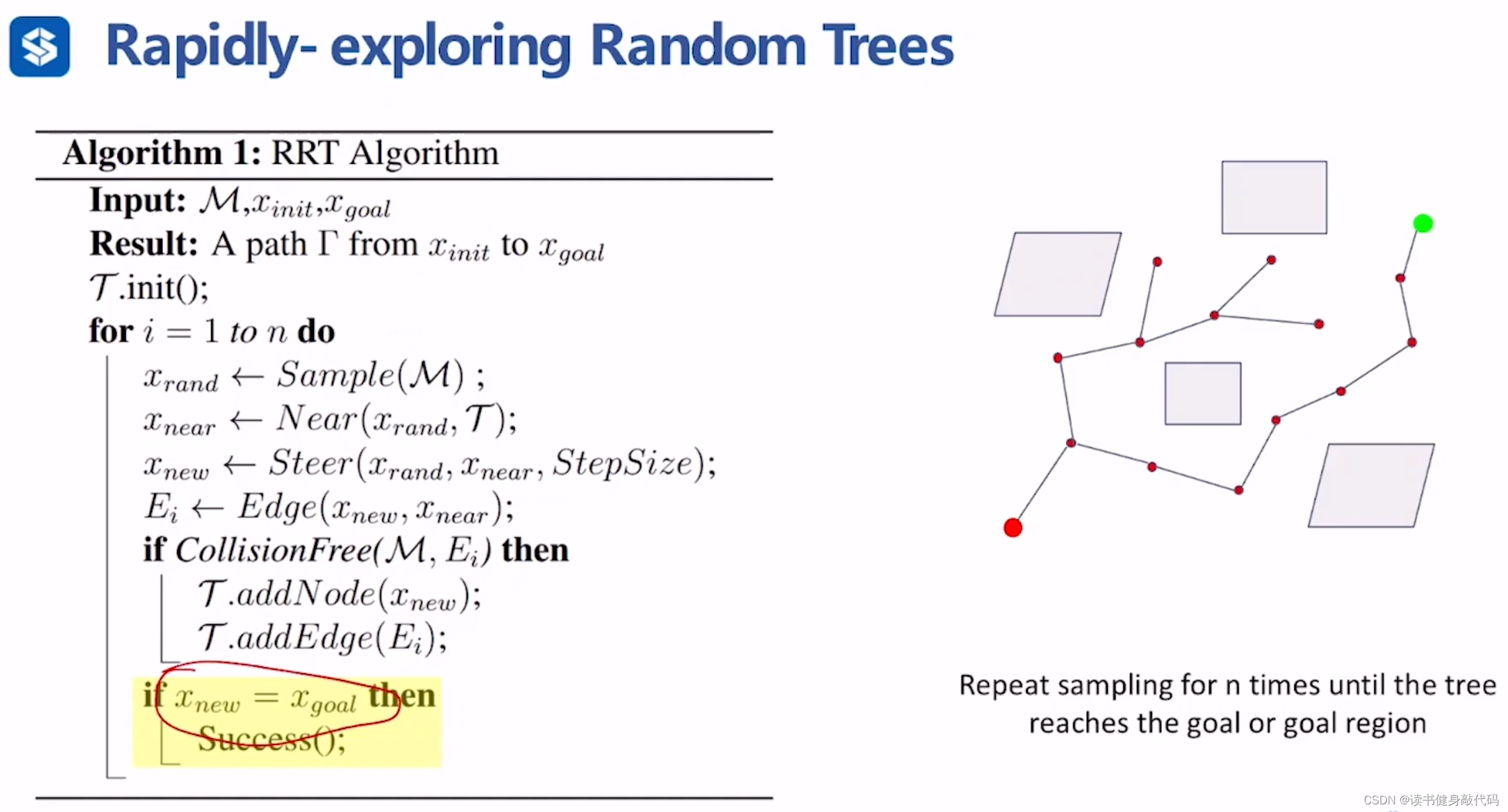
算法流程
- 从起点开始sample,得到collision free的 x n e a r x_{near} xnear
- 以 x n e a r x_{near} xnear为起点,往一个方向采样得到 x n e a r → x r a n d x_{near}\to x_{rand} xnear→xrand方向,在这个方向上取 S t e p S i z e StepSize StepSize的边,进行collision checking:
- 如果是collision-free的,则采用 x n e a r → x r a n d x_{near}\to x_{rand} xnear→xrand这条边,更新, x n e w = x n e a r + S t e p S i z e x_{new}=x_{near} + \bm{StepSize} xnew=xnear+StepSize
- 如果发生collsion则在
x
n
e
a
r
x_{near}
xnear基础上重新sample获得
x
r
a
n
d
x_{rand}
xrand
循环step2,直到找到 x g o a l x_{goal} xgoal,找到条件 for example, x n e a r x_{near} xnear距离 x g o a l x_{goal} xgoal小于某个阈值,则认为找到了 x g o a l x_{goal} xgoal。
可以用ZJU-FAST-LAB的这个工作来仿真:https://github.com/ZJU-FAST-Lab/sampling-based-path-finding
里面的代码有些旧的地方需要改一下才能编过,要改的地方不多,比如把boost::shared_ptr改成std::shared_ptr等。
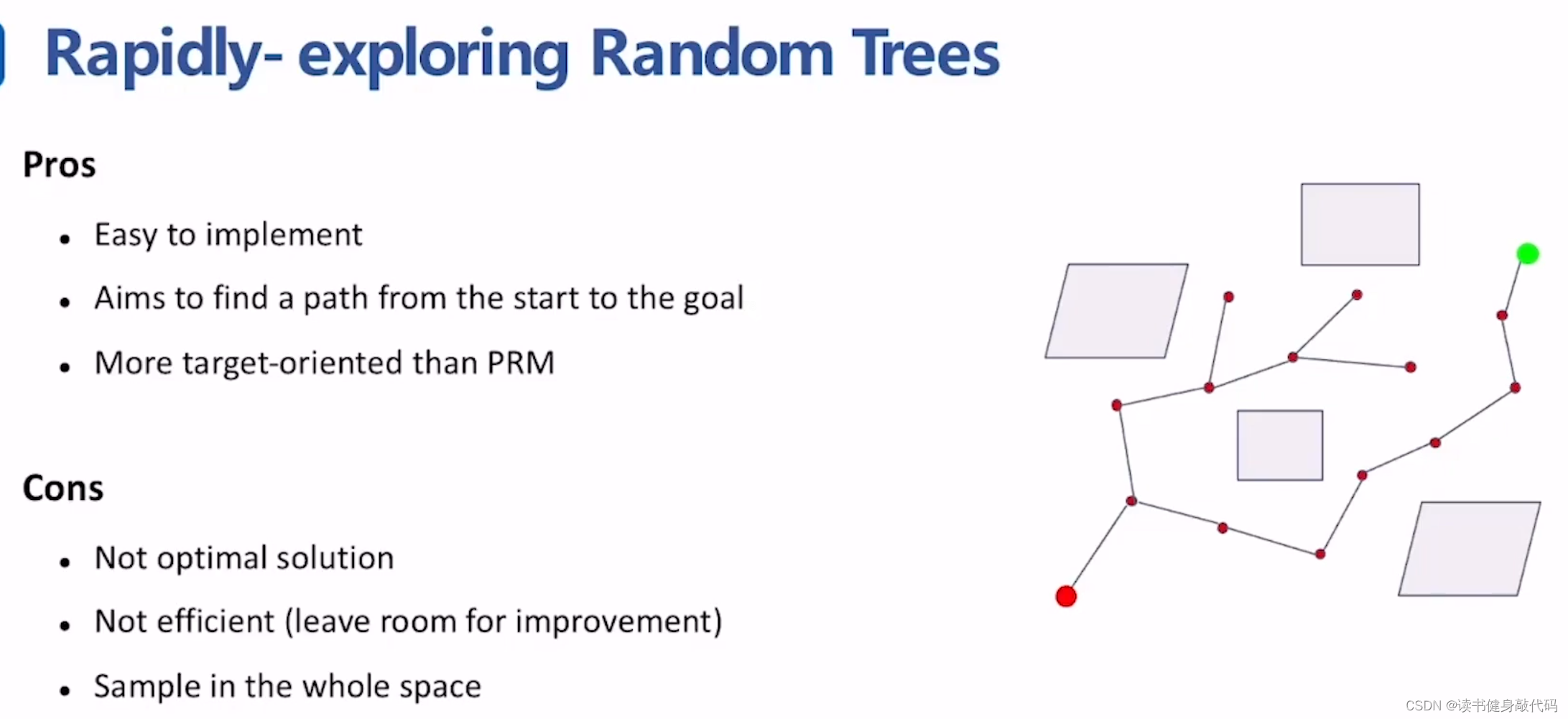
优点:简单易实现,比PRM更target-oriented,更优目的性,而不是构建全图。
缺点:是可行解,但不是最优解,不够高效(可以从sample方式,搜索算法方面改进)。
2. Optimal path planning methods
2.1 Optimal Criterion(最优性准则)
贝尔曼动态规划最优性准则的离散形式:
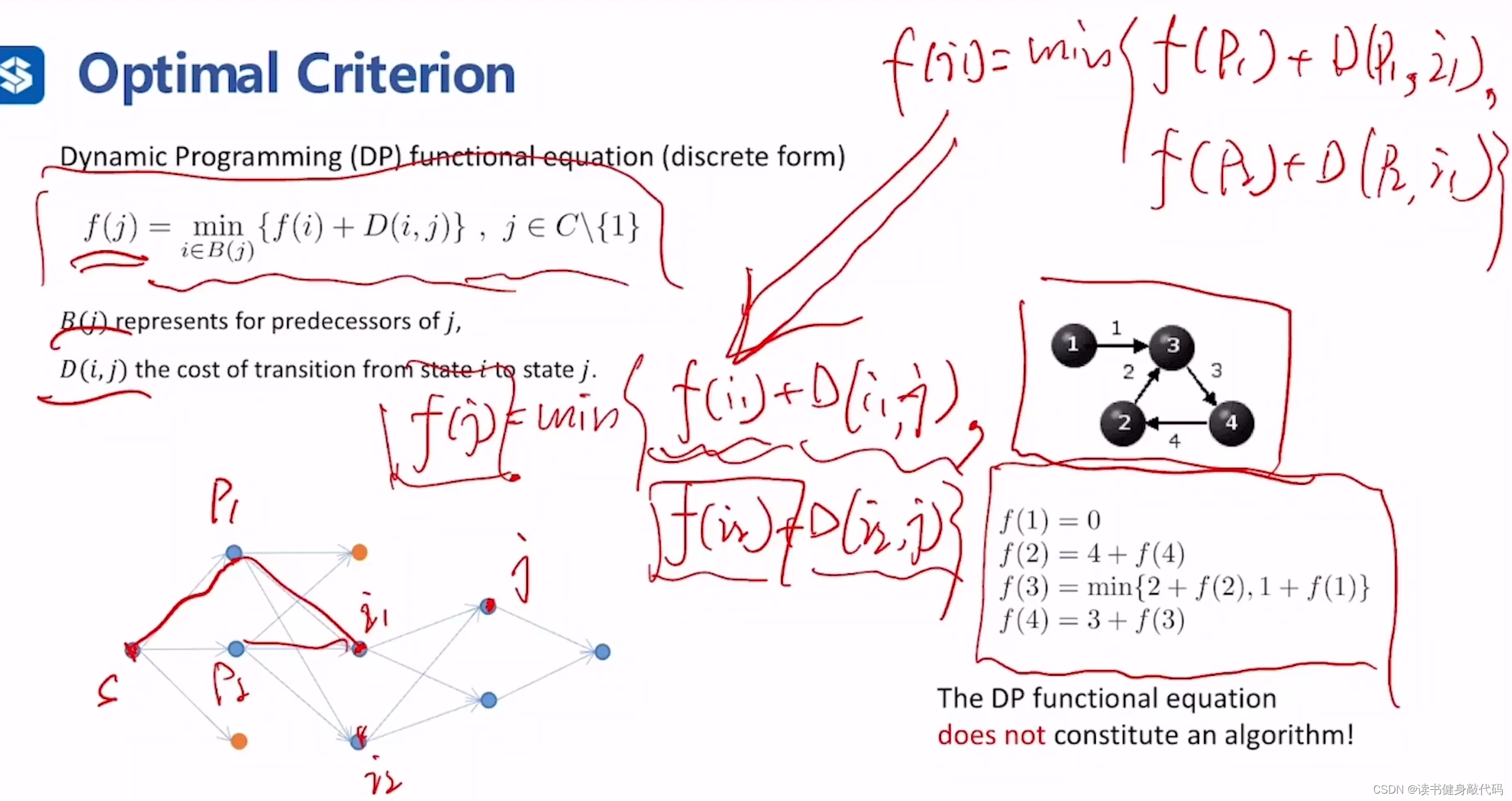
j的cost=min(j的前驱节点的cost(不止一个)+ij间的cost)
f(i)继续往前回溯,直到回溯到start节点。
以上为准则,不是算法。
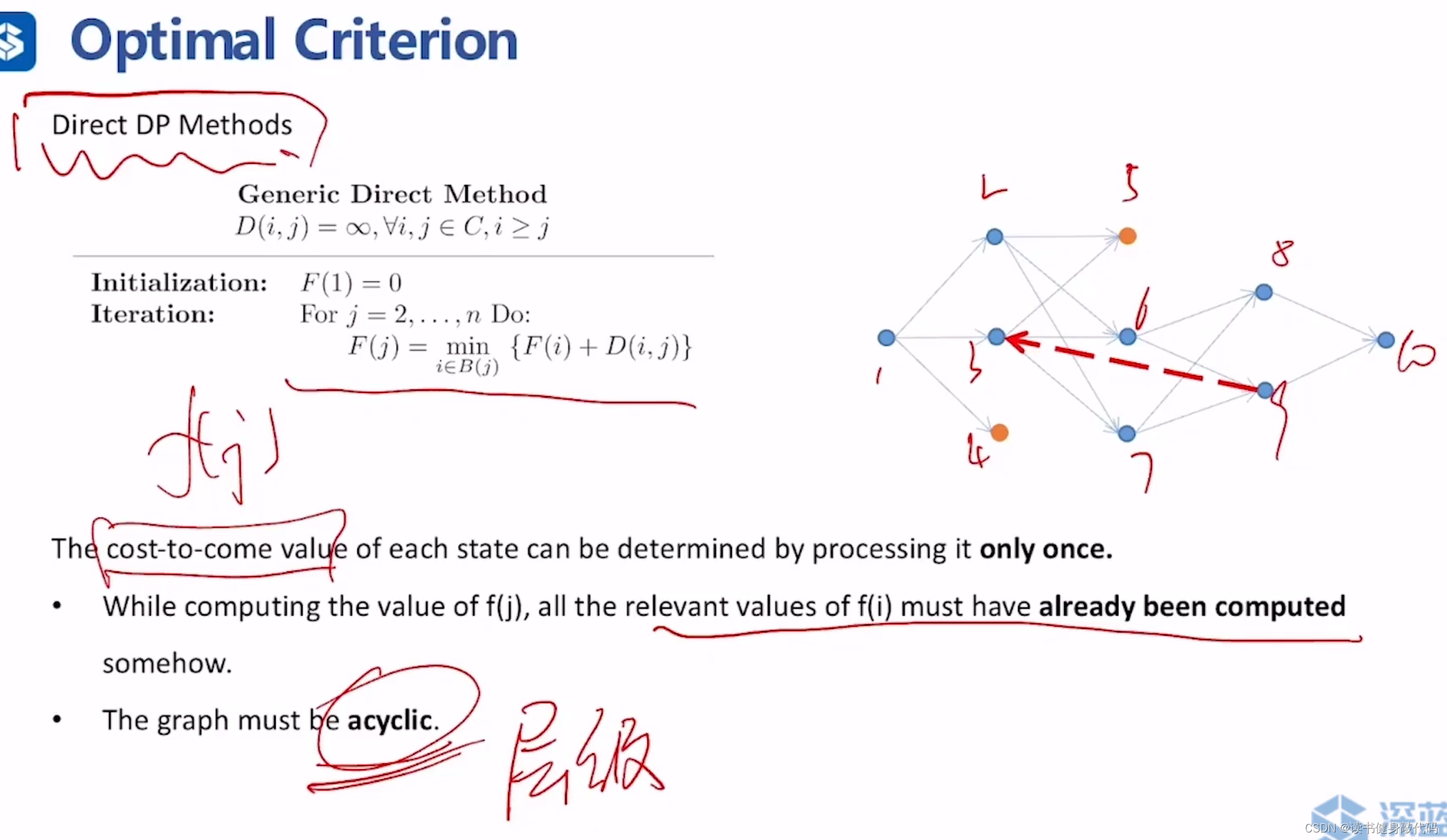
直接动态规划方法(DDP,Direct Dynamic Programming),在某些情况下假定图是无环的,但这种假设通常与问题的特定类别或应用场景相关,而不是与DDP方法本身固有相关。
DDP具体步骤
