直流电机驱动控制原理
1、电机正反转控制
在STM32中,直流电机的正反转控制主要通过改变电机输入电源的极性来实现。当电机的电压极性发生变化时,电机的旋转方向也会相应改变。在硬件电路中,可以通过继电器或晶体管等电子开关来切换电机的电源极性。
在软件层面,STM32可以通过GPIO引脚的高低电平来控制电机的正反转。例如,当GPIO引脚输出高电平时,电机正转;当输出低电平时,电机反转。通过改变GPIO引脚的电平状态,可以实现电机的正反转控制。
2、电机速度控制
直流电机的速度控制可以通过PWM技术实现。通过调节PWM方波的占空比,可以改变电机输入电压的平均值,从而控制电机的转速。占空比越大,电机转速越快;占空比越小,电机转速越慢。
实验案例
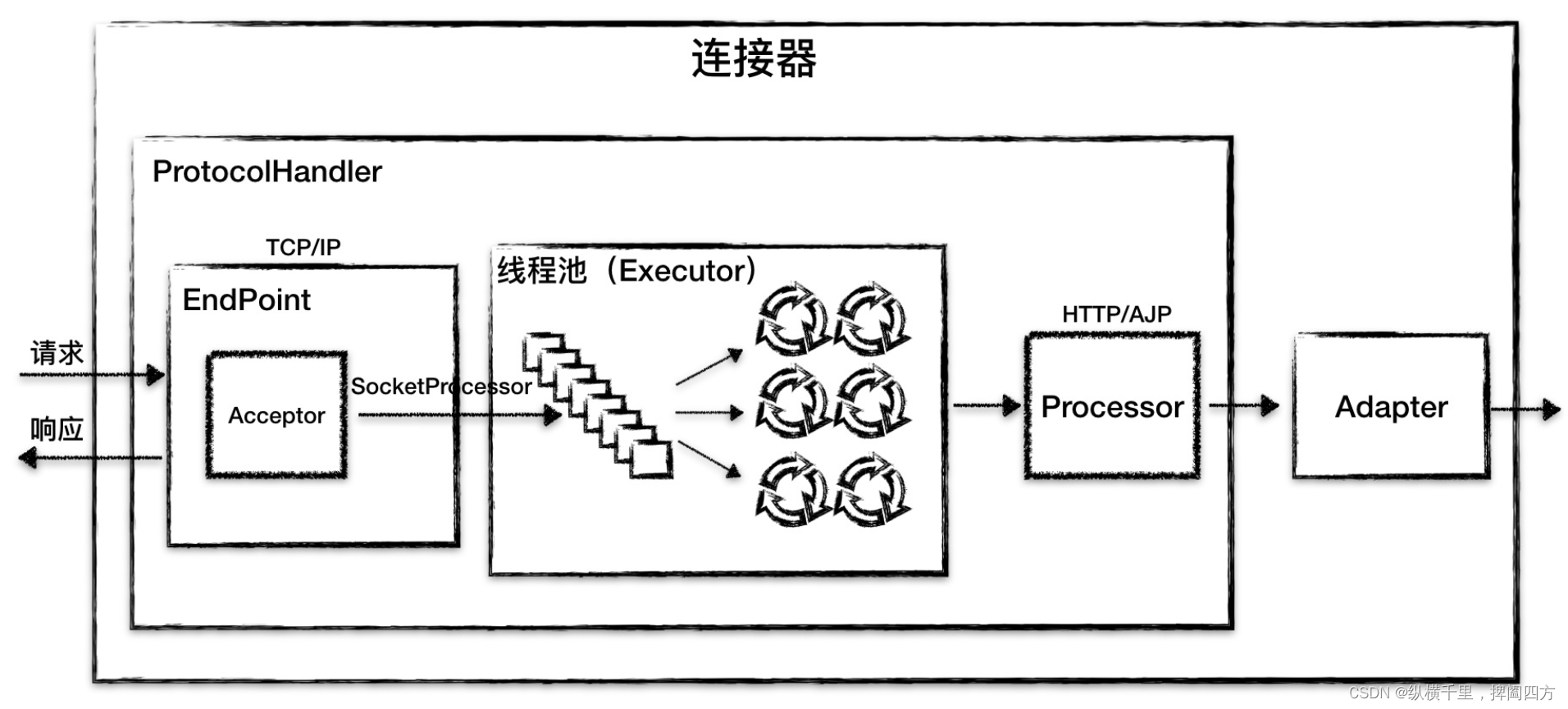
采用ULN2003芯片驱动,通过对ULN2003芯片的输入引脚的电源极性控制,从而控制直流电机的正反转。
-
实验模块:STM32核心板+直流电机
-
电路原理图
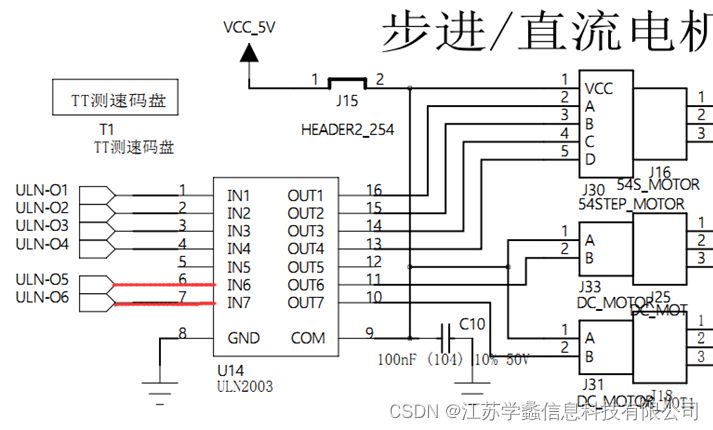
两路直流电机通过ULN2003芯片驱动,控制引脚分别为ULN-O5 ULN-O6
程序源码:
int main(void)
{
delay_init(); //延时函数的初始化
DCMOTOR_Init(); //初始化直流电机端口
while(1)
{
DCMOTOR1=1;
DCMOTOR2=0;
delay_ms(1800);//延时1800ms
DCMOTOR1=0;
