1.统一观测值方程

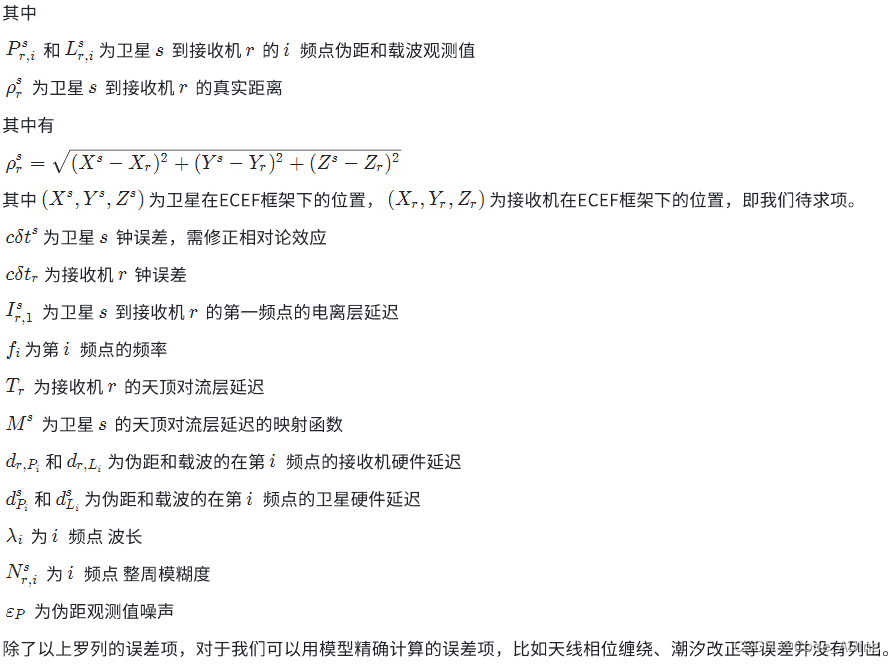
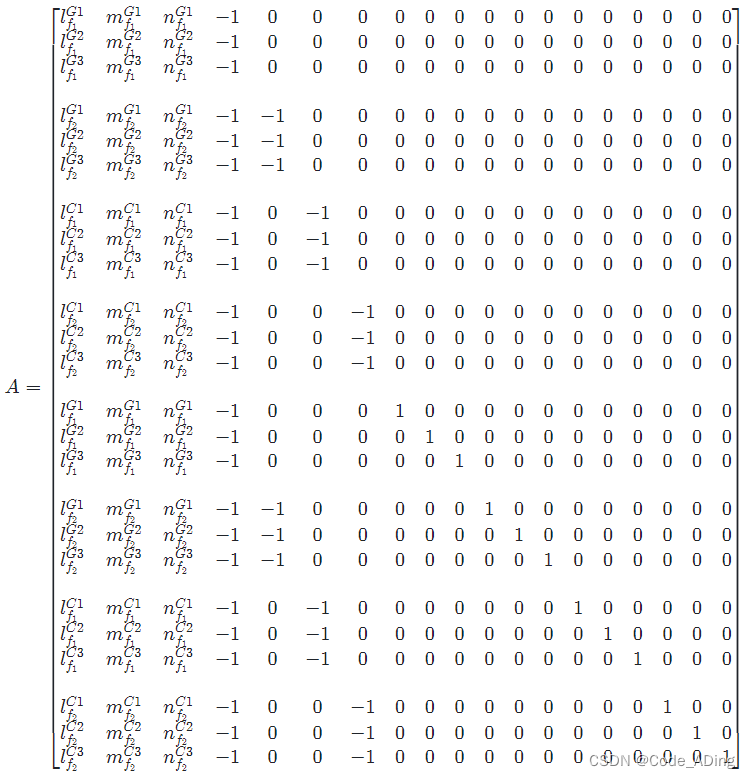
2.PPP方程构建
站间单差方程如下:

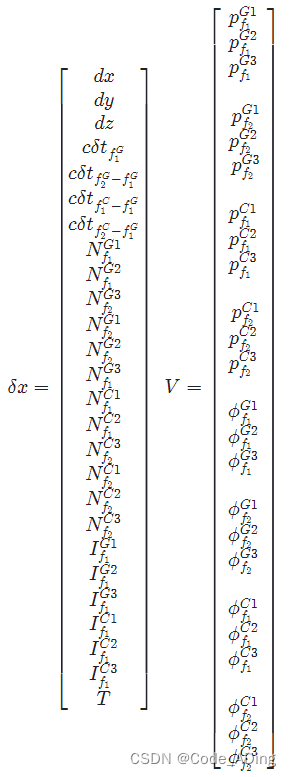
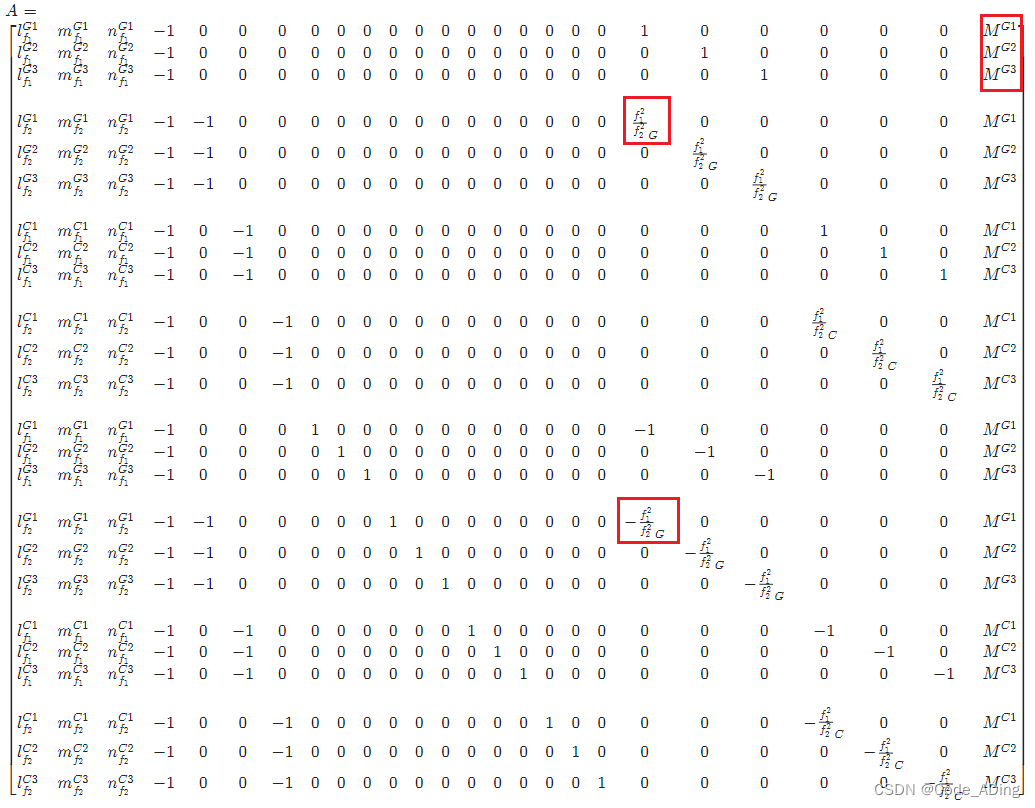
同样的,设计矩阵也更加庞大:
站间单差消除了卫星轨道、卫星钟、电离层、对流层以及卫星端的伪距和载波硬件延迟的影响。但在PPP中,我们无法通过站间单差消除这些影响,所以需要挨个考虑:
3.PPP中的Kalman滤波

4.PPP技术概述
精密单点定位技术(precise point positioning, PPP),可以使用单台接收机在全球任何位置获得高精度的ECEF框架下的绝对坐标。
精密单点定位技术可以免去布设大量的地面参考站网,成本大大减少;
精密单点定位技术所需的精密轨钟产品可以通过GEO卫星播发,不需要设备接入互联网即可获得所需的改正信息,即使在无网地区也可以获得高精度的位置,大大的减小了无网地区(比如海