- 初始化任意两个节点的cost-to-come valu为 ∞ \infty ∞,即表示 i , j i,j i,j间不存在路径,距离保持无穷大,这两个点之间不可达。
- 使用贝尔曼动态规划最优性准则进行迭代。
其中"cost-to-come" 值(即f值)表示从起始点到达当前点所需的代价。在机器人路径规划问题中,“cost-to-come” 可能代表机器人从起点移动到当前位置所需的最小能量。通常与 “cost-to-go” 或 “cost-to-arrive” 结合使用,该值表示估计从当前状态到达目标状态的预期代价。
DDP讨论:
例如,在某些任务规划或决策问题中,要求图是无环的,是为了保证每个决策或状态转移都是向前的,即从一个状态转移到另一个状态不会回到之前的状态。这可以确保算法总是向目标状态前进,而不是在某些状态之间无限循环,这样就可以在有限的步骤内找到最优解。
在无环图(如有向无环图,简称DAG)上应用动态规划的另一个原因是,无环图有一个自然的拓扑排序。这意味着可以按照一定的线性顺序处理所有节点,使得在计算当前节点的最优值之前,所有前置节点的最优值已经被计算。这为动态规划方法提供了一个明确的结构,以便按顺序解决子问题,并最终得到全局的最优解。
在具体实践中,如果我们面对的是一个有环图,那么动态规划问题可能会变得更加复杂,因为可能存在回路,这意味着某个状态可能会重复出现,从而可能导致无限循环。在这种情况下,我们可能需要额外的策略来处理环,例如设置状态访问的限制,或者使用其他算法如贝尔曼-福特算法,它可以处理有向图中的负权重边,但同时也能检测到负权重环。
当假设图是无环(acyclic,即层级结构),每个状态(每个节点的state)仅使用一次最优准则即可算出,也即在计算新节点的cost-to-come value时,该节点的前驱节点的cost-to-come value已被算出。
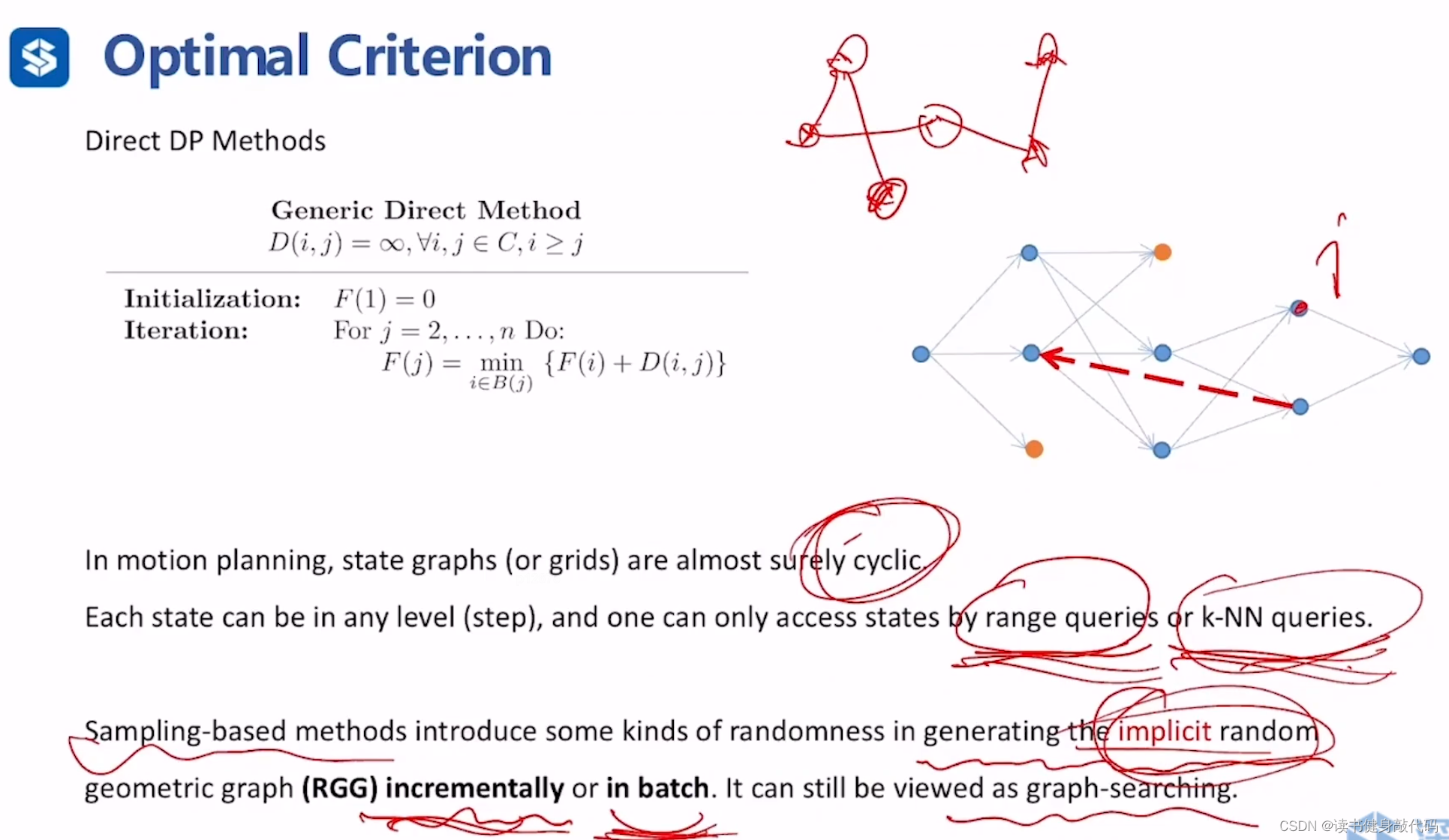
在实际的机器人运动规划中,几乎state graphs(or grids)总是存在环结构,而且我们对于state的访问也不是层级式的访问,而是range queries或k-NN(对临近节点)的访问。
sampling-based methods和graph search based methods的不同在于:前者是在生成的隐式随机几何图(RGG,implicit random geometric graph)上进行,构建图的方法存在随机性,且是增量或者批量(batch)的构建的,后者是在确定的图上进行的,图的构建通常是先全部完成。
所以本质上,sampling-based methods也可以看做图搜索方法。
(这段可以学完之后再来看看视频)
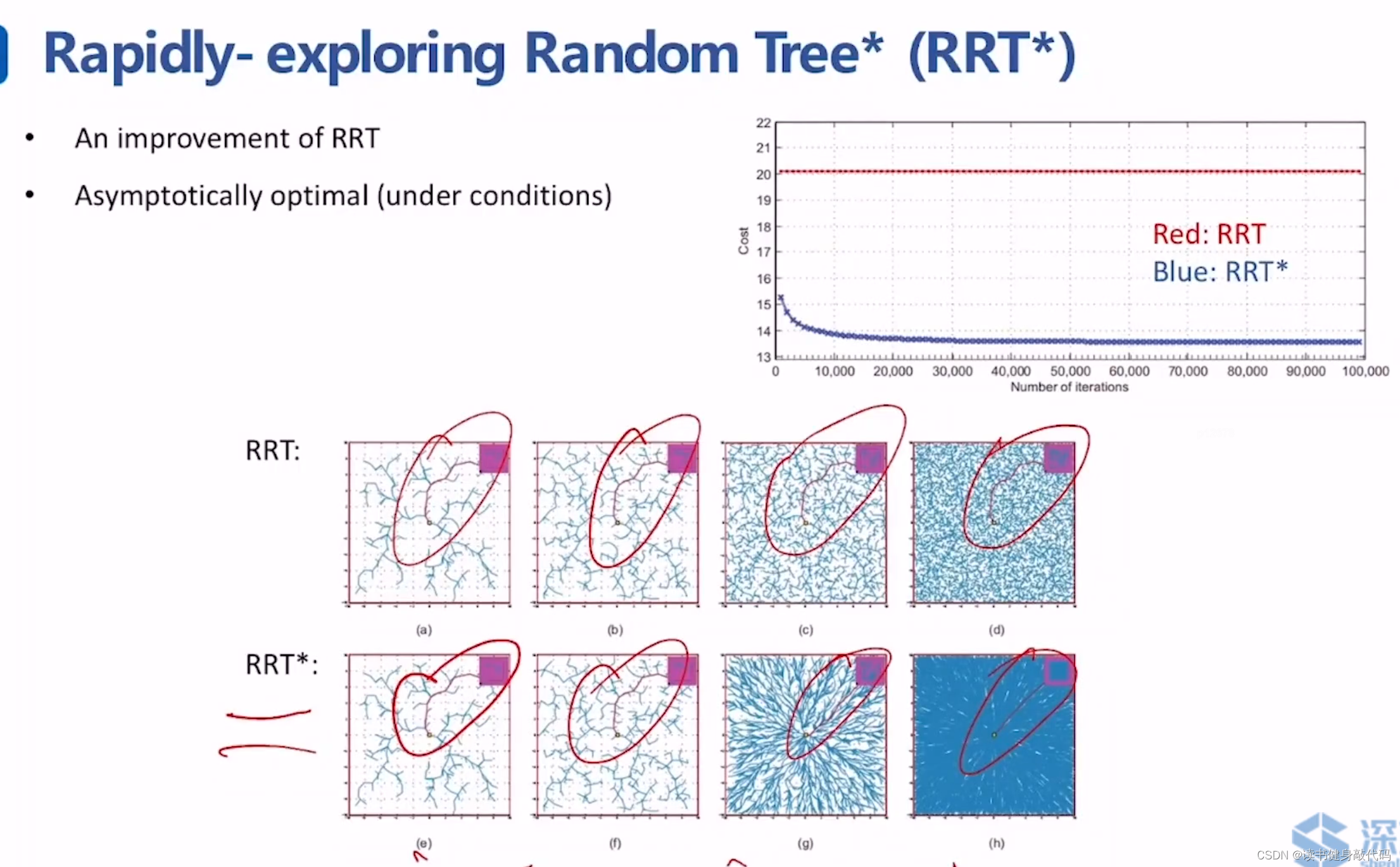
2.2 RRT*
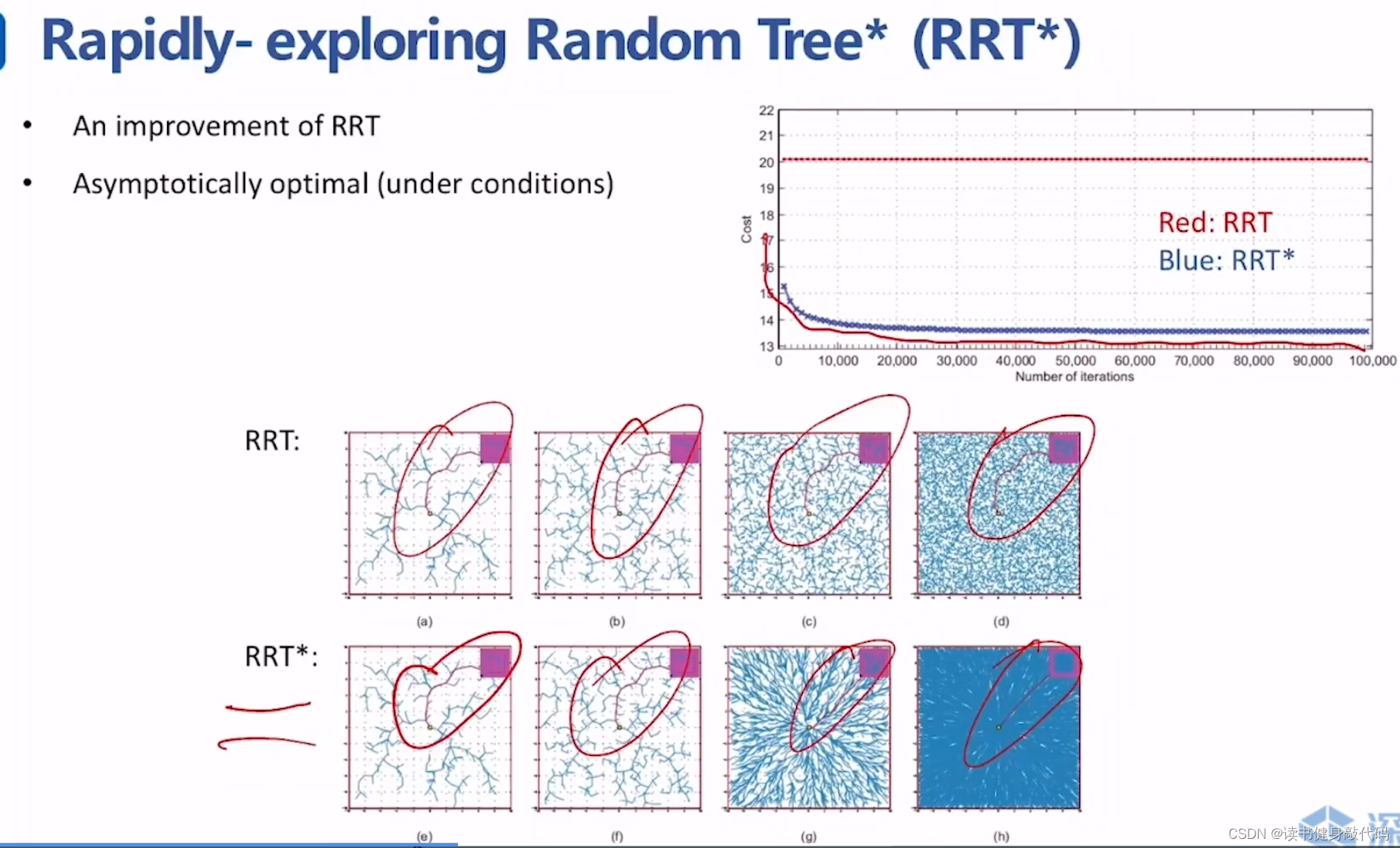
RRT*
[
1
]
^{[1]}
[1]在运行过程中的解是被不断优化的,解是渐进最优的。
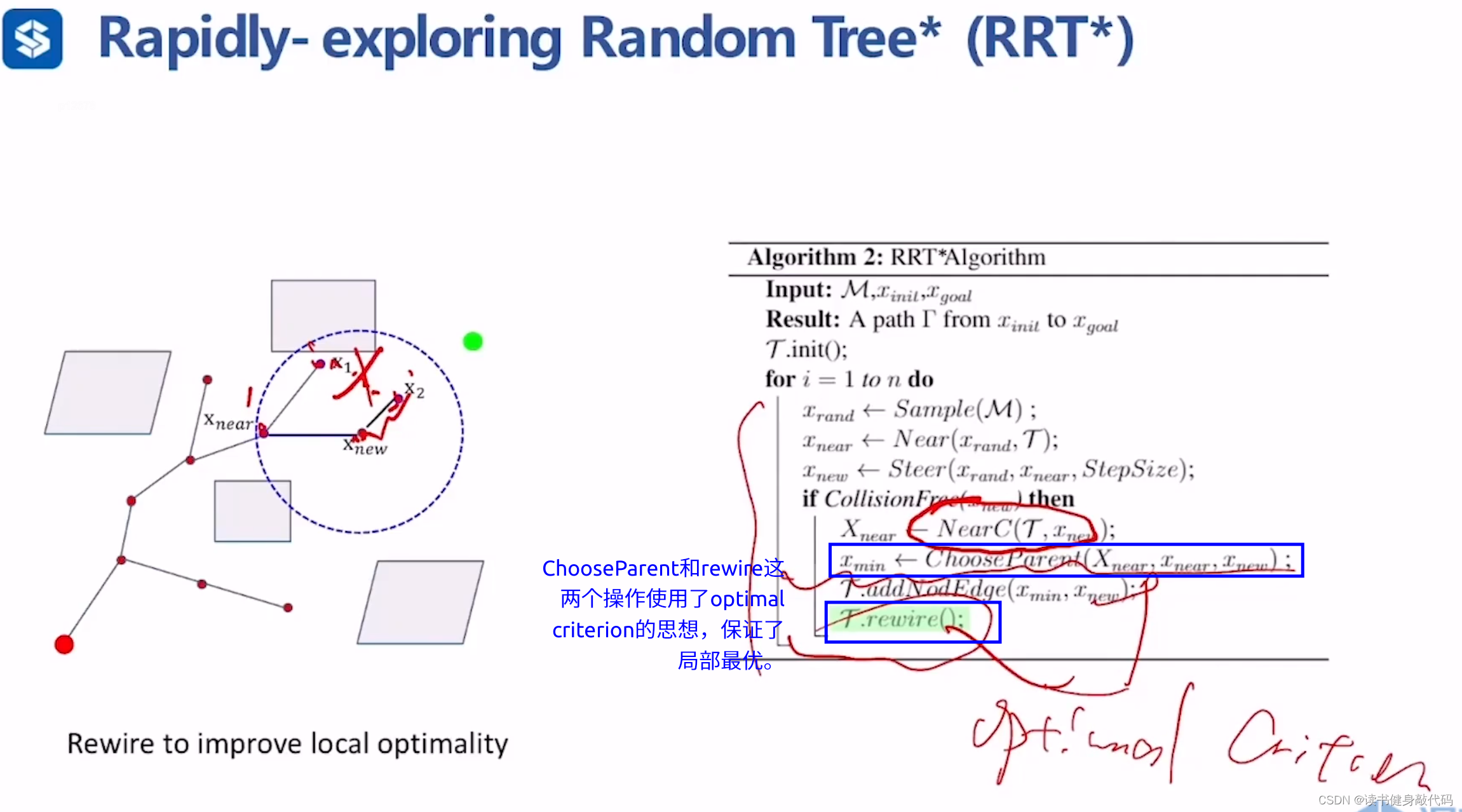