DCMOTOR2=1;
delay_ms(1800);//延时1800ms
}
实验现象:
程序运行后,直流电机先正向转动后,停止1.8秒后再反方向转动。
步进电机驱动控制原理
步进电机是通过控制脉冲信号来驱动电机的。在STM32中,控制器通过输出一系列的脉冲信号来控制步进电机的转动。每个脉冲信号对应步进电机的一个步进角度,控制脉冲的数量和频率可以控制电机的转动速度和位置。
STM32控制器通过定时器产生精确的脉冲信号,并通过GPIO引脚输出到步进电机驱动器,其驱动器输入引脚接收。在每个脉冲信号的上升沿或下降沿作用下,步进电机转动一定的角度,从而实现电机的连续或间歇转动。
实验案例
步进电机驱动器是连接控制器和步进电机的中间设备。它接收来自控制器的脉冲信号,并转换为合适的电流和电压,驱动步进电机转动。在实验中ULN2003就是起这个作用,作为“连接的桥梁”——步进电机驱动器。
- 实验模块:STM32核心板+步进电机
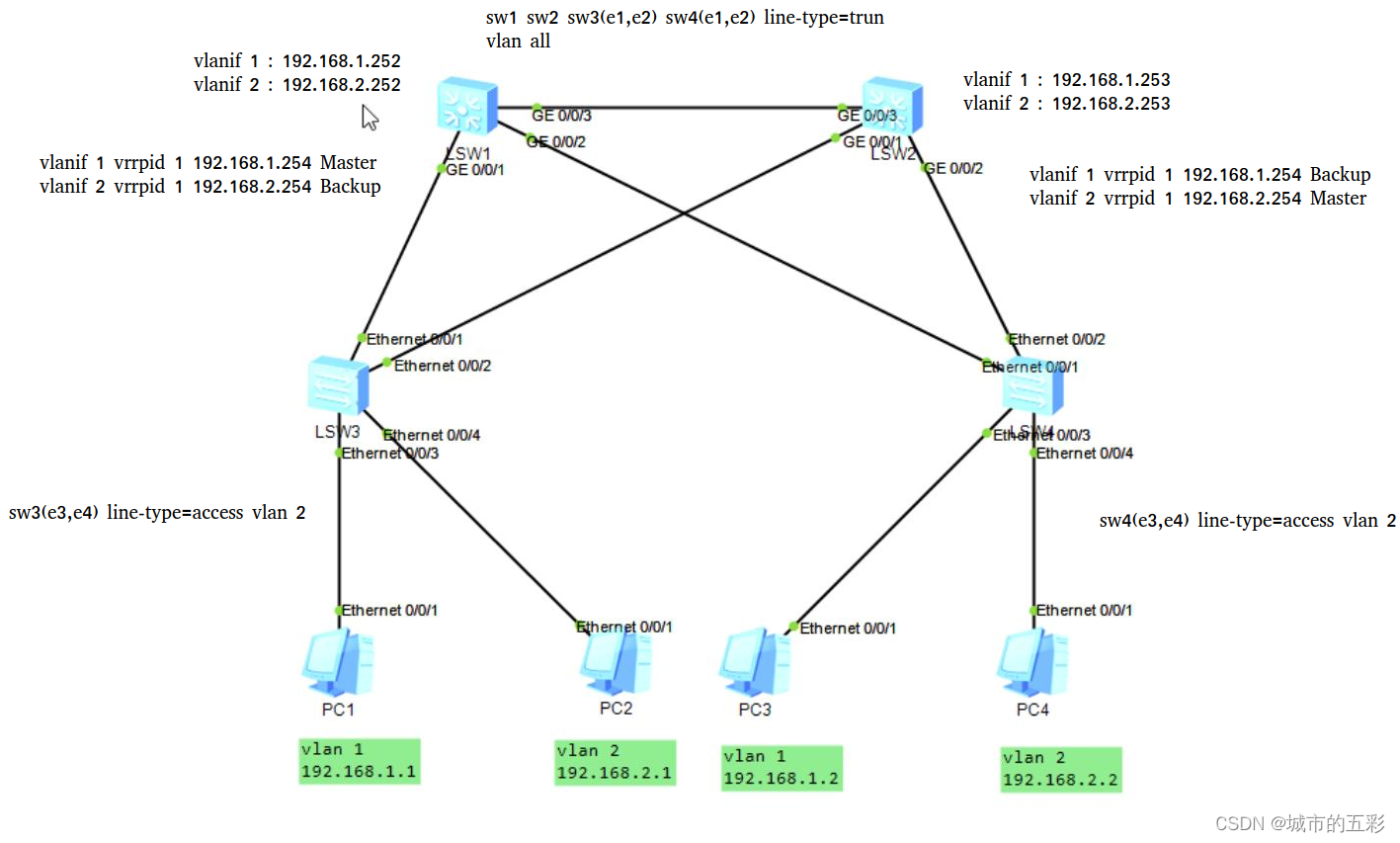
- 电路原理图

步进电机简而言之就是能够通过输入脉冲的个数,确定旋转的角位移,一般用他来控制小车轮子的偏移角度等。步进电机由驱动芯片ULN2003驱动,利用ULN2003与MCU引脚相连,可以驱动步进电机。主要在于放大驱动电流。
其中ULN2003的控制端与单片机的PG6、PG7、PG8、PG9相连接。
程序源码:
1、步进电机驱动函数
void stepper(uint8_t dir,int speed)
{
if(dir == Pos)
{
