咱们网站的这个公式编辑器,估计是后台生成图片后贴回来的,固定分辨率而且分辨率不高。
还不如先离线 latex 生成 pdf 后再截图上来
1. Why QR
When A and b are known, to solver the minimization of , where
.
The reduction of A to various canonical form via orthogonal transformations should use Householder reflections and Givens rotations.
2. preview on orthogonal matrix
2.1 Orthogonal matrix
is orthogonal matrix, if:
2.2 rotation matrix is orthogonal matrix
If
is orthogonal and
is a rotation matrix.
If , then
is obtained by rotating
counterclockwise through an angle
.
2.3 reflection matrix is orthogonal matrix
is orthogonal and
is a reflection matrix.
If , then
is obtained by reflecting the vector
across the line defined by
That means and
are axial symmetry by S,
x is the preimage, y is the image, S is the mirror surface.
looks like :

%input x, ta = theta
%x = [-sqrt(2)/2.0, sqrt(2)/2.0]
x = [1; 1;]
ta = pi/5
S = [cos(ta/2.0), sin(ta/2.0)]
Q = [cos(ta), sin(ta); sin(ta), -cos(ta);]
y = Q*x
figure;
%1. draw axis
xmin = -2
xmax = 2
ymin = -2
ymax = 2
axisx = xmin:xmax;
axisy = zeros(size(axisx));
plot(axisx, axisy, 'k--', 'LineWidth', 0.7); % Plot x=0 axis
hold on;
plot(axisy, xmin:xmax, 'k--', 'LineWidth', 0.7); % Plot y=0 axis
hold on;
%2. draw surface of mirror
sx = -2*S(1):0.5:2*S(1)
sy = (S(2)/S(1))*sx
plot(sx, sy)
text(sx,sy, 'S')
hold on;
%3. draw preimage
plot(x(1), x(2), 'ro')
text(x(1)+0.1, x(2)+0.1, 'x')
hold on;
%4. draw image
plot(y(1), y(2), 'bo')
text(y(1)+0.1, y(2)+0.1, 'y')
%5. axis label
xlabel("X")
ylabel('Y')
v=[xmin, xmax, ymin, ymax]
axis(v)
%axis on
3. Householder transformation
In section 2, the reflection is introduced from the mirror surface. But, in this section, it is introduced from normal direction.
Let
then is
a
or
or
which are synonyms.
And is the
.
When
is the image from
by reflecting with the hyuperplane
and the mirror surface is cross the
point.
If
let (this is the normal direction)
then ;
约化定理:
Let ,
then st.
and:
约化定理毕;
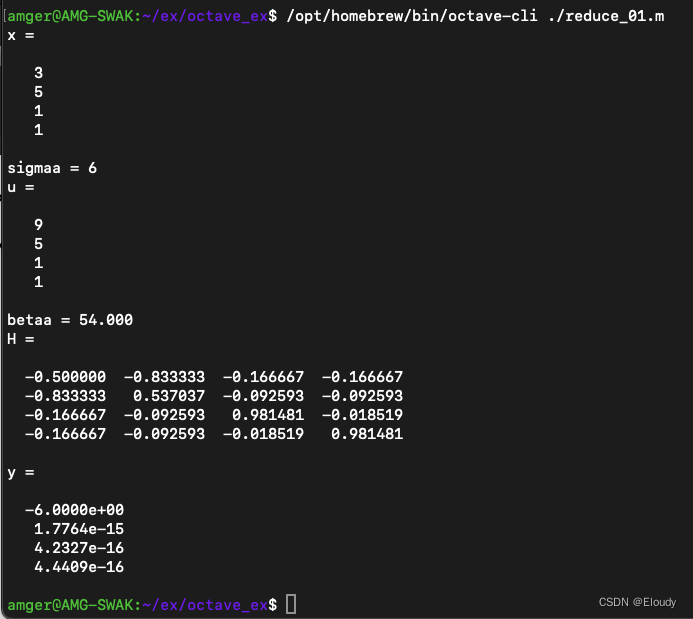
约化定理example:
Let then
, and
to calculate :
then
Here is the matlab code:
reduce_01.m:
x=[3;5;1;1;]
sigmaa =sign(x(1))*norm(x)
u = x+sigmaa*eye(4)(:,1)
betaa = 0.5*(norm(u))^2
H = eye(4) - (1.0/betaa)*u*u'
%debug
%h=betaa*H
y = H*x
未完待续 ... ...