RRT*相较于RRT,使用了Optimal Criterion,体现在ChooseParent和rewire(重连)两个函数上。
RRT*流程如下:
-
上例中,起始阶段已经从 x 2 x_2 x2采样得到了 x n e w x_{new} xnew的位置,接下来要对 x n e w x_{new} xnew进行决策。
-
RRT*中sample选取 x n e w x_{new} xnew的方式与RRT相同,在获得 x n e w x_{new} xnew之后,
- RRT直接取 x n e w x_{new} xnew作为新的路径点,
- 而RRT*使用Optimal Criterion的思想进行了ChooseParent,以 x n e w x_{new} xnew为圆心、query range为半径的圆的范围内检测新路径点的candidates(即图中的 x n e a r , x 1 , x 2 x_{near},x_1,x_2 xnear,x1,x2),以各个candidates作为 x n e w x_{new} xnew的前驱节点,计算 x n e w x_{new} xnew的cost-to-come值(即f值),选取f值最小的前驱节点 x n e a r x_{near} xnear作为 x n e w x_{new} xnew的父节点,增加父节点到子节点的边 E d g e x n e a r → x n e w Edge_{x_{near}\to x_{new}} Edgexnear→xnew。
- 对 x n e w x_{new} xnew的其他parent candidates进行rewire,若从 x n e w x_{new} xnew到达该candidate时的f值更小,则增加 E d g e x n e w → x c a n d i d a t e Edge_{x_{new}\to x_{candidate}} Edgexnew→xcandidate,删除原来的 E d g e x e l s e _ n o d e → x c a n d i d a t e Edge_{x_{else\_node}\to x_{candidate}} Edgexelse_node→xcandidate(类似于Dijkstra中的更新节点cost值为更小的)。
通过ChooseParent和rewire操作,使得RRT*在不断地采样过程中不断接近最优路径。
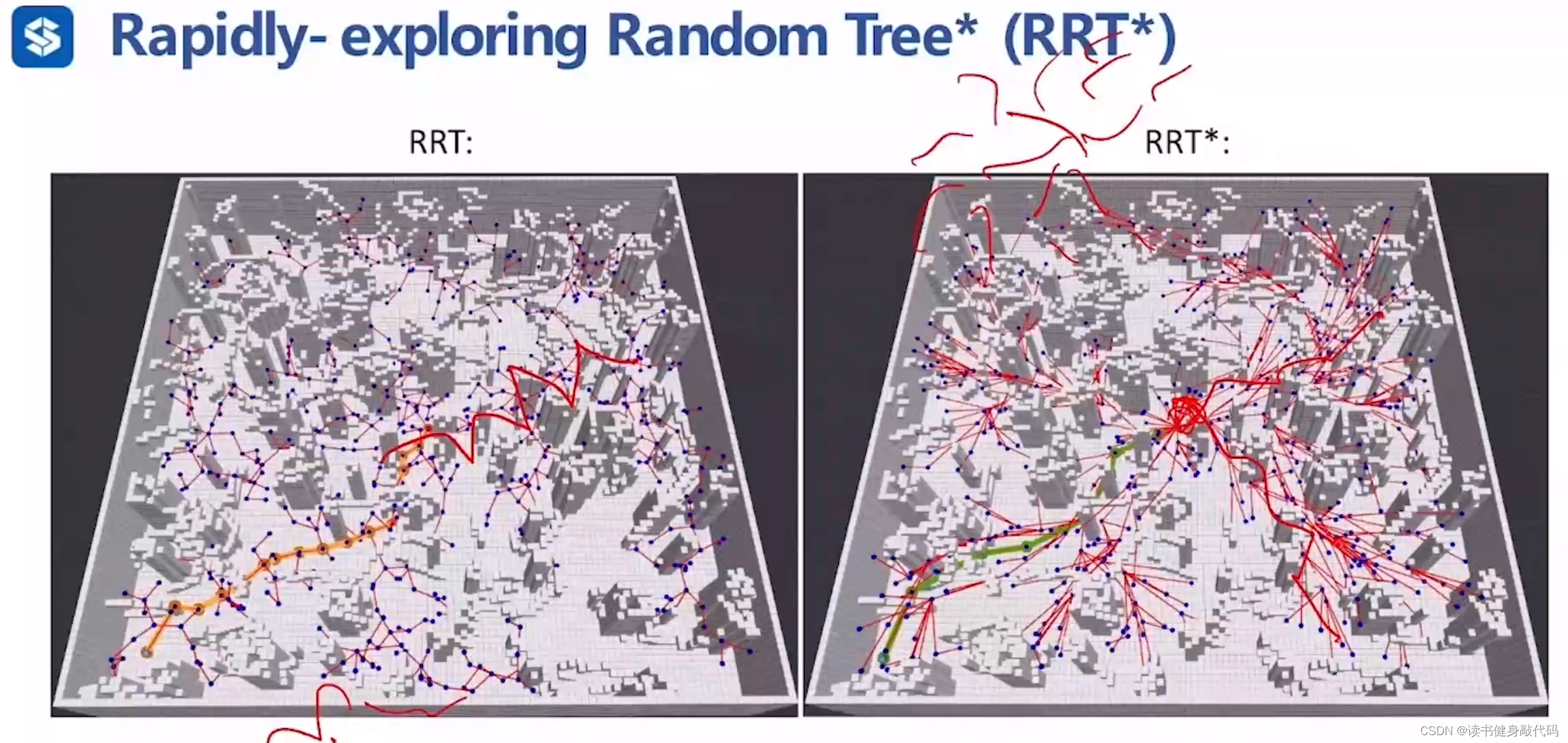
ZJU repo的对比。
(在找到一个可行解之后,在地图的各个方向上仍然需要不停地采样,就是因为在别的方向上可能存在f值更小的解。)
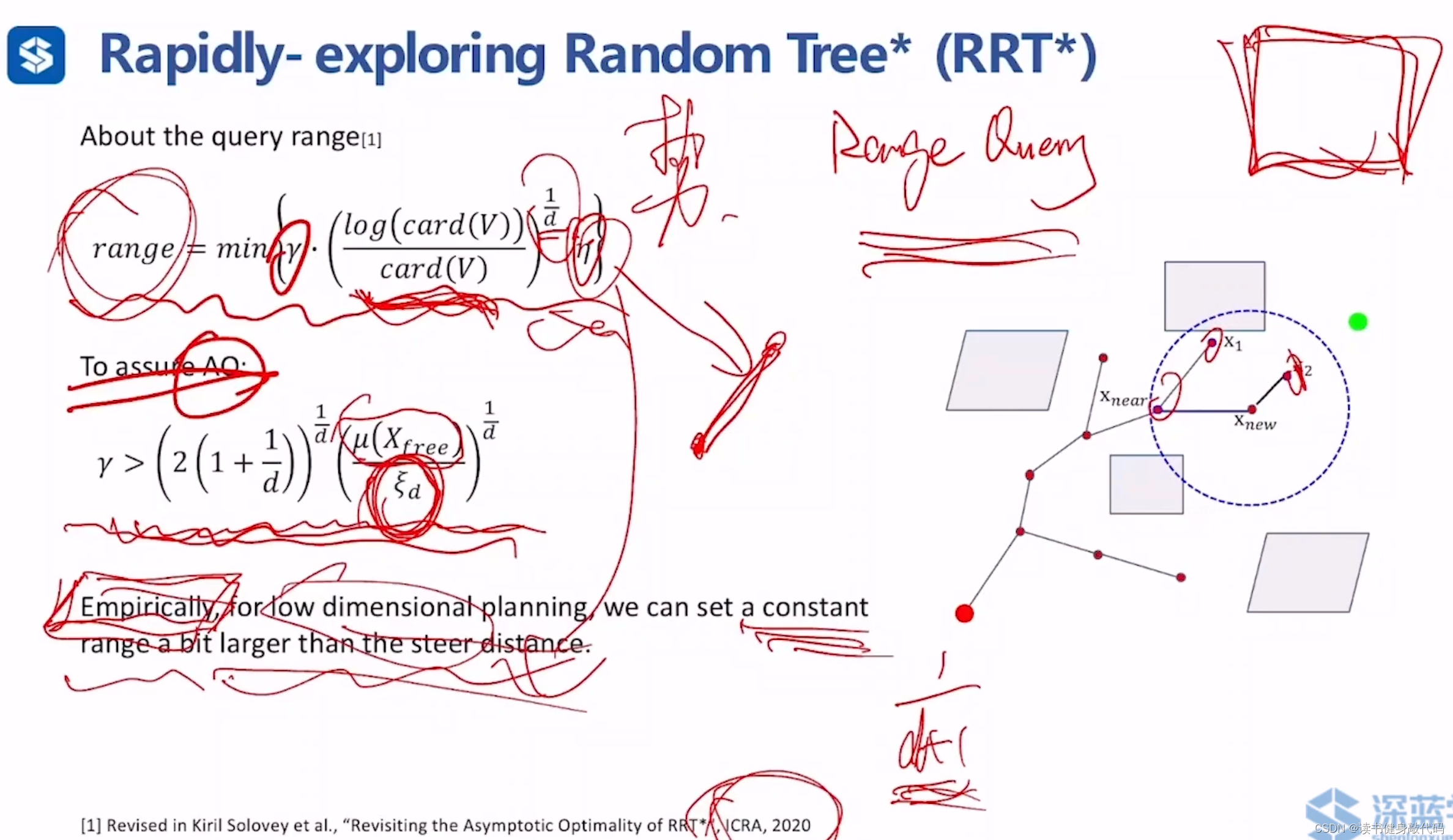
关于上述query range的取值:
r
a
n
g
e
=
m
i
n
{
γ
∗
(
l
o
g
(
c
a
r
d
(
V
)
)
c
a
r
d
(
V
)
)
1
d
,
η
}
range=min\{\gamma * (\frac{log(card(V))}{card(V)})^{\frac{1}{d}},\eta\}
