ROS—机器人导航实现
1 准备工作
1.1 分布式架构
需要完成分布式框架的搭建并且能正常运行,在PC端可以远程登录机器人端。
1.2 功能包安装
在机器人端安装导航所需功能包:
- 安装 gmapping 包(用于构建地图):
sudo apt install ros-<ROS版本>-gmapping - 安装地图服务包(用于保存与读取地图):
sudo apt install ros-<ROS版本>-map-server - 安装 navigation 包(用于定位以及路径规划):
sudo apt install ros-<ROS版本>-navigation
sudo apt install ros-melodic-gmapping
sudo apt install ros-melodic-map-server
sudo apt install ros-melodic-navigation
安装完毕我们验证是否安装成功:
rospack find gmapping
rospack find map_server
rospack find amcl
rospack find move_base
新建导航功能包(本文名为nav),并导入依赖。
catkin_create_pkg nav roscpp rospy std_msgs gmapping map_server amcl move_base

1.3 机器人模型以及坐标变换
机器人的不同部件有不同的坐标系,我们需要将这些坐标系集成进同一坐标树,实现方案有两种:
- 不同的部件相对于机器人底盘其位置都是固定的,可以通过发布静态坐标变换以实现集成;
- 可以通过加载机器人URDF文件结合 robot_state_publisher、joint_state_publisher实现不同坐标系的集成。
方案1在传感器集成中已做演示,接下来介绍方案2的实现。
1.3.1 创建机器人模型相关的功能包
创建功能包:
catkin_create_pkg mycar_description urdf xacro

1.3.2 准备机器人模型文件
在功能包下新建 urdf 目录,编写具体的 urdf 文件。
文件car.urdf.xacro用于集成不同的机器人部件,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
</robot>
文件car_base.urdf.xacro机器人底盘实现,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="footprint_radius" value="0.001" />
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${footprint_radius}" />
</geometry>
</visual>
</link>
<xacro:property name="base_radius" value="0.1" />
<xacro:property name="base_length" value="0.08" />
<xacro:property name="lidi" value="0.015" />
<xacro:property name="base_joint_z" value="${base_length / 2 + lidi}" />