上、西藏无人区等)获取高精度坐标的难度;
精密单点定位技术估计得到的电离层、对流层等信息,为我们研究大气提供了新的数据来源;
精密单点定位技术得到的是相对于坐标框架的绝对坐标,不受局部地理环境影响,可以很方便我们对地球潮汐、地震等与地理位置相关的地球活动的研究。
但PPP技术也有不可忽略的缺点。
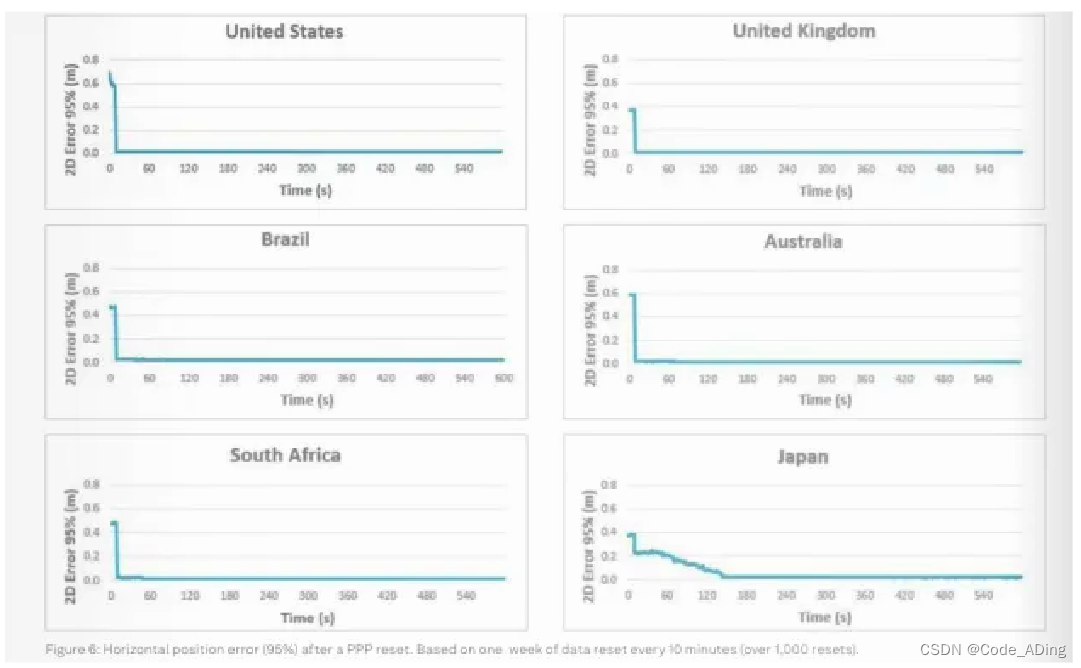
第一个就是获得高精度位置的时间相对较久,即收敛时间比较⻓。
现有的多系统多频点精密单点定位技术模糊度浮点解,大约需要15分钟达到水平10cm的定位精度,而且定位过程中最好没有太多的信号遮挡,即精密单点定位技术对收敛时间和定位环境有比较严苛的要求;
第二个,需要全球布设参考站。
为了在线实时的估计精密轨钟产品,需要全球布设大约上百个全球均匀分布的基准站,并且对基准站数据传回数据处理中心的时延有一定要求。这一条可能是国内商业公司精密单点定位服务的最大阻碍。当然国际GNSS服务组织(IGS, International GNSS Service)一直致力于PPP技术实时化,也免费提供在线实时的全球大量基准站的观测值数据流,供PPP研究人员使用,也极大的推