range=min{γ∗(card(V)log(card(V)))d1,η}
其中
- η \eta η:在 x n e a r → x n e w x_{near}\to x_{new} xnear→xnew方向上 s t e e r ( ) steer() steer()的距离,
- c a r d ( V ) card(V) card(V):集合 V V V的势,即集合 V V V元素的个数。
- d d d:规划的维度
-
γ
\gamma
γ:为了保证渐进最优性(Asymptotic Optimality,AO),
γ
\gamma
γ必须大于某个值,即
γ > [ 2 ( 1 + 1 d ) ] 1 d ∗ [ μ ( X f r e e ) ξ d ] 1 d \gamma>[2(1+\frac{1}{d})]^{\frac{1}{d}}*[\frac{\mu(X_{free})}{\xi_d}]^{\frac{1}{d}} γ>[2(1+d1)]d1∗[ξdμ(Xfree)]d1
其中- ξ d \xi_d ξd: d d d维单位球的体积(volume)
定性分析,query range设置的越大,找到全局最优的可能性越大,然而,在工程上,通常没有时间让算法收敛到全局最优,我们可以设置一个比steer(即
η
\eta
η)大一点点的常数去跑,也能达到比较好的效果,尤其对低维的路径规划问题。
原始RRT* paper中提出了上述计算query range的公式,在2020年的这篇文章
[
2
]
^{[2]}
[2]中对query range进行了改进,将
1
d
\frac{1}{d}
d1改为
1
d
+
1
\frac{1}{d+1}
d+11
2.3 pratical implementation
介绍一些工程实现trick
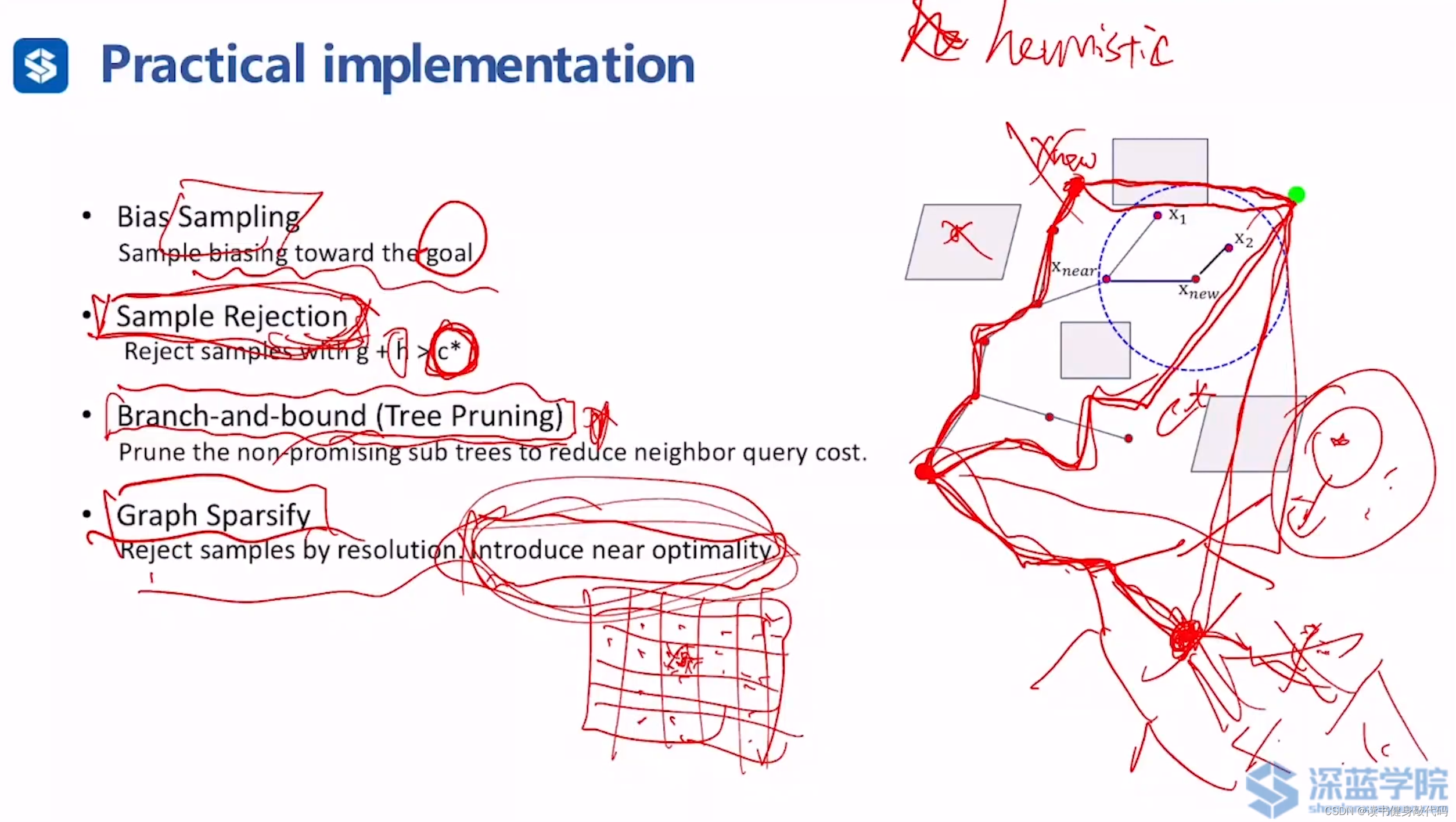
2.3.1. Bias Sampling
关于采样策略的改进,朝着目标点采样,比如设置一些阈值,当大于阈值时,直接使用goal当做 x r a n d x_{rand} xrand。类似的采样策略有很多,后面再细讲。
2.3.2. Sampling rejection
在某些情况下拒绝某些采样,比如有了一个feasiable的解,其cost-to-come valu= c ∗ c^{*} c∗,设计一个admissiable heursitic,用于计算到goal的cost的估计,即h,这个estimation由于是admissiable的,所以会比真实的cost-to-come value小。
对于一个新采样点i,可得g,可以计算 h i → g o a l h_{i\to goal} hi→goal,当 f = g + h > c ∗ f=g+h>c^{*} f=g+h>c∗时,我们就reject这次采样。
2.3.3. Branch-and-Bound(Tree pruning树剪枝)
