前言:
IMU里程计和视觉里程计、激光里程计等一样,都可以独立计算里程计信息。求解IMU里程计的步骤可以简单的分为三个模块:IMU运动积分、IMU预积分、IMU初始化。
求解IMU里程计的流程参考自ORB:SLAM3。
IMU运动积分
IMU的运动积分公式如下:
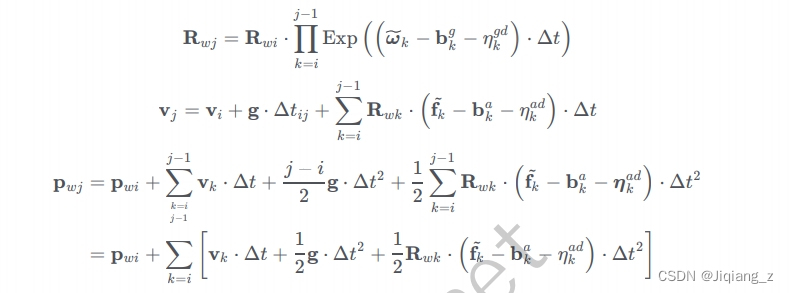
由公式可以看出 :当前时刻的R、V、P都是在上一时刻的R、V、P的基础上推导过来的,且模型中含有向量重力g。
为了使用一段时间的相对量来代替某个时刻的绝对量,且保留重力的影响,于是定义了预积分。
在求完预积分之后,为了消除预积分中重力的影响,于是进行了IMU初始化求解重力信息。
所以,IMU运动积分可以分解为两个部分:IMU预积分和IMU初始化。
IMU预积分
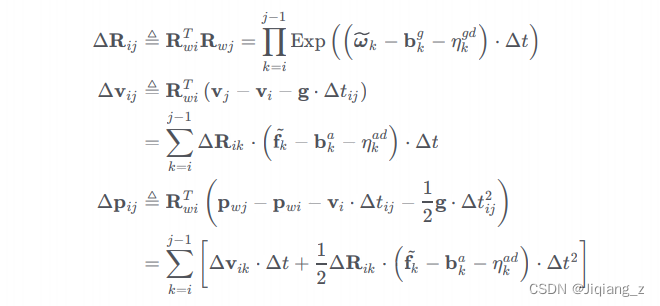
IMU预积分相对于IMU运动积分的特点是:
1、消除了第i时刻对积分的影响。
2、保留重力的影响。
IMU预积分的公式如下:
ORB-SLAM3中对应的代码:
#Preintegrated::IntegrateNewMeasurement函数中
// 考虑偏置后的加速度、角速度
Eigen::Vector3f acc, accW;
acc << acceleration(0) - b.bax, acceleration(1) - b.bay, acceleration(2) - b.baz;
accW << angVel(0) - b.bwx, angVel(1) - b.bwy, angVel(2) - b.bwz;
// Update delta position dP and velocity dV (rely on no-updated delta rotation)
// 根据没有更新的dR来更新dP与dV eq.(38) //note:这里更新顺序为 dP dV dR 不能更换顺序
dP = dP + dV * dt + 0.5f * dR * acc * dt * dt;
dV = dV + dR * acc * dt;
IntegratedRotation dRi(angVel, b, dt);
// 强行归一化使其符合旋转矩阵的格式 当前时刻的R
dR = NormalizeRotation(dR * dRi.deltaR); 预积分中的噪声分离
由于并不知道每个时刻具体的噪声,因此需要进行噪声分离(为了能让预积分操作继续进行)。
待更新