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="baselink_color">
<color rgba="1.0 0.5 0.2 0.5" />
</material>
</visual>
</link>
<joint name="link2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 0.055" rpy="0 0 0" />
</joint>
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="PI" value="3.1415927" />
<xacro:property name="wheel_joint_z" value="${(base_length / 2 + lidi - wheel_radius) * -1}" />
<xacro:macro name="wheel_func" params="wheel_name flag">
<link name="${wheel_name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0 0 0" rpy="${PI / 2} 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
</material>
</visual>
</link>
<joint name="${wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${wheel_name}_wheel" />
<origin xyz="0 ${0.1 * flag} ${wheel_joint_z}" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro>
<xacro:wheel_func wheel_name="left" flag="1" />
<xacro:wheel_func wheel_name="right" flag="-1" />
<xacro:property name="small_wheel_radius" value="0.0075" />
<xacro:property name="small_joint_z" value="${(base_length / 2 + lidi - small_wheel_radius) * -1}" />
<xacro:macro name="small_wheel_func" params="small_wheel_name flag">
<link name="${small_wheel_name}_wheel">
<visual>
<geometry>
<sphere radius="${small_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
</material>
</visual>
</link>
<joint name="${small_wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${small_wheel_name}_wheel" />
<origin xyz="${0.08 * flag} 0 ${small_joint_z}" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro >
<xacro:small_wheel_func small_wheel_name="front" flag="1"/>
<xacro:small_wheel_func small_wheel_name="back" flag="-1"/>
</robot>
文件car_laser.urdf.xacro机器人雷达实现,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="support_radius" value="0.01" />
<xacro:property name="support_length" value="0.15" />
<xacro:property name="laser_radius" value="0.03" />
<xacro:property name="laser_length" value="0.05" />
<xacro:property name="joint_support_x" value="0" />
<xacro:property name="joint_support_y" value="0" />
<xacro:property name="joint_support_z" value="${base_length / 2 + support_length / 2}" />
<xacro:property name="joint_laser_x" value="0" />
<xacro:property name="joint_laser_y" value="0" />
<xacro:property name="joint_laser_z" value="${support_length / 2 + laser_length / 2}" />
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<material name="yellow">
<color rgba="0.8 0.5 0.0 0.5" />
</material>
</visual>
</link>
<joint name="support2base" type="fixed">
<parent link="base_link" />
<child link="support"/>
<origin xyz="${joint_support_x} ${joint_support_y} ${joint_support_z}" rpy="0 0 0" />
</joint>
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.5" />
</material>
</visual>
</link>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser"/>
<origin xyz="${joint_laser_x} ${joint_laser_y} ${joint_laser_z}" rpy="0 0 0" />
</joint>
</robot>
1.3.3 在launch文件加载机器人模型
launch 文件(文件名称自定义,比如:car.launch)内容示例如下:
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find mycar_description)/urdf/car.urdf.xacro" />
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
</launch>
为了使用方便,还可以将该文件包含进启动机器人的launch文件中,示例如下:
<launch>
<include file="$(find ros_arduino_python)/launch/arduino.launch" />
<include file="$(find rplidar_ros)/launch/rplidar_a1.launch" />
<!-- 机器人模型加载文件 -->
<include file="$(find mycar_description)/launch/car.launch" />
</launch>
1.4 结果演示
2 SLAM建图
2.1 编写gmapping节点相关launch文件
在创建的导航功能包中新建launch目录,并新建launch文件(本文名为gmapping.launch),代码示例如下:
<launch>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<remap from="scan" to="scan"/>
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</launch>
关键代码解释:
<remap from="scan" to="scan"/><!-- 雷达话题 -->
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
2.2 执行
- 执行相关launch文件,启动机器人并加载机器人模型:
roslaunch mycar_start start.launch - 启动地图绘制的 launch 文件:
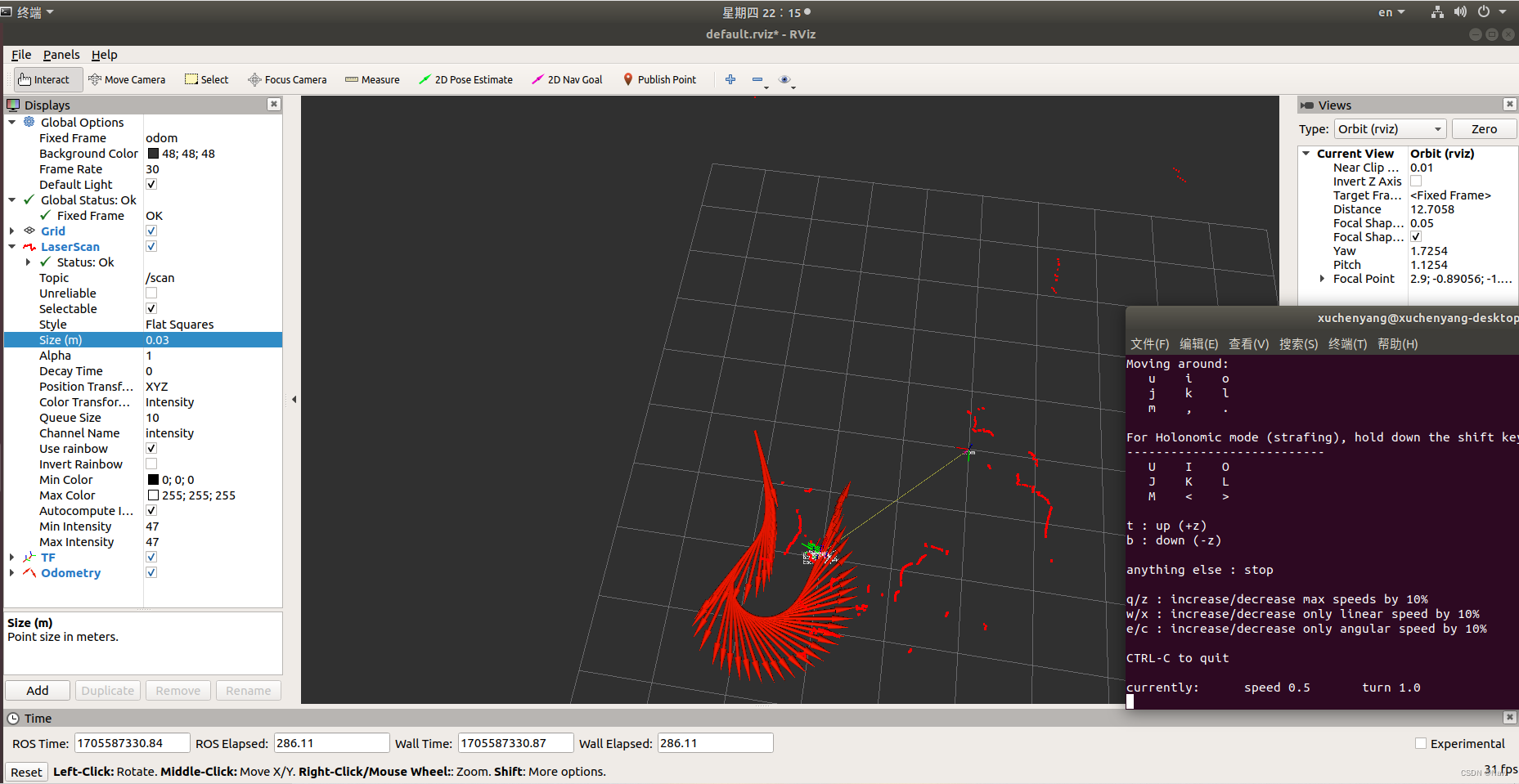
roslaunch nav gmapping.launch - 启动键盘键盘控制节点,用于控制机器人运动建图:
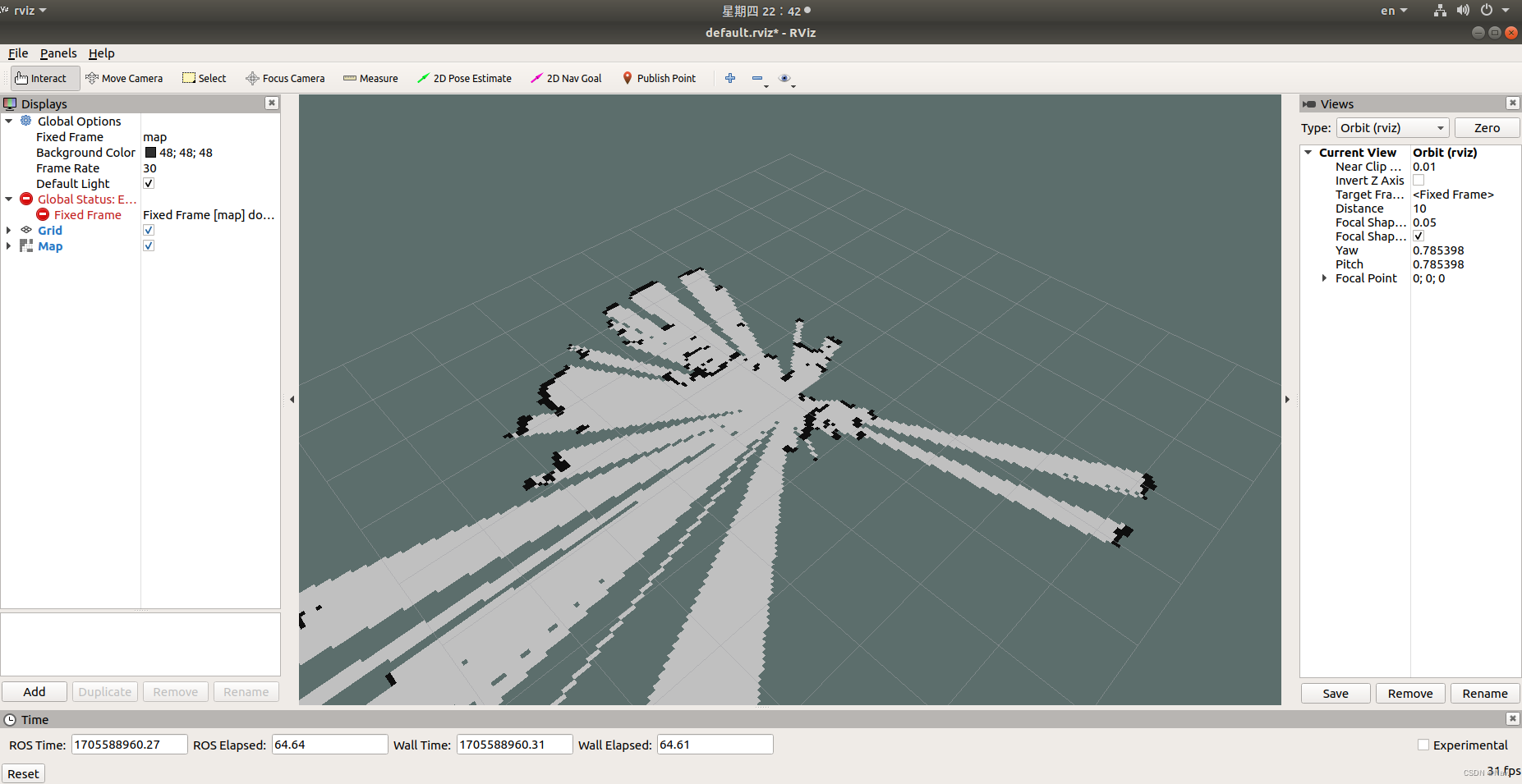
rosrun teleop_twist_keyboard teleop_twist_keyboard.py - 在 rviz 中添加地图显示组件,通过键盘控制机器人运动。同时,在rviz中可以显示gmapping发布的栅格地图数据了。
3 地图服务
3.1 地图保存launch文件
首先在自定义的导航功能包下新建 map 目录,用于保存生成的地图数据。地图保存的语法比较简单,编写一个launch文件(本文名为map_save.launch),内容如下:
<launch>
<arg name="filename" value="$(find nav)/map/nav" />
<node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" />
</launch>
测试:
运行launch文件:
roslaunch nav map_save.launch