跟DT的剪枝有些相似,思想和Sampling rejection相似,别的 f = g + h f=g+h f=g+h的值很大的子树(non-promising的树)可以选择减掉,后面不再搜索,降低后续query的复杂度。但由于只是local的认为子树是non-promissing的,并不是global的,即可能在该子树后面存在到goal更小的cost的节点存在,所以这种trick也是精度和效率的一个trade-off。
2.3.4. Graph Sparsify
将搜索空间分成很多格子,在每个格子内只留一个采样点,在离散空间(在某个resolution下)是最优,但在连续空间引入了次优性。
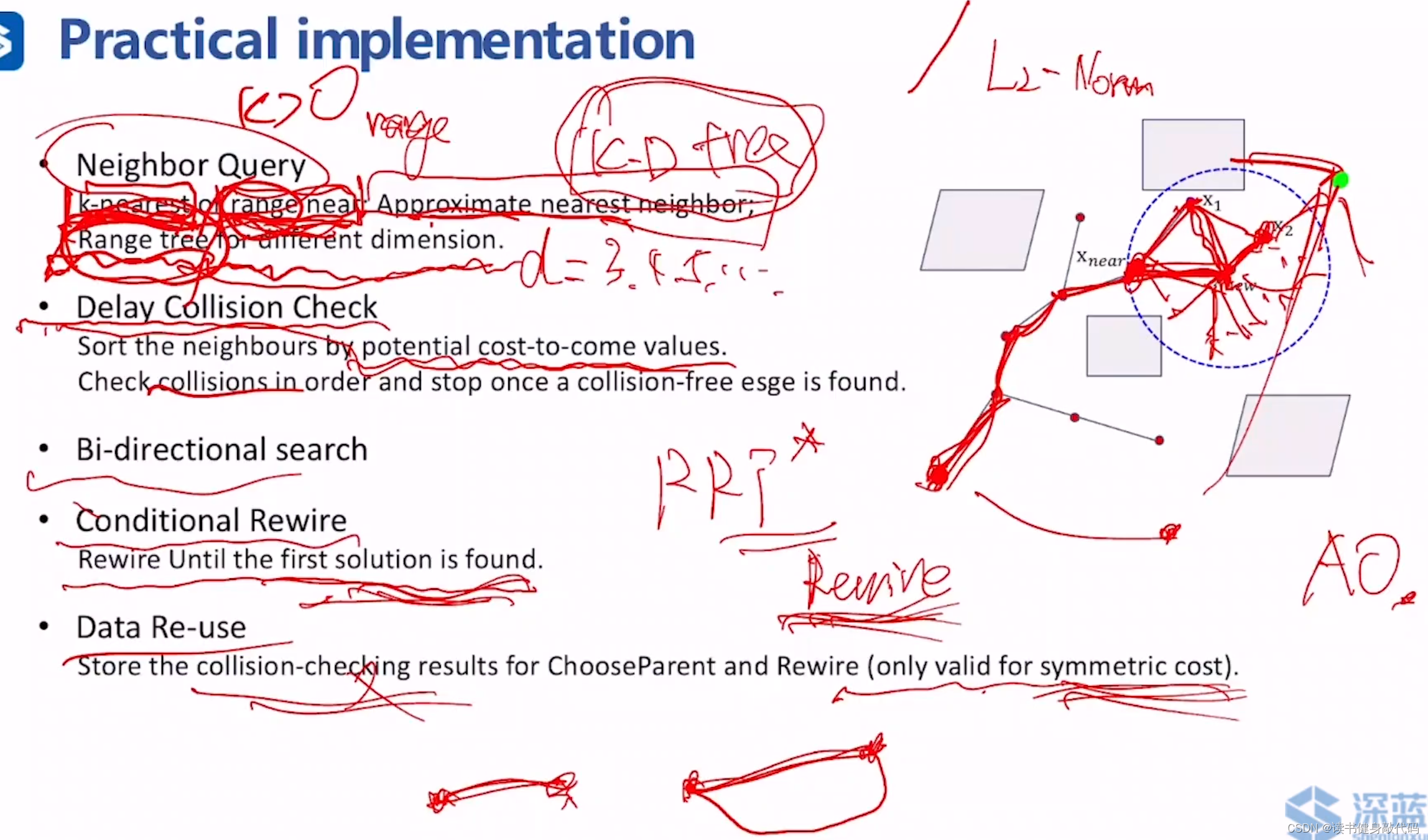
2.3.5. Neighbor Query
在 x n e w x_{new} xnew的query range内搜索,或者是找最近的n个点(kNN),数据结构使用K-D tree或者Range tree(针对高维情况,每一维的range计算方法不同的情况)
2.3.6. Delay Collision Check
lazy-collision-check的一种方法,在loop遍历所有parent candidates前,可以先对各个potential cost-to-come value f=g+h值进行升序排序,先从f值低的开始check,找到第一条collision-free的path的parent candidate之后,后面的就可以不再遍历了。当节点较多时提升较大。
2.3.7 Bi-directional search
从start和goal各长一棵树,在中间汇合,若要保证AO(渐进最优性),则需要设计树的连接方式。
2.3.8 Conditional Rewire
由于rewire需要消耗计算资源,在找到第一条feasiable solution之前,仅使用RRT,不使用rewire,找到之后再开始rewire。
2.3.9 Data Re-use
保存collision-checking results for ChooseParent and Rewire,仅适用于对称的cost。
3. Accelerate Convergence
前面讲了找feasiable path和找渐进最优的path,我们希望算法收敛的速度越快越好,所以有对于加速收敛方面的研究。
3.1 RRT#(exploitation角度)
RRT#从两个方面对RRT*进行了改进:Over-exploitation,Under-Exploitation
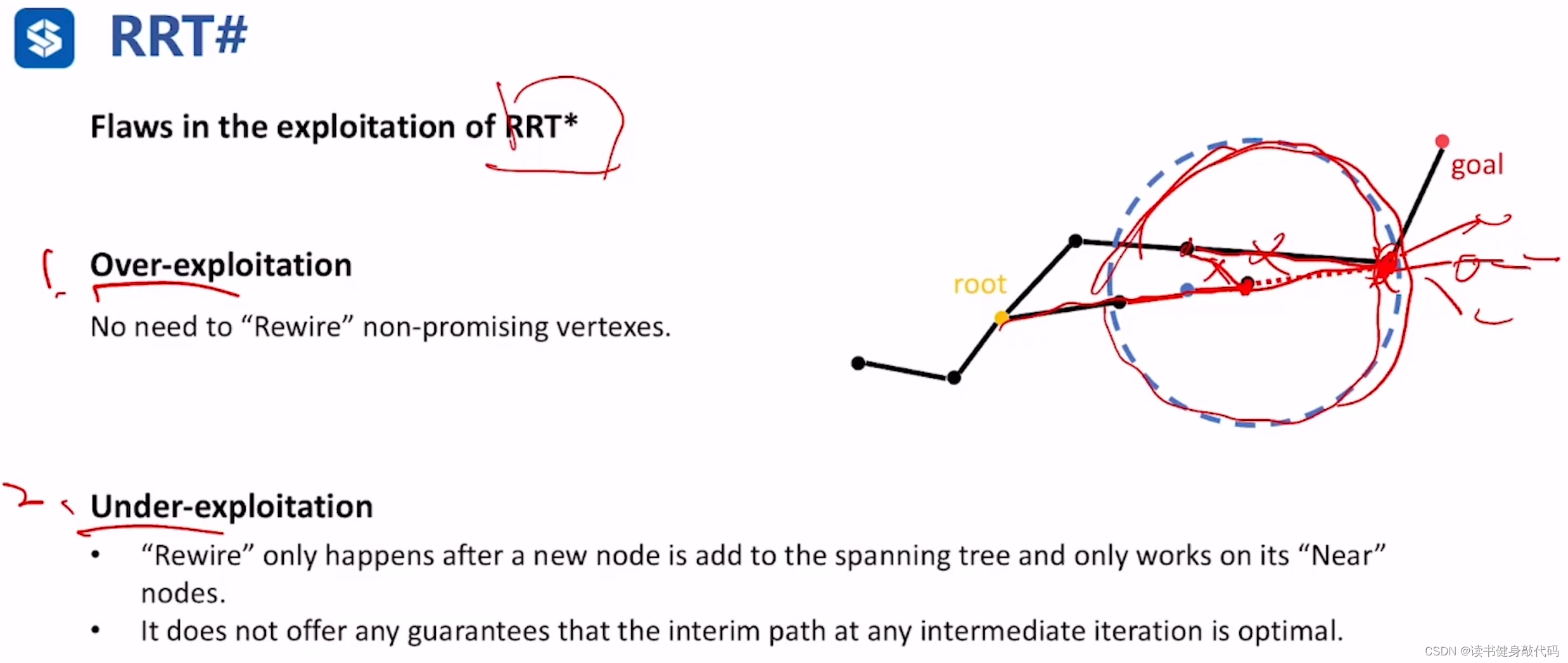
-
Over-exploitation(过度利用,属于规划问题的exploitation phase,对已有树的优化)