IN1_HIGH;
delay_ms(speed);
IN1_LOW;
IN2_HIGH;
delay_ms(speed);
IN2_LOW;
IN3_HIGH;
delay_ms(speed);
IN3_LOW;
IN4_HIGH;
delay_ms(speed);
IN4_LOW;
}
else
{
IN1_HIGH;
delay_ms(speed);
IN1_LOW;
IN4_HIGH;
delay_ms(speed);
IN4_LOW;
IN3_HIGH;
delay_ms(speed);
IN3_LOW;
IN2_HIGH;
delay_ms(speed);
IN2_LOW;
}
}
2、主函数
int main(void)
{
delay_init(); //延时函数初始化
MOTOR_Init(); //步进电机IO初始化
while(1)
{
int i;
for(i = 0;i < 1000;i++) //电机正转
stepper(Pos,8); //间隔最少是5ms
delay_ms(1000); //延时
for(i = 0;i < 1000;i++) //电机反转
stepper(Neg,8);
delay_ms(1000); //延时
}
}
实验现象:
可以观察到步进电机首先顺时针运转,随后逆时针运转。




![[嵌入式系统-6]:龙芯1B 开发学习套件 -3-软件层次架构](https://img-blog.csdnimg.cn/direct/813a322b84a74c00ab0613641e71008d.png)