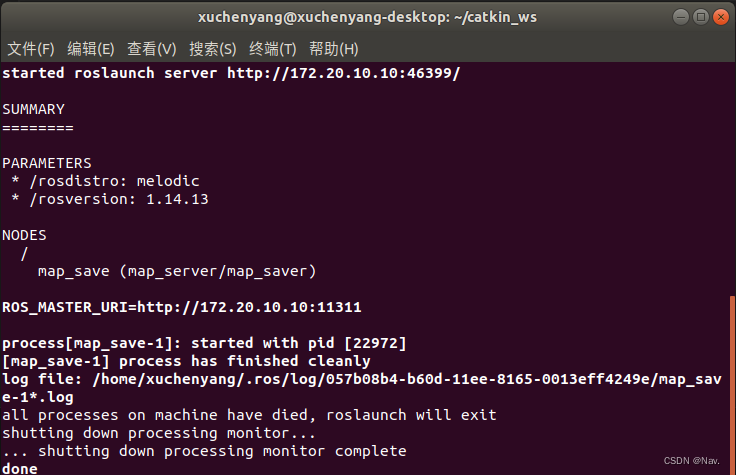
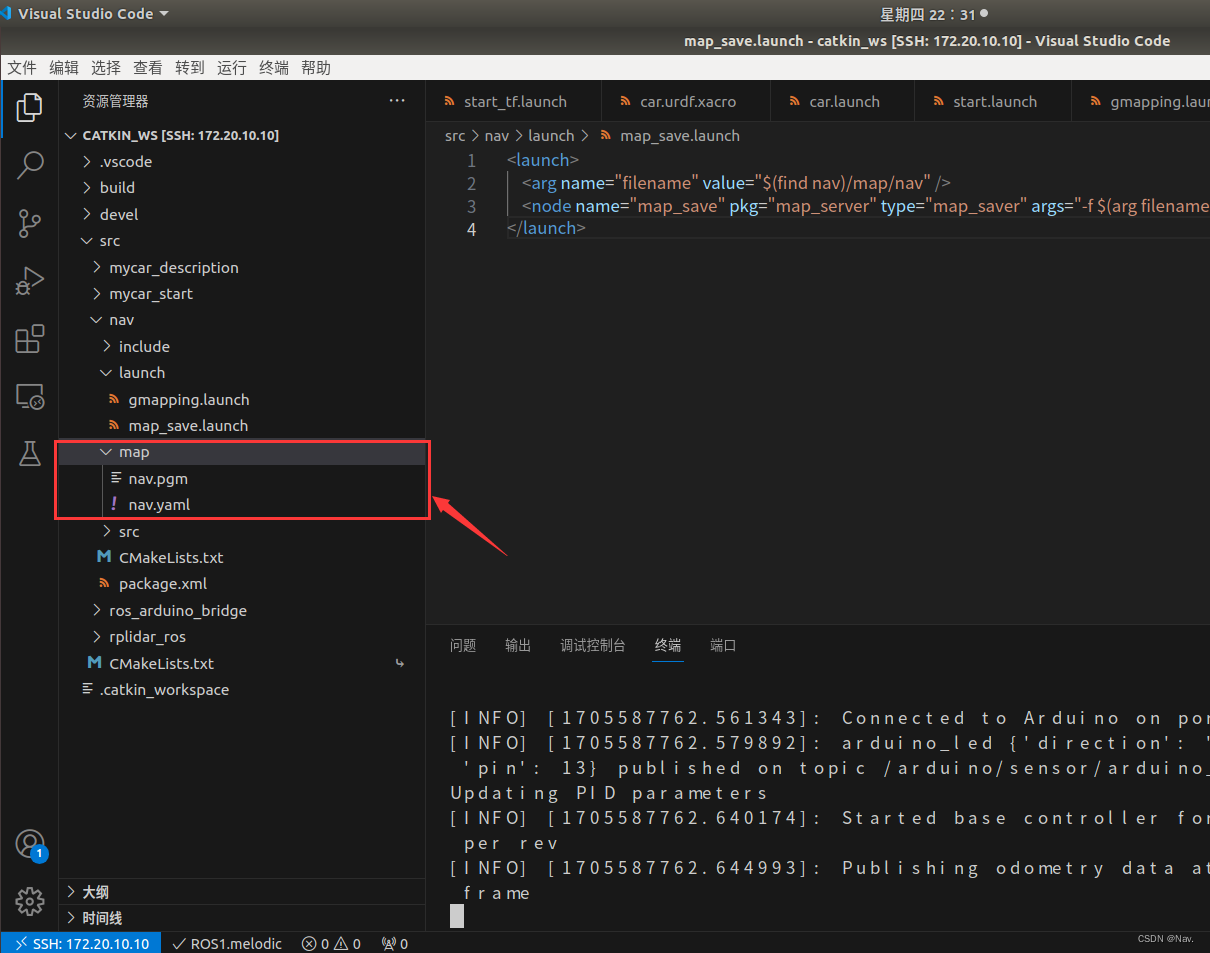
可以看到在指定路径下会生成两个文件,xxx.pgm 与 xxx.yaml。
3.2 地图读取
通过 map_server 的 map_server 节点可以读取栅格地图数据,编写 launch 文件(本文名为map_server.launch)如下:
<launch>
<!-- 设置地图的配置文件 -->
<arg name="map" default="nav.yaml" />
<!-- 运行地图服务器,并且加载设置的地图-->
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav)/map/$(arg map)"/>
</launch>
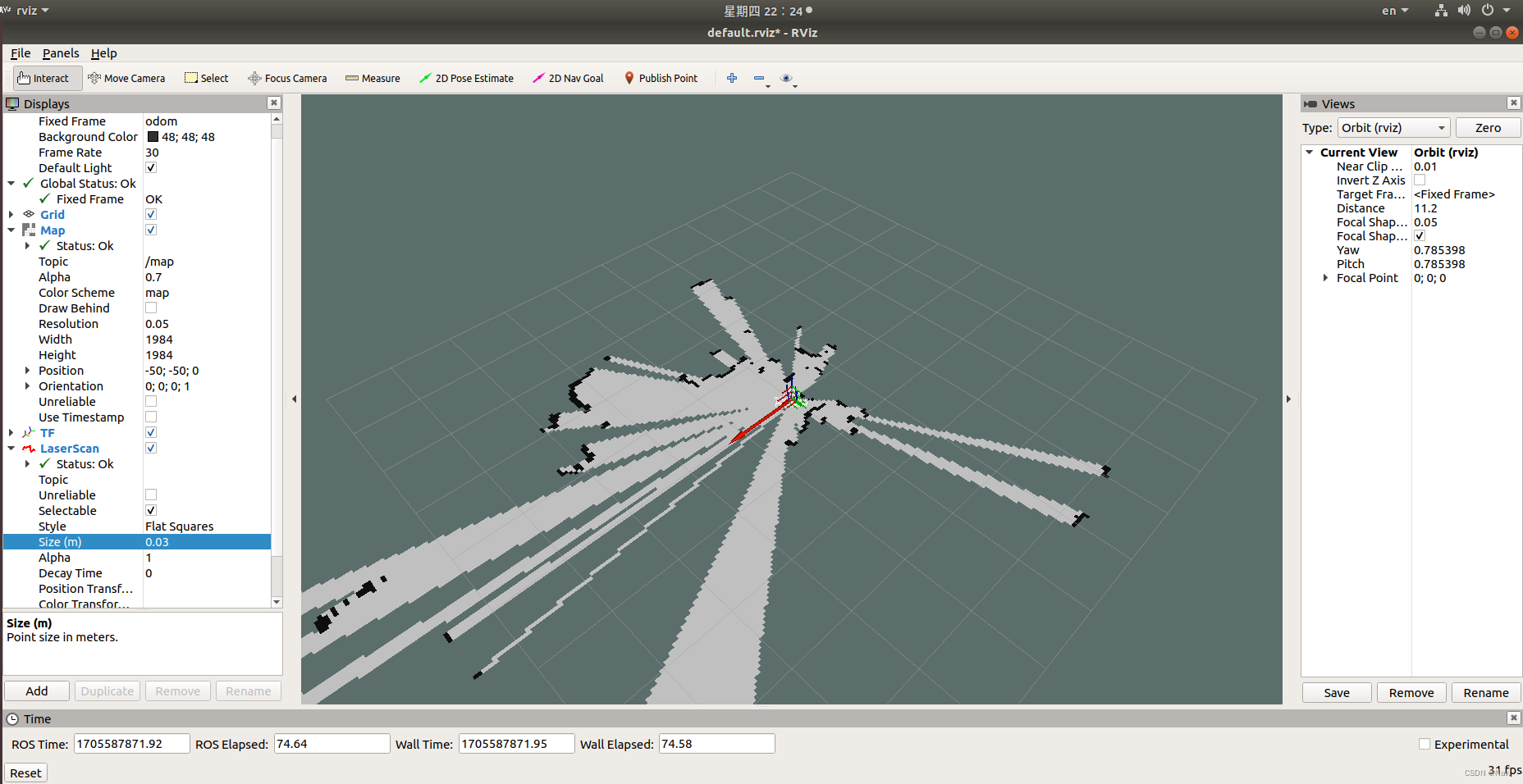
其中参数是地图描述文件的资源路径,执行该launch文件,该节点会发布话 题:map(nav_msgs/OccupancyGrid),最后,在 rviz 中使用 map 组件可以显示栅格地图。
4 定位
在ROS的导航功能包集navigation中提供了 amcl 功能包,用于实现导航中的机器人定位。
4.1 编写amcl节点相关的launch文件
在功能包nav下编写launch文件(本文名为:amcl.launch)。
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 -->
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 -->
<param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 -->
<param name="global_frame_id" value="map"/><!-- 添加地图坐标系 -->
</node>
</launch>
4.2 编写测试launch文件
amcl节点是不可以单独运行的,运行 amcl 节点之前,需要先加载全局地图,然后启动 rviz 显示定位结果,上述节点可以集成进launch文件(本文名为test_amcl.launch),内容示例如下:
<launch>
<!-- 设置地图的配置文件 -->
<arg name="map" default="nav.yaml" />
<!-- 运行地图服务器,并且加载设置的地图-->
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav)/map/$(arg map)"/>
<!-- 启动AMCL节点 -->
<include file="$(find nav)/launch/amcl.launch" />
</launch>
launch文件中地图服务节点和amcl节点中的包名、文件名需要根据自己的设置修改。
4.3 执行
- 执行相关launch文件,启动机器人并加载机器人模型:
roslaunch mycar_start start.launch。 - 启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py。 - 启动上一步中集成地图服务、amcl 的 launch 文件:
roslaunch nav test_amcl.launch。 - 启动rviz并添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
- 通过键盘控制机器人运动,会发现 posearray 也随之而改变。
5 路径规划
路径规划使用 navigation 功能包中的 move_base 功能包。
5.1 编写launch文件
在功能包nav中编写launch文件(本文名为move_base.launch)。
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find nav)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find nav)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find nav)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find nav)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find nav)/param/base_local_planner_params.yaml" command="load" />
</node>
</launch>
5.2 编写配置文件
5.2.1 costmap_common_params.yaml
该文件是 move_base 在全局路径规划与本地路径规划时调用的通用参数,包括:机器人的尺寸、距离障碍物的安全距离、传感器信息等。配置参考如下:
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint
robot_radius: 0.12 #圆形
# footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状
obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图
raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物
#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物
inflation_radius: 0.2
#代价比例系数,越大则代价值越小
cost_scaling_factor: 3.0
#地图类型
map_type: costmap
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
5.2.2 global_costmap_params.yaml
该文件用于全局代价地图参数设置:
global_costmap:
global_frame: map #地图坐标系
robot_base_frame: base_footprint #机器人坐标系
# 以此实现坐标变换
update_frequency: 1.0 #代价地图更新频率
publish_frequency: 1.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.
5.2.3 local_costmap_params.yaml
该文件用于局部代价地图参数设置:
local_costmap:
global_frame: odom #里程计坐标系
robot_base_frame: base_footprint #机器人坐标系
update_frequency: 10.0 #代价地图更新频率
publish_frequency: 10.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: false #不需要静态地图,可以提升导航效果
rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化
width: 3 # 局部地图宽度 单位是 m
height: 3 # 局部地图高度 单位是 m
resolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致
5.2.4 base_local_planner_params
基本的局部规划器参数配置,这个配置文件设定了机器人的最大和最小速度限制值,也设定了加速度的阈值。
TrajectoryPlannerROS:
# Robot Configuration Parameters
max_vel_x: 0.5 # X 方向最大速度
min_vel_x: 0.1 # X 方向最小速度
max_vel_theta: 1.0
min_vel_theta: -1.0
min_in_place_vel_theta: 1.0
acc_lim_x: 1.0 # X 加速限制
acc_lim_y: 0.0 # Y 加速限制
acc_lim_theta: 0.6 # 角速度加速限制
# Goal Tolerance Parameters,目标公差
xy_goal_tolerance: 0.10
yaw_goal_tolerance: 0.05
# Differential-drive robot configuration
# 是否是全向移动机器人
holonomic_robot: false
# Forward Simulation Parameters,前进模拟参数
sim_time: 0.8
vx_samples: 18
vtheta_samples: 20
sim_granularity: 0.05
5.3 launch文件集成
若要实现导航,需要集成地图服务、amcl 、move_base 等,集成示例如下:
<launch>
<!-- 设置地图的配置文件 -->
<arg name="map" default="nav.yaml" />
<!-- 运行地图服务器,并且加载设置的地图-->
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav)/map/$(arg map)"/>
<!-- 启动AMCL节点 -->
<include file="$(find nav)/launch/amcl.launch" />
<!-- 运行move_base节点 -->
<include file="$(find nav)/launch/move_base.launch" />
</launch>
5.4 导航测试
- 执行相关launch文件,启动机器人并加载机器人模型:
roslaunch mycar_start start.launch; - 启动导航相关的 launch 文件:
roslaunch nav nav.launch; - 添加Rviz组件实现导航。