和Sampling rejection有些类似,Sampling rejection是在sampling阶段选择采样点,通过计算potential sampling point的heuristic,进而得出 f = g + h f=g+h f=g+h与已有的 c ∗ c^{*} c∗进行比较,而Over-exploitation是在找到了parent之后,再rewire阶段再次使用heuristic(当然这两个heuristic可能不一样),如果 f = g + h > c ∗ f=g+h>c^{*} f=g+h>c∗,则无需对该candidate进行rewire操作。 -
Under-Exploitation(欠利用,同属exploitation phase)
这个不太理解,感觉没讲清楚。PPT上说的是Rewire仅在新节点被加到spanning tree中之后才进行,且只对其Near节点进行(我觉得不加到tree中也没必要rewire啊?在query range中肯定只对Near进行啊?这个需要看paper才能深入理解。)
RRT#的工程实现代码可能比较复杂。
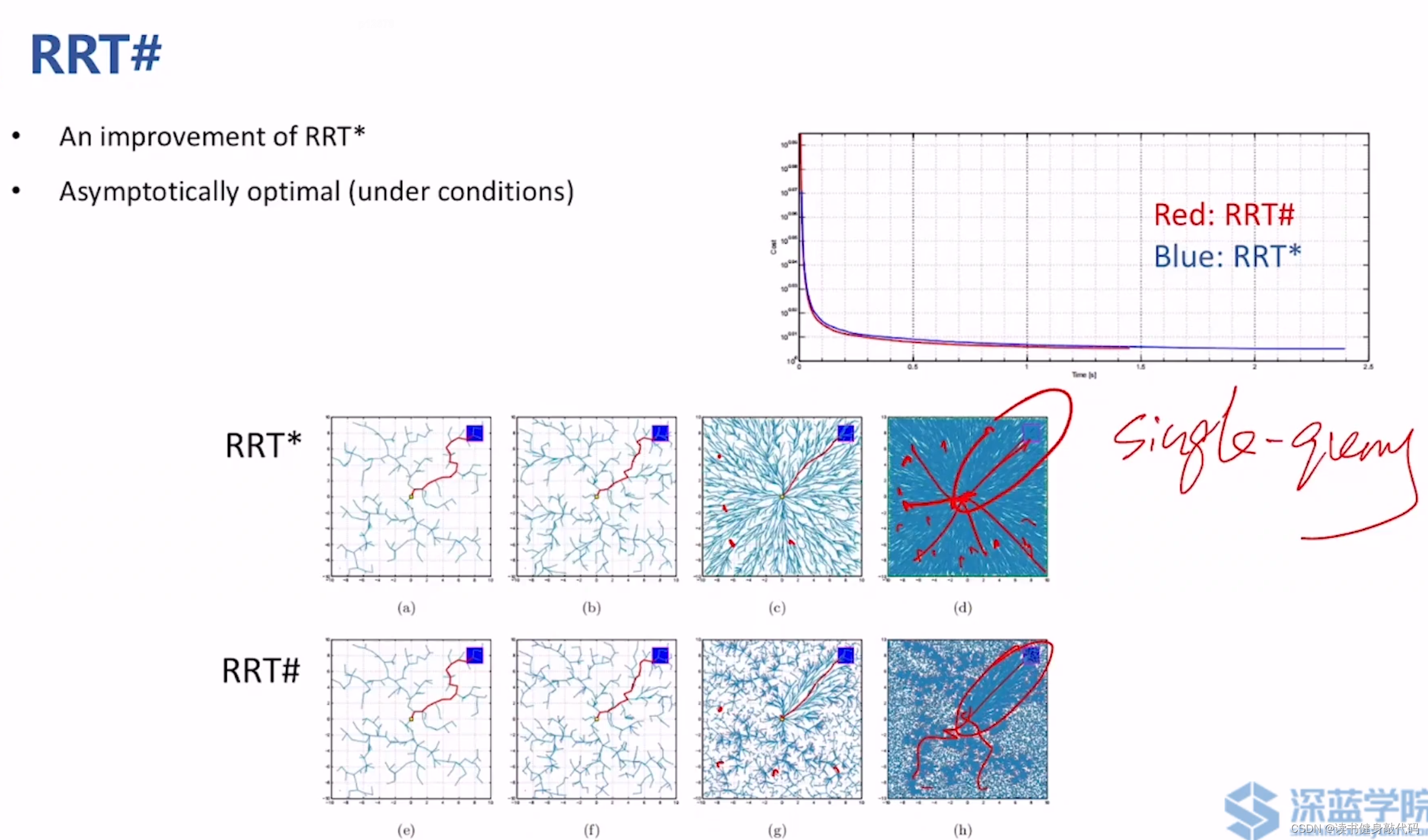
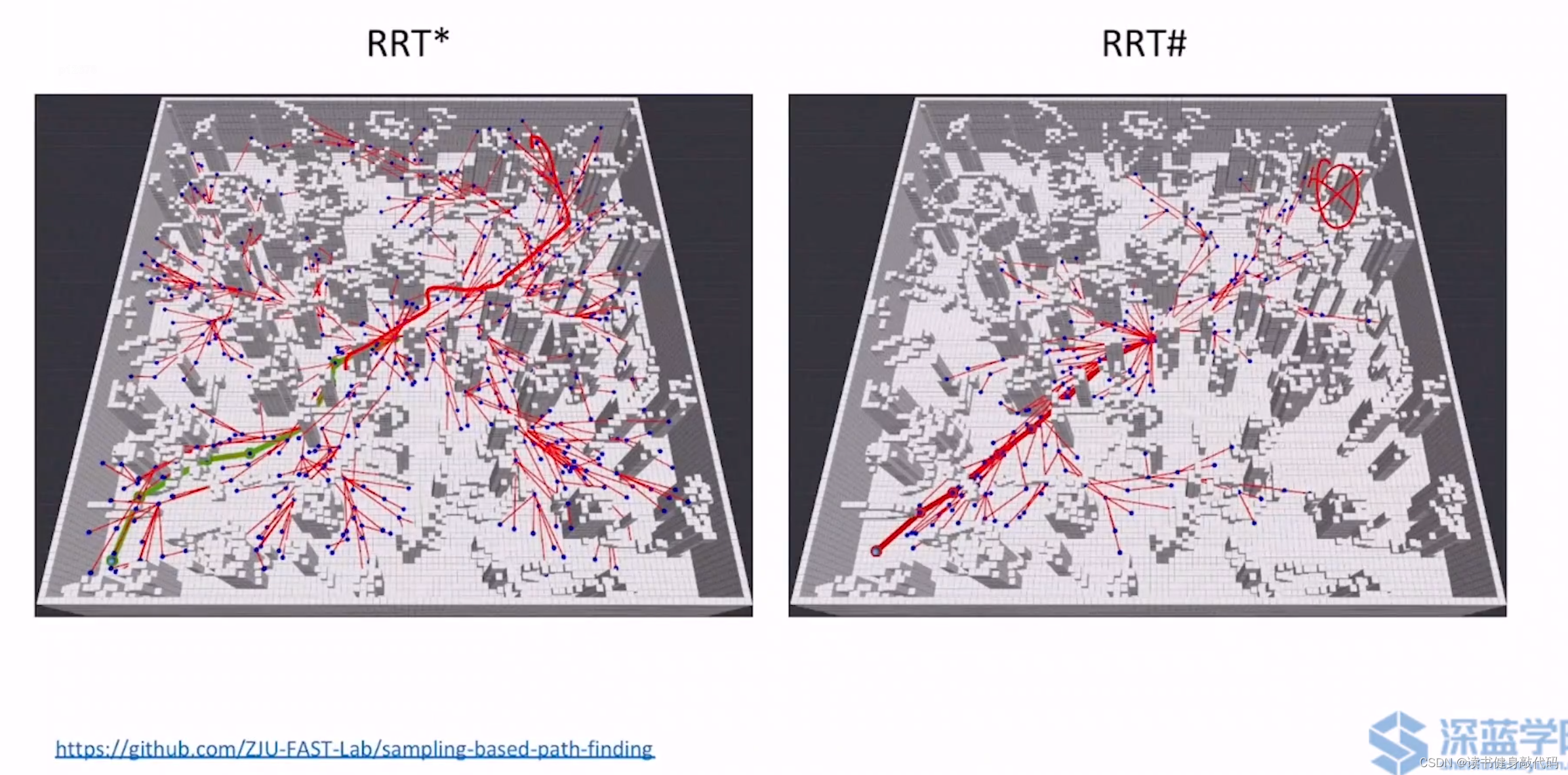
上面两图可以直观地看出,RRT#是更优目标性,找到 c ∗ c^{*} c∗之后,其他方向的扩展就很少了,基本不操作,而RRT*仍然是继续扩展,保证了多个方向的较优的solutions。RRT#更适用于single query。
3.2 Informed sampling(exploration角度,smapling strategy)
informed sampling信息采样,通常指一种采样策略,它利用已有的问题解决方案信息来引导采样过程,以提高搜索效率和寻找更优解的概率。
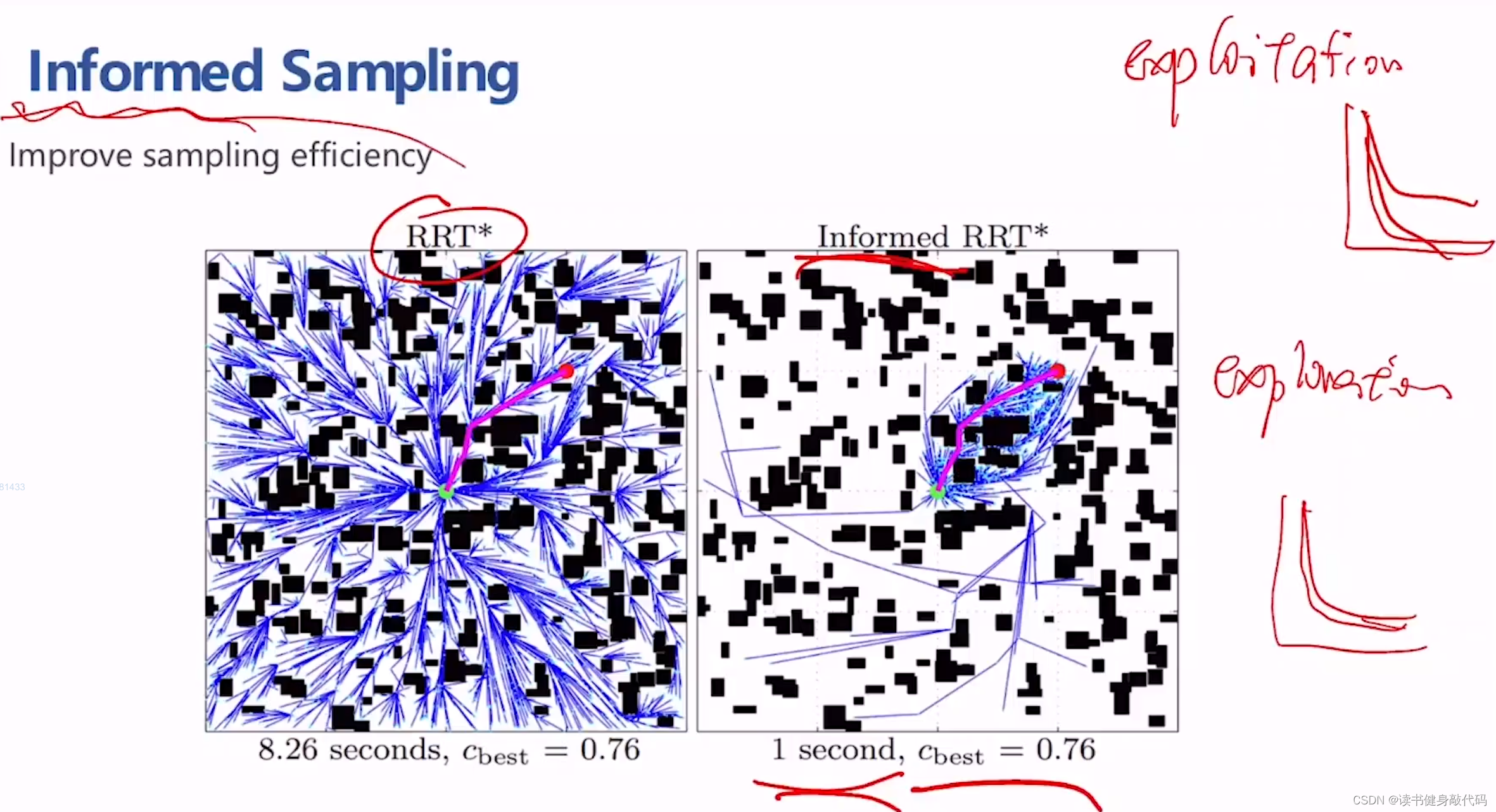
直观理解,比RRT*更快地找到AO解。
简单理解即缩小采样的范围,且缩小后的范围要合理。
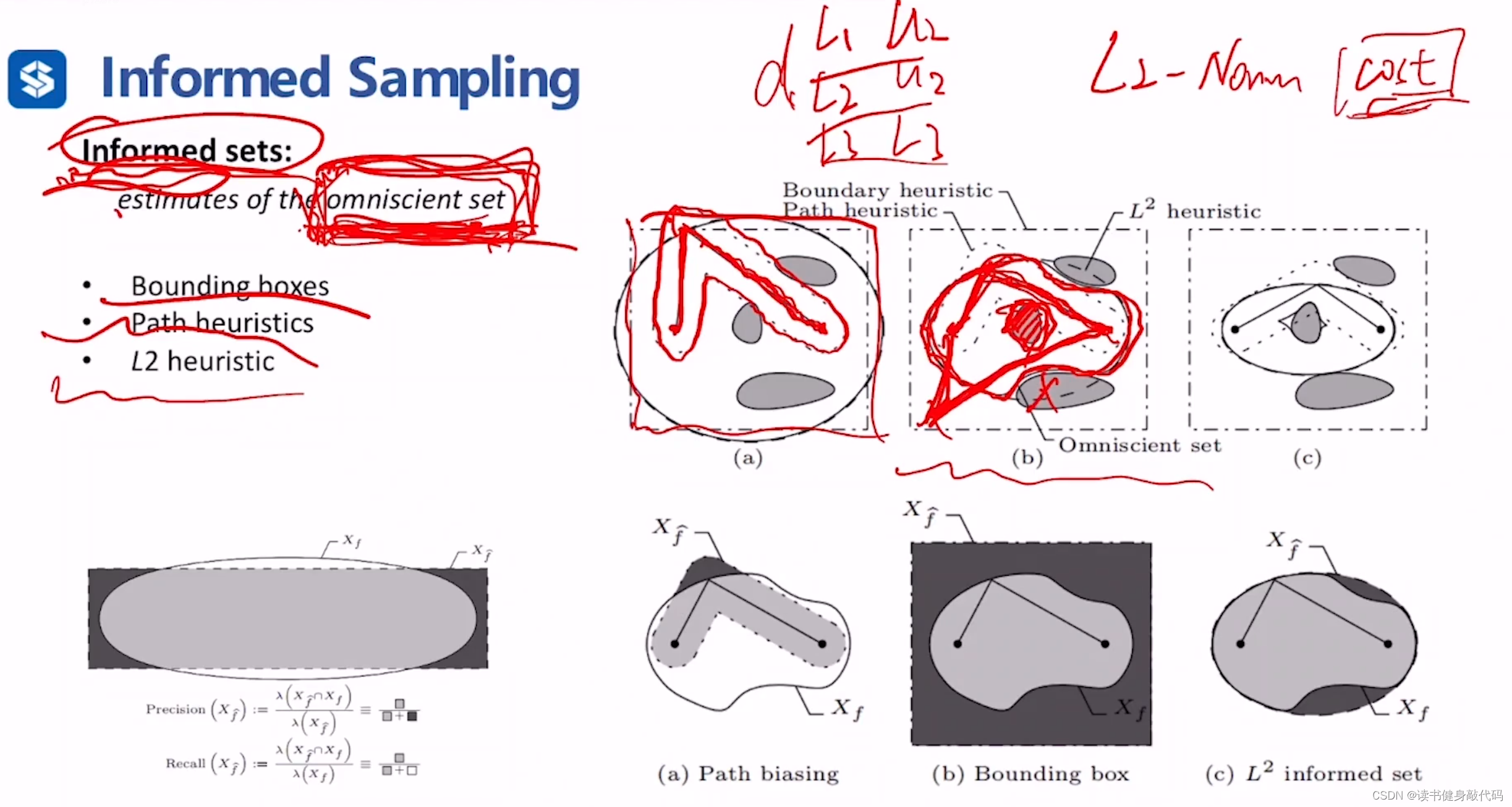
omniscient set(全知集)是对求解有提升的采样范围,我们需要设计一个sets,作为omniscient sets的estimation,称作informed sets(信息集)
缩小后的范围为,有三种缩小方式:
- Bounding box:在每一个维度上找到一组(lower bound, upper bound)用于缩小sampling范围
- Path heuristics:只在已有的feasiable path附近搜索
- L2 heuristic:以start和goal为椭圆两焦点,以当前已有的最优解为长轴之长(椭圆是平面上到两个相异固定点的距离之和为常数的点之轨迹) 绘制椭圆,以此椭圆为informed sets。
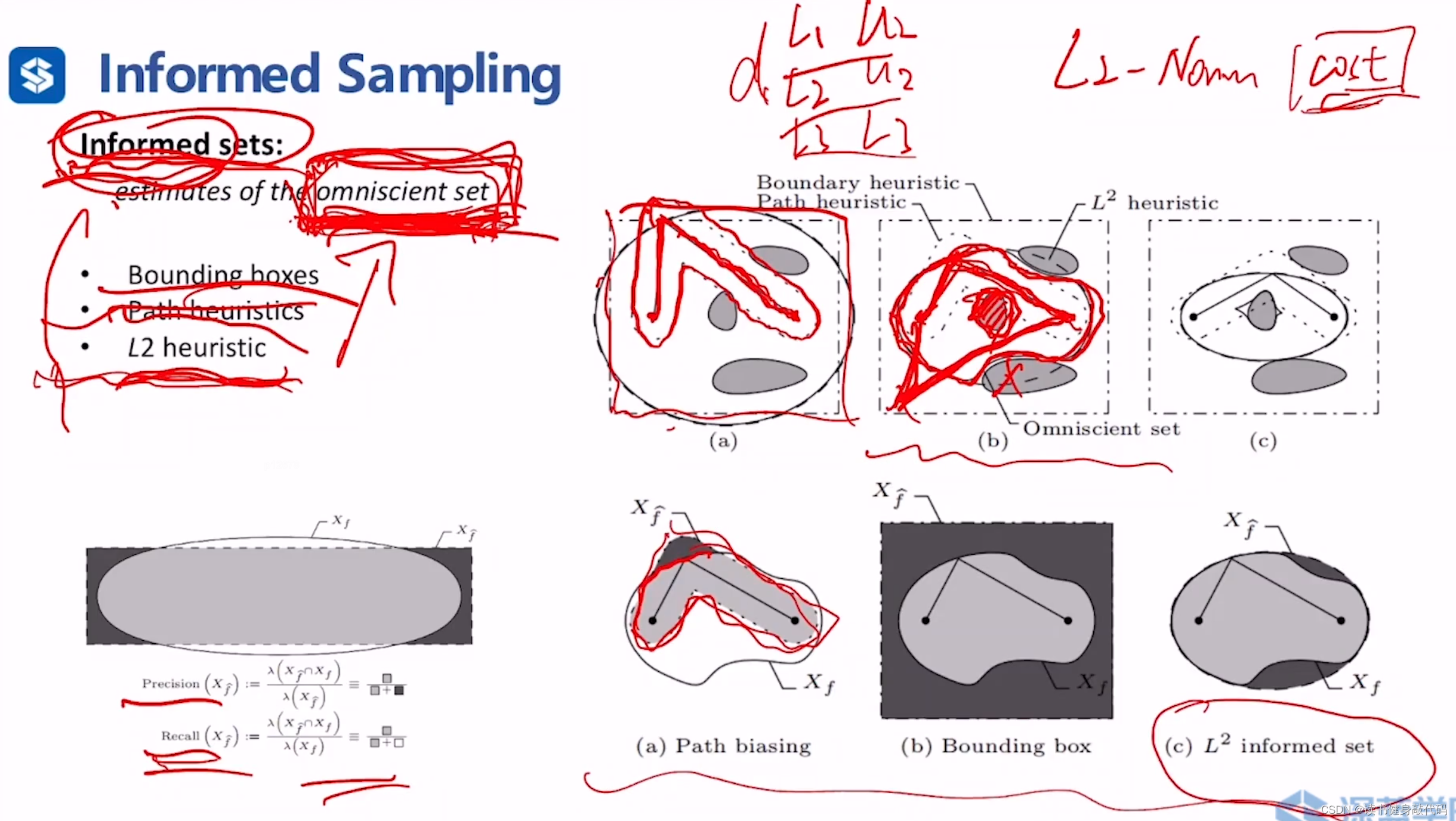
两个metrics:
- precision:准确率,informed sets中属于omniscient set点在informed sets中的比例。
- recall:召回率,informed sets中属于omniscient set点在omniscient set中的比例。