动了精密单点定位技术的发展。但受限于实时数据流的稳定程度和丢包率,商业服务使用还是存在一定的⻛险。
5.PPPAR技术概述
针对PPP技术第一个缺点,为了加快PPP的收敛速度和提升其定位精度,延伸出了精密单点定位的模糊度固定技术(PPP Ambiguity Resolution, PPPAR)。
在RTK技术中,我们通过站星双差消除硬件延迟(在RTK技术之中,站间单差消除卫星端的硬件延迟;再进行星间双差可以消除接收机端的硬件延迟,但对于使用星间双差的时间,有一定的讲究)的影响,恢复模糊度的整数特性。但对于单站定位(PPP定位),我们只能进行星间单差,消除接收机端的影响,但卫星端的影响无法消除。所以需要额外播发卫星端的相位硬件延迟产品(Uncalibrated Phase Delay,UPD或者称为相位小数部分(FCB,Fractional Cycle Bias)产品。UPD或者FCB产品的估计也依赖地面基准站网,但所需要的站的密度也相对较小。
对于中国区域,50+均匀分布的基准站网即可初步满足中国区域UPD产品的估计。但如果要提供全球PPPAR的服务,也需要一定数量的全球分布的基准站。
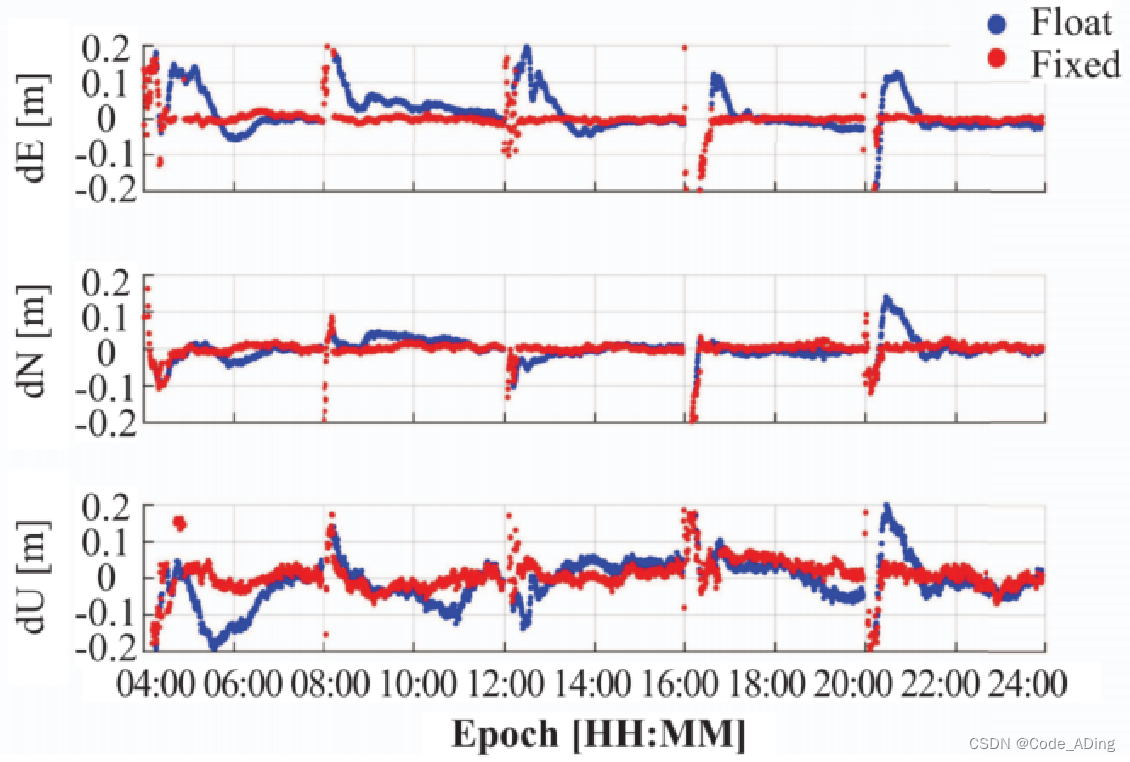
PPPAR技术可以将模糊度浮点解cm-dm的定位精度提升到cm量级,同时可加快收敛速度。收敛时间可缩短到10分钟以内,并且定位精度也有明显的提升。
但现在使用全系统多频点的PPPAR技术可以在小于1min内完成收敛,获得cm级的定位精度。
比如HEXAGON的RTK from the Sky技术(RTK From Sky)(实时RTK在全球范围内带来即时GNSS精度;PPP已成为RTK) 。
比如千寻的快速收敛技术(无区域站也能用!千寻位置PPP技术新突破,实现1分钟快速收敛)
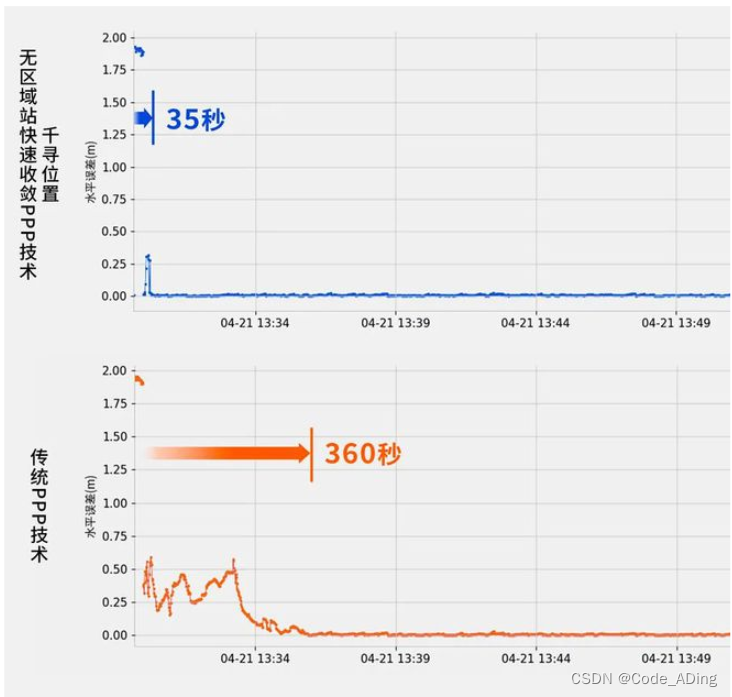
但多频PPPAR要求比较严格,大概率需要测量型接收机以及相对“完美”的周边环境。在消费级使用或者复杂环境下,依然面临着已有的问题,即收敛时间比较久,甚至难以收敛。
6.PPP-RTK技术
收敛慢的主要原因是PPP待估的参数比较多以及精密轨钟残余误差的影响。
所以为了进一步加快收敛,或者为了在消费级模组以及复杂的动态场景下使用PPP技术。又延伸出了PPP-RTK技术。
即在PPPAR的基础上,服务端播发电离层产品和对流层产品,用戶端使用服务端播发的大气产品加快收敛。
但受限于大气产品的时空相关性,需要建立高密度的参考站网才能保证一定的大气产品精度,这就陷入了与网络RTK相同的境地,即需要建立大量的基准站参考网络。有的人宣称,PPP-RTK需要的站密度是要小于网络RTK的站密度,但这是在损失大气精度的基础上。
网络RTK的实质也是区域大气建模与内插,在本质上与PPP-RTK并无太大区别。同时对于高精度的PPP-RTK大气产品,不太能通过GEO有限的带宽播发出去,依然需要接入互联网。
但是PPP-RTK也有其明显的优势,虽然高精度的大气产品无法通过卫星播发,但是低精度的大气产品依然可以通过卫星播发(通过卫星播发就不需要通过网络连接了);
虽然高精度大气产品的通信要求比较大,但我可以把一个区域范围的所有产品下发给到用戶,用戶不需要像网络RTK技术那样上报自身位置,这样在一定程度上可以保护用戶的隐私。
即PPP-RTK技术是一个可分级的、可星基地基同时播发的一套新的定位系统。可以在有互联网环境和缺失的环境无缝切换,这是GNSS技术的发展方向之一。