以上三种informed sets,L2 heuristic的precision和recall均为最高。
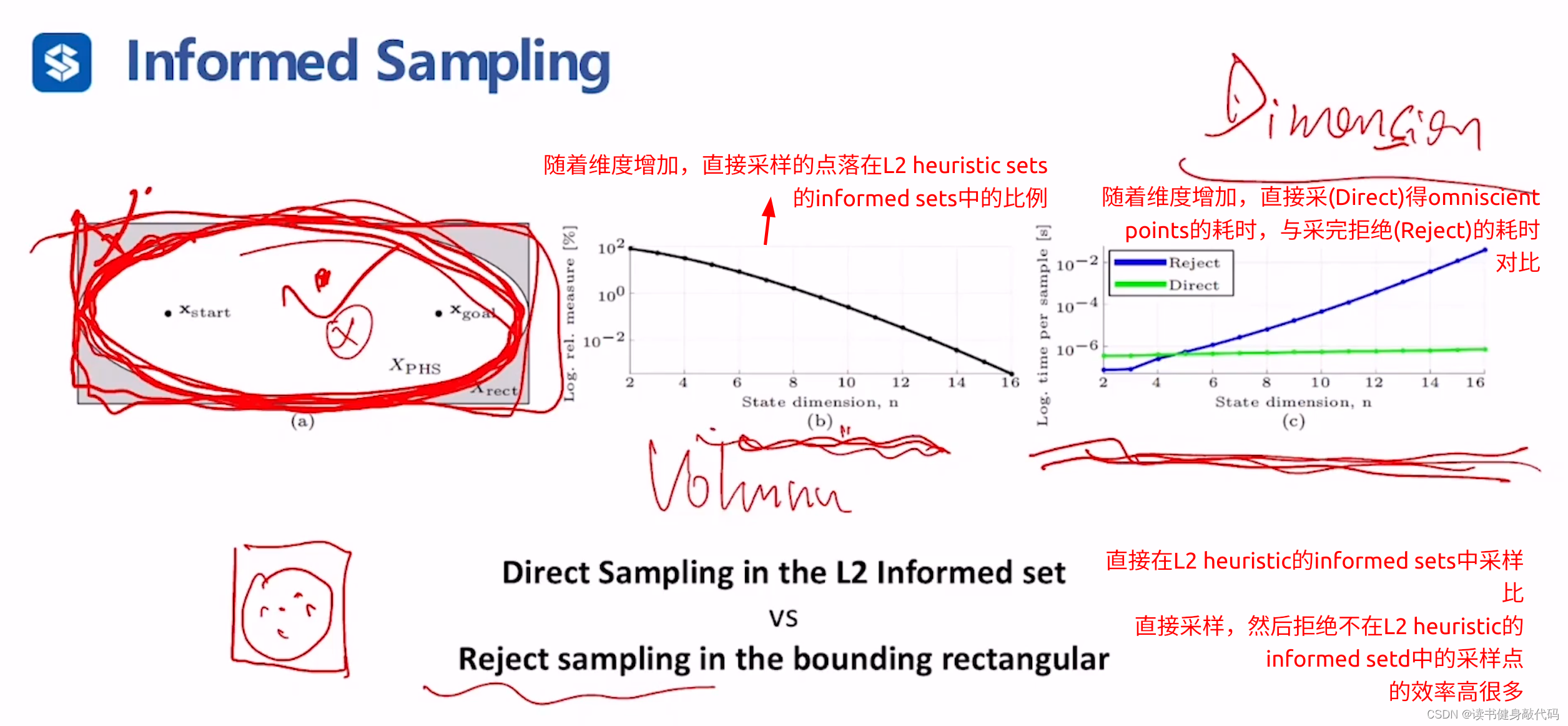
针对L2 heuristic informed sets有两种策略:
- 直接在informed sets内采(Direct);
- 直接全部采,然后拒绝不在informed sets中的(Reject)。
Direct策略更优,随着维度增加,Reject采到omniscient sets中的点比例下降,且耗时增加。
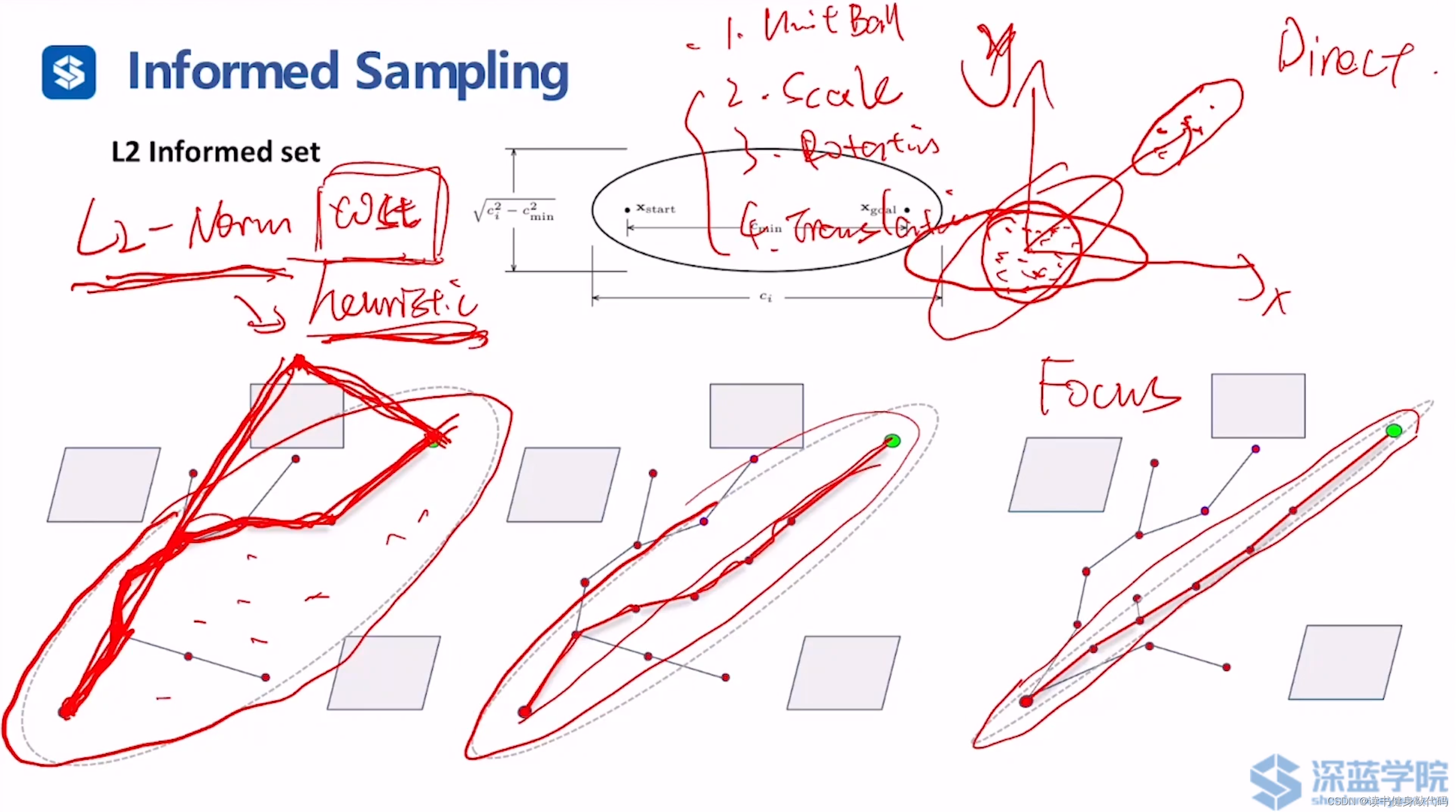
探究为什么L2 heuristic informed set有效:
对于使用L2 heuristic informed sets,需要使用L2 norm作为cost的计算方法。
admissiable heuristic ≤ \leq ≤最优解,是对最优解的下界的估计,如果 c ∗ ≤ c^{*} \leq c∗≤采样点的admissiable heuristic,则必有: c ∗ ≤ c^{*} \leq c∗≤采样点的admissiable heuristic ≤ \leq ≤经过此采样点的最优cost
实际实现方法:
- unit ball:在单位圆(或者高维的单位球)内进行采样;
- scale:将圆进行放缩为椭圆;
- Rotation:将椭圆进行旋转;
- Translation:将椭圆进行平移。
L2 informed set的局限性:只能用于cost function为L2 norm时,如果不是,则无法显式设计出informed set。
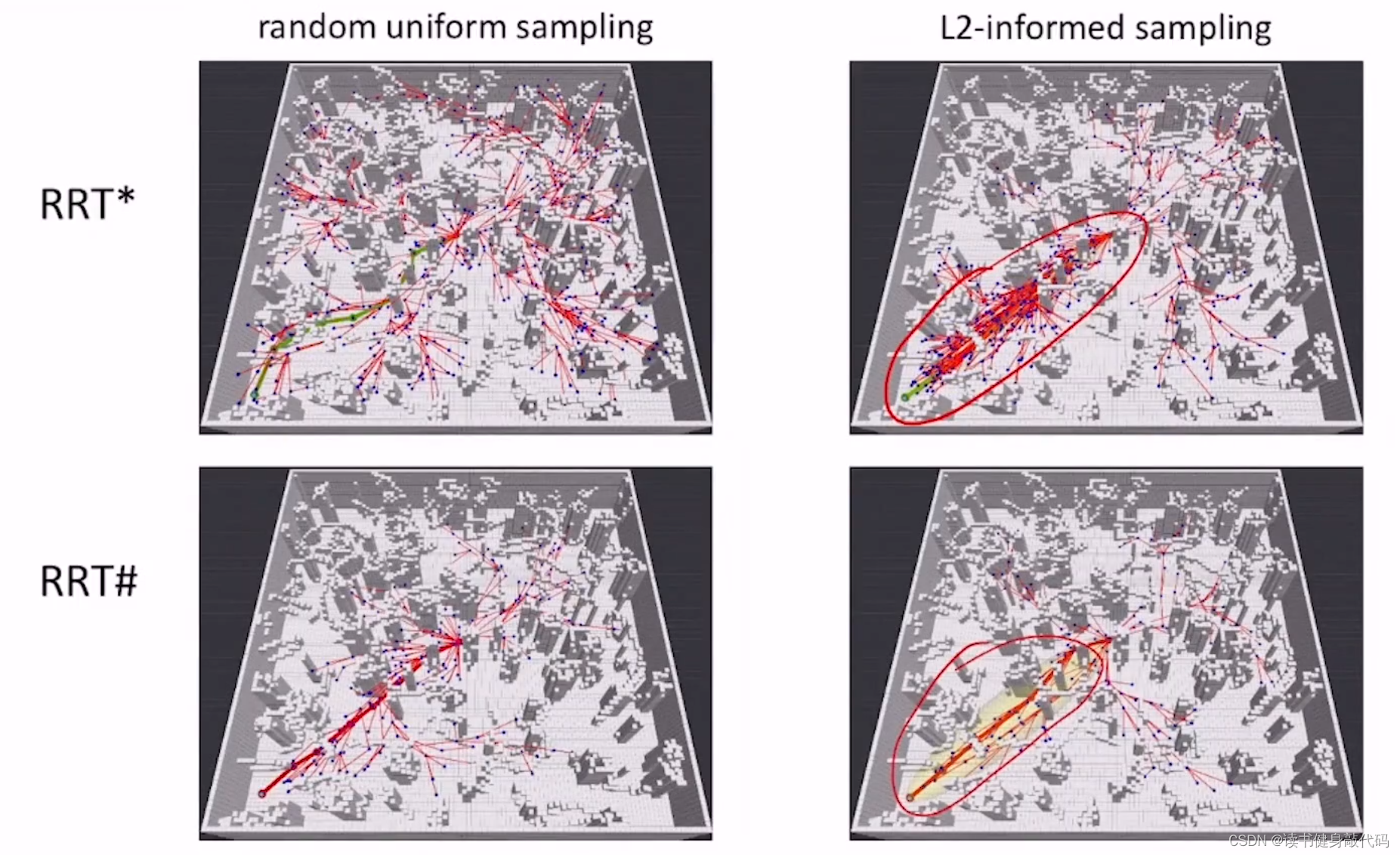
L2-informed set在RRT*和RRT#上的使用。
3.3 GuILD(exploration角度,smapling strategy)
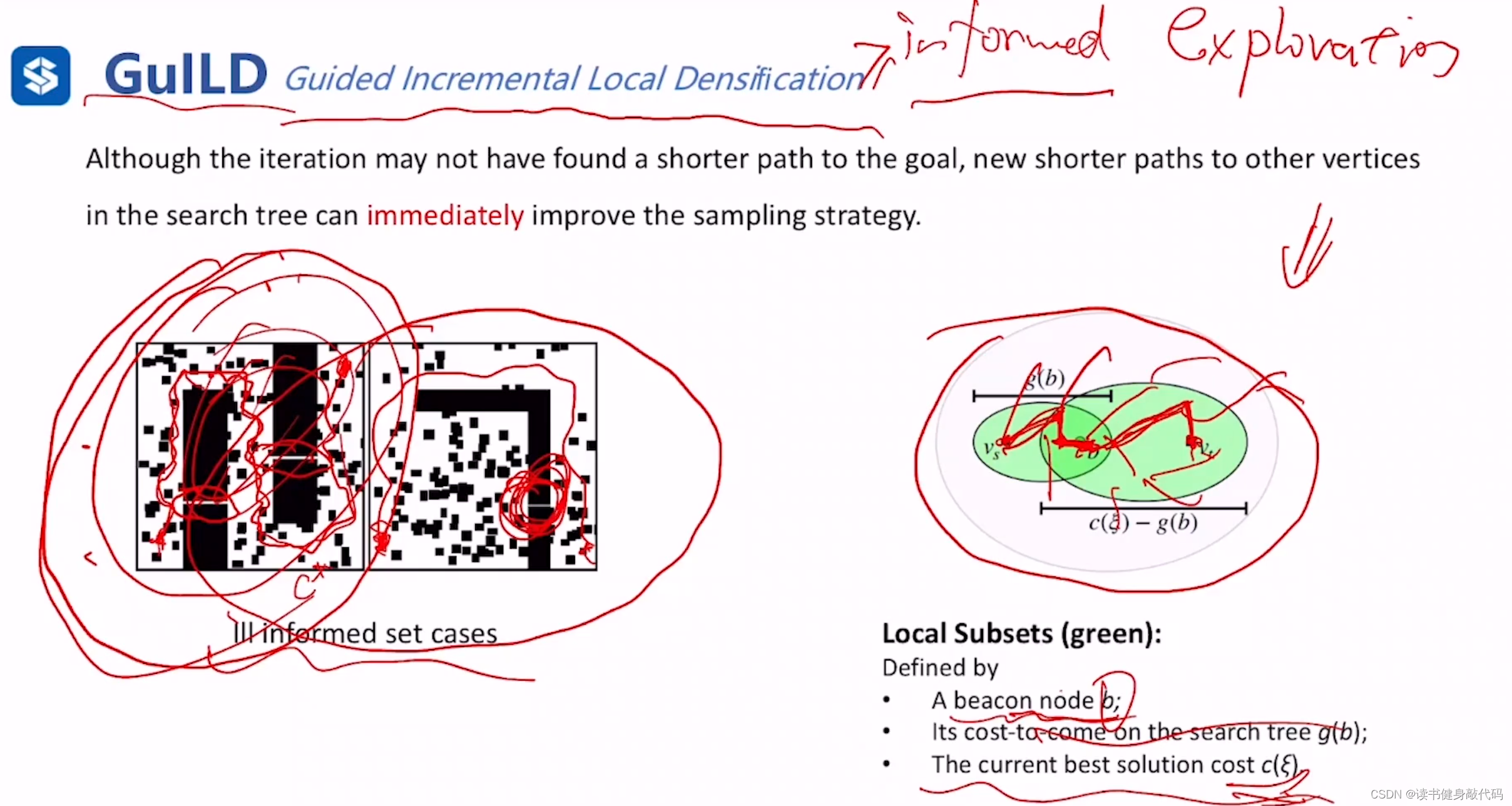
informed set缩小的条件是当前最优cost变小,此方法对于窄缝中的点很难采样到,如果最优路径需要经过这些窄缝中的点,那么informed set很可能很难缩小搜索范围。
GuILD提出了将informed set分为两部分:
- 在当前的树中找一个beacon node(信标点)b,
- 计算出g(b),以start和b作为焦点,g(b)作为长轴之长绘制椭圆 t 1 t_1 t1
- 当前最优解的cost为 c ( ξ ) c(\xi) c(ξ),以b和goal为焦点,以 c ( ξ ) − g ( b ) c(\xi)-g(b) c(ξ)−g(b)为长轴之长绘制椭圆 t 2 t_2 t2
则之前单独的informed set(IS)被分解为 t 1 , t 2 t_1,t_2 t1,t2两个local subsets(LSs),总体cost仍然为 c ( ξ ) c(\xi) c(ξ),已经证明:LSs的估计是IS的upper bound(上界)
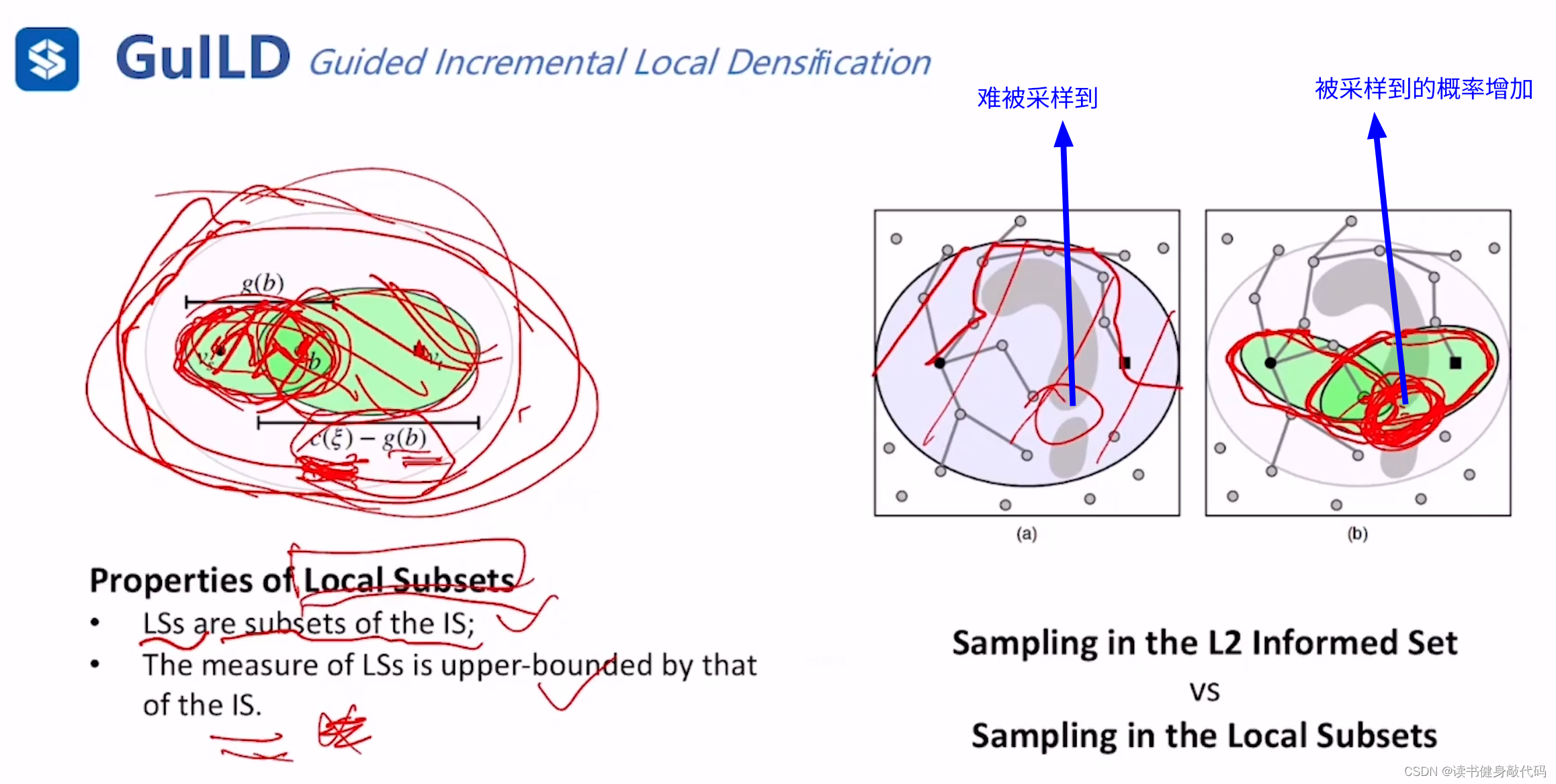
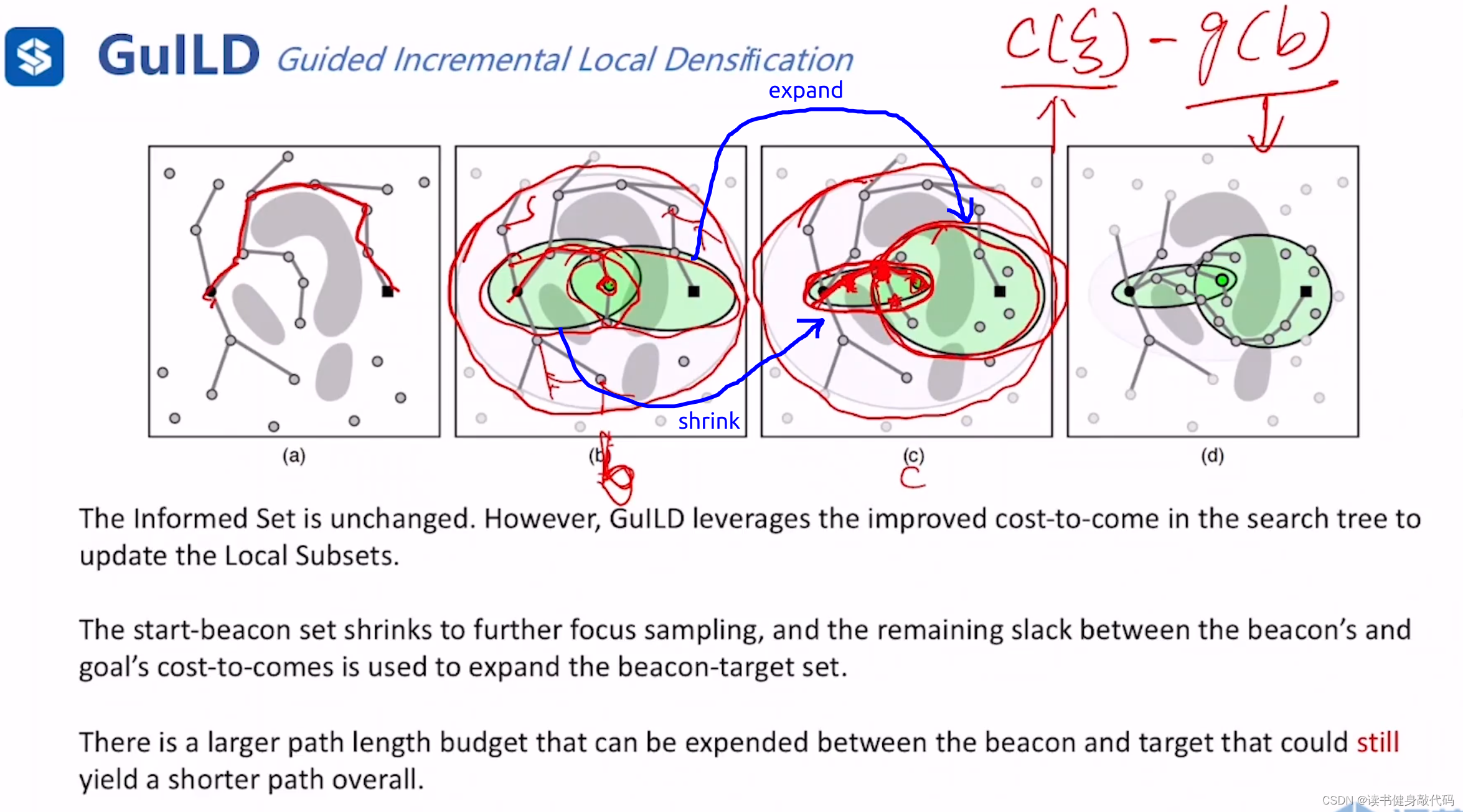
一个关键的变化是在整体 c ( ξ ) c(\xi) c(ξ)没有变化时,start-beacon set会由于搜索过程中找到了更小的cost的path而被shrink,所以beacon-goal set会被expand,增大了找到窄缝中点的概率。
4. Development trend
本章从三个方面简单讲述了sampling-based path methods以及一项最近的研究:
- Feasiable(PRM,RRT);
- Optimal(RRT*,implenmentation trick);
- Convergence(RRT#,Informed RRT*,GuILD(2022))
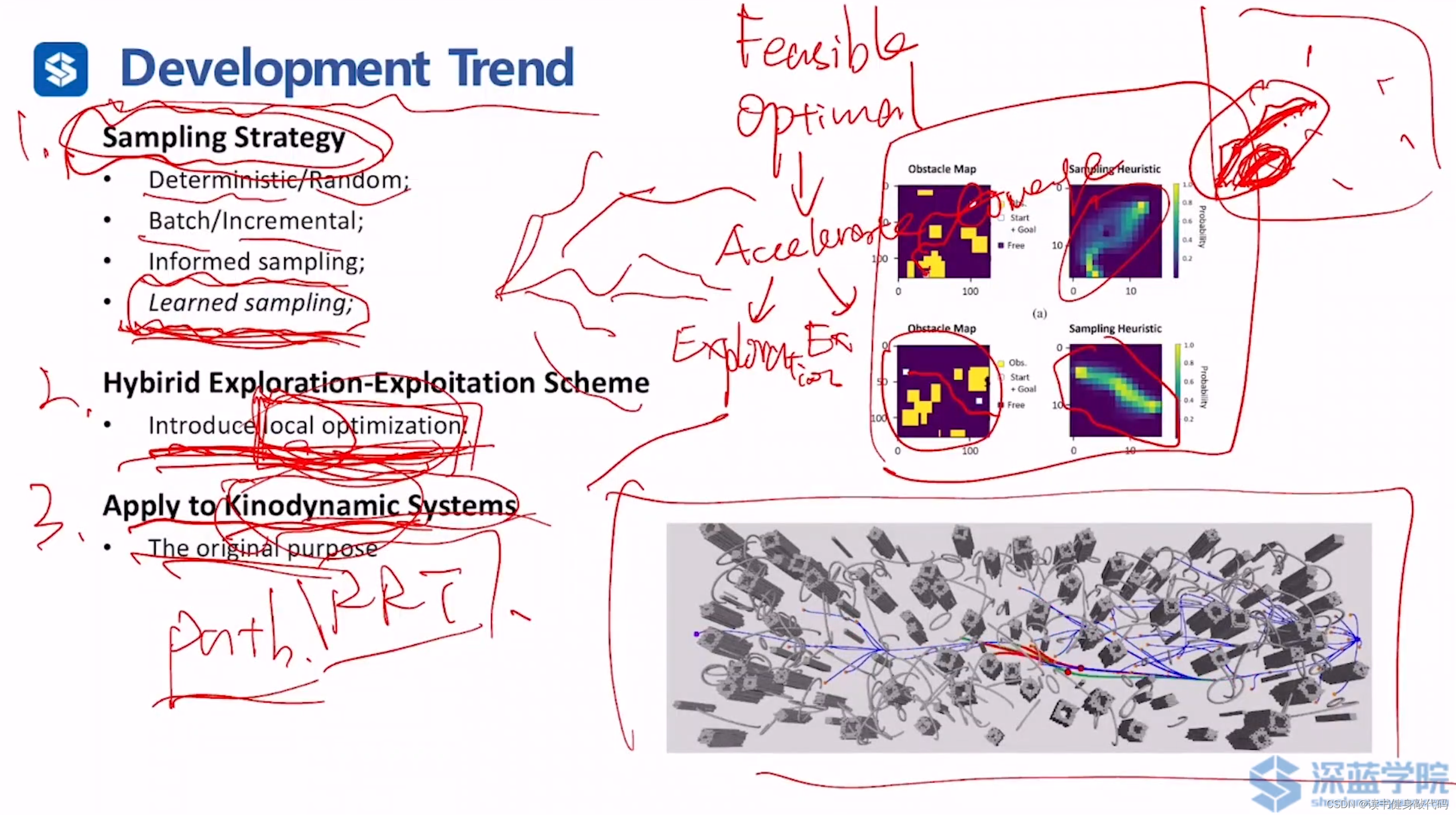
sampling based methods关于Exploration方面的发展比较有潜力:
4. Sampling Strategy:
1. Deterministic/Random:确定的/随机的
2. Batch/Incremental:批量的/增量的
3. Informed sampling
4. Learned sampling(右上图的右侧代表了DL学习出的类似于informed sets的采样范围,当然这类方法还在发展当中,目前可能只能适用于一些简单情况)
- 混合的方法(Exploration和Exploitation混合的方法):如引入局部优化(上右下图引入了局部优化,原来绿色边变为红色边,更顺滑)
- 应用于带有动力学约束的系统:原本RRT提出的初衷就是为了应用于实际的动力学系统。最开始是应用于系统规划,慢慢应用到path planning中。
一些库,框架
- OMPL功能非常强大的一个Motion Planning库,功能强大且完整,在ROS中也有集成。
- Moveit with ROS,使用于机械臂(Manipulation)的MP的库
- Fast-lab(ZJU FAST-lab的库)
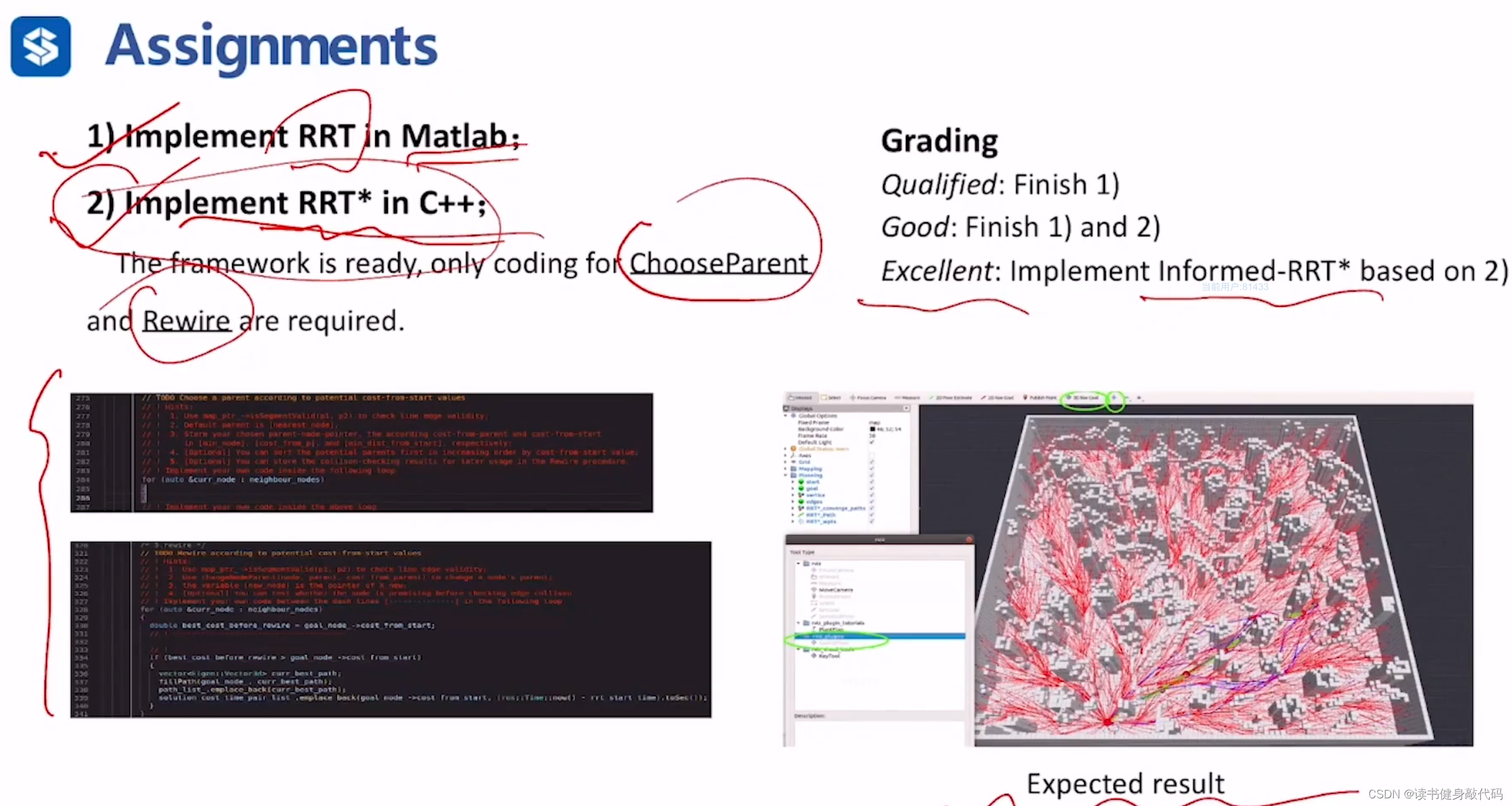
5. Assignment
6. Reference
[1] Karaman, S., & Frazzoli, E. (2010). Incremental Sampling-based Algorithms for Optimal Motion Planning. ArXiv, abs/1005.0416.
[2] Solovey, K., Janson, L., Schmerling, E., Frazzoli, E., & Pavone, M. (2019). Revisiting the Asymptotic Optimality of RRT*. 2020 IEEE International Conference on Robotics and Automation (ICRA), 2189-2195.
课程中提到的参考论文: