一、一些基础知识
1.蓄电池的容量单位
(1)毫安时mAH
蓄电池的容量一般会采用毫安时(mAH)为单位,比如2000mAH的蓄电池意思是该蓄电池理论上可以以2000mA的电流持续放电1小时,2000mA*1H=2000mAH。当然这个是理论上的,实际上蓄电池容量受到自身寿命状态、外部温度等环境因素影响,标称2000mAH的电池往往不能放出那么多容量的。严格说来,mAH并不是电能量单位,只是个容量单位。
(2)瓦时WH
我们知道,电能量有个单位叫做瓦时(WH)或千瓦时(度)(kWH)。为什么不用瓦时来表示蓄电池容量呢?其实也不是不用,而只是习惯问题,比如现在电动汽车就用度来表示蓄电池容量了。
在小型蓄电池领域,比如18650电池,用度来做单位有点太大了。假设电池电压4V,放电电流1000mA(1A),放一个小时放出的能量才4V*1A*1H=4WH。
此外,蓄电池放电过程中,电压不是恒定不变的,而是一直在变化的,那么就需要用持续积分的方式来计算蓄电池实际放出能量了,操作起来比较麻烦。而放电过程中,放电电流是可以通过放电负载调节来做到恒流放电的。所以mAH听起来是比较直观的。
综合以上种种因素,小型电池领域,我们通常用mAH来做容量单位。
(3)库伦
此外还有个单位库伦C,这个单位是电荷单位,定义是1安培电流持续1秒所流过的电荷量为1库伦,即1C=1A*1s。其和mAH之间的关系就是1mAH=0.001A*3600s=3.6C
二、LTC2944应用知识点
1.LTC2944简单介绍
这个在网上能搜索到一些,累赘再简单介绍,详细介绍可以自行网上查找。
• 可测量累积的电池充电和放电电量
• 3.6V 至 60V 工作范围可适合多节电池
• 14 位 ADC 负责测量电池电压、电流和温度
• 1% 电压、电流和充电准确度
• ±50mV 检测电压范围
• 高压侧检测
• I2C 接口 / SMBus接口
• 适合任何电池化学组成和容量的通用测量
• 可配置警报输出 / 充电完成输入
• 静态电流小于 150μA
• 小外形 8 引线 3mm x 3mm DFN 封装

顺便提一句,这个芯片比较贵,国产有矽力杰的SA59202做Pin-to-Pin的代替,但是很不好买,缺货,也不知道性能差别有多大。
2.芯片结构
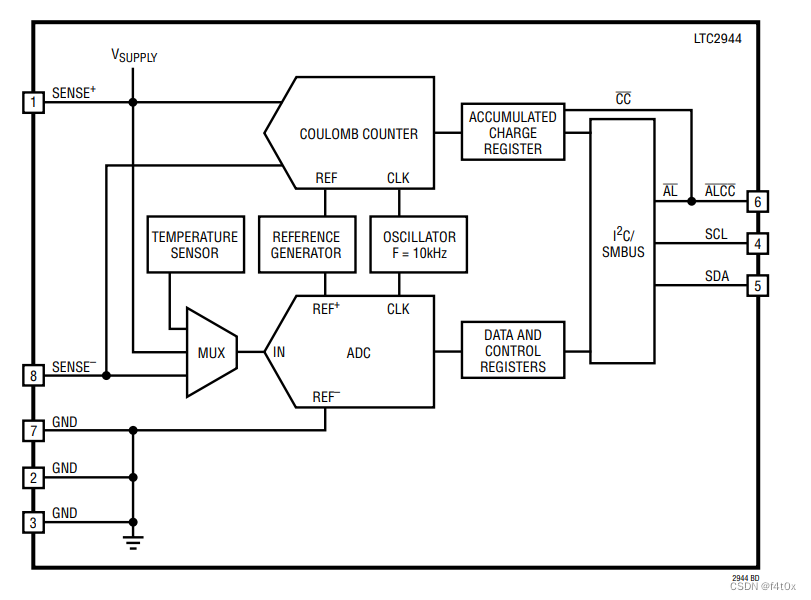
LTC2944内部包含3个主要部分:电量计数器、ADC、I2C通信模块。
(1)电量计数器:比较特别,它是独立于电压、电流、温度传感器的,其工作也是独立的。
因此,可以通过控制寄存器,让ADC停止工作(sleep),而电量计数器在ADC停止后是不会受到影响的,依然会继续计数。也就是说只要芯片通电没有shutdown(该模式后面会讲到),电量计数器就会一直运行。
(2)ADC:ADC可以对电压、电流、温度三个量进行采集,通过ADC前端MUX切换输入源。
(3)I2C通信模块:提供通信功能,对寄存器读写进而控制芯片。
3.内部寄存器表
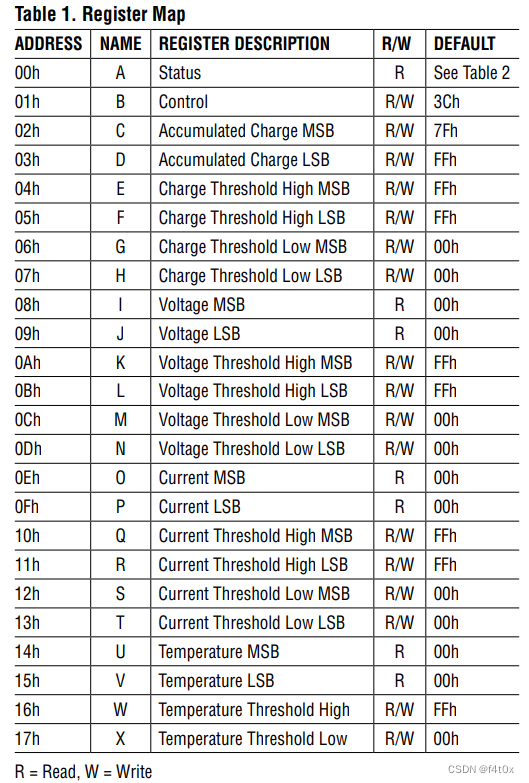
00h:状态寄存器,当发生告警时该寄存器相应位置位;
01h:控制寄存器,控制芯片的工作模式、预定标值、ALCC引脚功能控制;
02h-17h:电量、电压、电流、温度的测量值和累积值,以及告警门限设置。
3.Rsense大小的选择
该芯片的SENSE+和SENSE-引脚之间的最大电压限制在±50mV内,因此你的应用场景下蓄电池的充电和放电最大电流下,在Rsense上产生的压降不要超过这个50mV,否则芯片精度受影响,超过300mV甚至会停止工作(不知道会不会坏掉,手册没说)。
比如2A的最大充电或放电电流,应该Rsense≤(50mV/2A)=25mΩ。
4.寄存器值与实际值之间的计算方法
(1)电压V
电压ADC有效位为16bit,寄存器地址为08h和09h,满量程70.8V,因此Vlsb=70.8/65535。
如果寄存器读出值为B01Ch(十进制45084),那么测量值实际为:
V=45084*70.8/65535≈48.705V
当然这个测量值是在芯片的SENSE-引脚测量到的。

(2)电流I
电流ADC有效位为12bit,寄存器地址为0Eh和0Fh。电流分正负,取决于电池是在充电还是放电状态。
0Fh寄存器的最低4位一直都保持是0,因为ADC只有12bit。所以当寄存器读出FFF0h的时候,代表电流测量的正满量程64mV;当寄存器读出值为0000h时,代表电流测量值为负满量程-64mV。
那么,假设电流的寄存器读出值为Ic,实际测量值的计算方法就是:
I=(64mV/Rsense)*((Ic-32767)/32767)
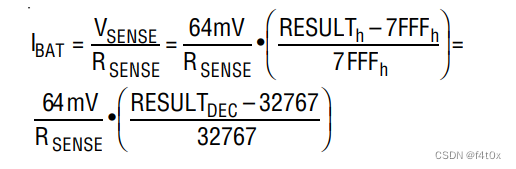
计算结果为正的话,表示在充电;为负的话表示在放电。
(3)电量mAH
电量计数器(ACR)也是16bit,每一bit代表的电量取决于M(prescaler)的值和Rsense的值。
公式如下:
![]()
通过读取ACR的值,乘以Qlsb即可得出当前读数。
在默认值M=4096和Rsense=50mΩ的情况下,计数器加或减1所代表电量变化0.34mAH。
这个0.34怎么来的我也不知道,手册上就是这么说的。
单位为mAH,要换算成库伦自己算。
(4)温度
温度ADC有效位为11位,最低5位始终保持为0,通过下面公式直接算出实际温度:

单位K,要把结果换算成℃的话自己算。
5.芯片工作模式
(1)shutdown模式
控制寄存器bit0设置为1可以将芯片设置为关闭模式,此时整个芯片模拟部分,包括电量计数器、ADC全部停止工作,但是I2C部分保持在工作,芯片耗电量降到最低约15微安。电量计数器ACR在这种模式下不再变化,无法进行电量计量。
(2)ADC模块的四种模式
控制寄存器bit7和bit6组合ADC成4中工作模式:
11:全自动模式,芯片持续进行ADC转换,约30ms完成一次;
10:扫描模式,每10秒进行一次ADC转换,其余时间休眠;
01:人工模式,人为发命令启动才进行一次ADC转换,然后休眠;
00:休眠模式
ADC转换次数越多,耗电越厉害,全自动模式下耗电约1mA,详见手册。
三、驱动程序
1.驱动源码
芯片了解完成终于要动手编写驱动了。Linear(已被ADI收购)专门为该芯片提供了一份驱动程序,地址:LTC2944 数据手册和产品信息 | 亚德诺(ADI)半导体

但是这个程序是Linduino平台的,这个东东咱也没用过,但是源码还是可以参考下的。
下面我们把链接上的LTC2944.h和LTC2944.cpp下载下来进行改造。
详细的改造过程省略了,对改造过程感兴趣的可以对比下下面代码和原来的代码之间的差异。
主要改造4个函数:
int8_t LTC2944_write(uint8_t i2c_address, uint8_t adc_command, uint8_t code);
int8_t LTC2944_write_16_bits(uint8_t i2c_address, uint8_t adc_command, uint16_t code);
int8_t LTC2944_read(uint8_t i2c_address, uint8_t adc_command, uint8_t *adc_code);
int8_t LTC2944_read_16_bits(uint8_t i2c_address, uint8_t adc_command, uint16_t *adc_code)
这4个函数是对总线的操作,改造内容是把I2C的操作方法改成Wire方法,其他函数基本都是内部计算函数,不用改造。其他的改造内容都是为了方便使用而改造的,包括增加一些操作函数。
直接给出改造后的源码如下。
LTC2944.h
#ifndef LTC2944_h
#define LTC2944_h
#include "Arduino.h"
#include "Wire.h"
#define I2C_ADDRESS_LTC2944 0x64
//#define I2C_ADDR_LTC2944 144
//Registers
#define LTC2944_STATUS_REG 0x00
#define LTC2944_CONTROL_REG 0x01
#define LTC2944_ACCUM_CHARGE_MSB_REG 0x02
#define LTC2944_ACCUM_CHARGE_LSB_REG 0x03
#define LTC2944_CHARGE_THRESH_HIGH_MSB_REG 0x04
#define LTC2944_CHARGE_THRESH_HIGH_LSB_REG 0x05
#define LTC2944_CHARGE_THRESH_LOW_MSB_REG 0x06
#define LTC2944_CHARGE_THRESH_LOW_LSB_REG 0x07
#define LTC2944_VOLTAGE_MSB_REG 0x08
#define LTC2944_VOLTAGE_LSB_REG 0x09
#define LTC2944_VOLTAGE_THRESH_HIGH_MSB_REG 0x0A
#define LTC2944_VOLTAGE_THRESH_HIGH_LSB_REG 0x0B
#define LTC2944_VOLTAGE_THRESH_LOW_MSB_REG 0x0C
#define LTC2944_VOLTAGE_THRESH_LOW_LSB_REG 0x0D
#define LTC2944_CURRENT_MSB_REG 0x0E
#define LTC2944_CURRENT_LSB_REG 0x0F
#define LTC2944_CURRENT_THRESH_HIGH_MSB_REG 0x10
#define LTC2944_CURRENT_THRESH_HIGH_LSB_REG 0x11
#define LTC2944_CURRENT_THRESH_LOW_MSB_REG 0x12
#define LTC2944_CURRENT_THRESH_LOW_LSB_REG 0x13
#define LTC2944_TEMPERATURE_MSB_REG 0x14
#define LTC2944_TEMPERATURE_LSB_REG 0x15
#define LTC2944_TEMPERATURE_THRESH_HIGH_REG 0x16
#define LTC2944_TEMPERATURE_THRESH_LOW_REG 0x17
// Command Codes
#define LTC2944_AUTOMATIC_MODE 0xC0
#define LTC2944_SCAN_MODE 0x80
#define LTC2944_MANUAL_MODE 0x40
#define LTC2944_SLEEP_MODE 0x00
#define LTC2944_PRESCALAR_M_1 0x00
#define LTC2944_PRESCALAR_M_4 0x08
#define LTC2944_PRESCALAR_M_16 0x10
#define LTC2944_PRESCALAR_M_64 0x18
#define LTC2944_PRESCALAR_M_256 0x20
#define LTC2944_PRESCALAR_M_1024 0x28
#define LTC2944_PRESCALAR_M_4096 0x30
#define LTC2944_PRESCALAR_M_4096_2 0x31
#define LTC2944_ALERT_MODE 0x04
#define LTC2944_CHARGE_COMPLETE_MODE 0x02
#define LTC2944_DISABLE_ALCC_PIN 0x00
#define LTC2944_SHUTDOWN_MODE 0x01
#define LTC2944_SHUTDOWN_MODE_UNDO 0x00
class I2CLTC2944
{
public:
I2CLTC2944(TwoWire * ptrI2CBus)
{
_ptrI2CBus=ptrI2CBus;
}
int8_t LTC2944_write(uint8_t i2c_address, uint8_t adc_command, uint8_t code);
int8_t LTC2944_write_16_bits(uint8_t i2c_address, uint8_t adc_command, uint16_t code);
int8_t LTC2944_read(uint8_t i2c_address, uint8_t adc_command, uint8_t *adc_code);
int8_t LTC2944_read_16_bits(uint8_t i2c_address, uint8_t adc_command, uint16_t *adc_code);
float LTC2944_code_to_coulombs(uint16_t adc_code, float resistor, uint16_t prescalar);
float LTC2944_code_to_mAh(uint16_t adc_code, float resistor, uint16_t prescalar );
float LTC2944_code_to_voltage(uint16_t adc_code);
float LTC2944_code_to_current(uint16_t adc_code, float resistor);
float LTC2944_code_to_kelvin_temperature(uint16_t adc_code);
float LTC2944_code_to_celcius_temperature(uint16_t adc_code);
int8_t LTC2944_register_set_clear_bits(uint8_t i2c_address, uint8_t register_address, uint8_t bits_to_set, uint8_t bits_to_clear);
int8_t LTC2944_set_mode(uint8_t i2c_address,uint8_t mode);
int8_t LTC2944_set_prescalar(uint8_t i2c_address,uint16_t prescalarVal);
int8_t LTC2944_set_ALCC(uint8_t i2c_address,uint8_t ALCCMode);
int8_t LTC2944_set_shutdown(uint8_t i2c_address,uint8_t shutdown);
int8_t LTC2944_set_ACR_full(uint8_t i2c_address);
private:
TwoWire * _ptrI2CBus;
};
#endifLTC2944.cpp
#include "Arduino.h"
#include "LTC2944.h"
//Conversion Constants
const float LTC2944_CHARGE_lsb = 0.34E-3;
const float LTC2944_VOLTAGE_lsb = 1.068E-3;
const float LTC2944_CURRENT_lsb = 29.3E-6;
const float LTC2944_TEMPERATURE_lsb = 0.25;
const float LTC2944_FULLSCALE_VOLTAGE = 70;
const float LTC2944_FULLSCALE_CURRENT = 60E-3;
const float LTC2944_FULLSCALE_TEMPERATURE = 510;
const float resistor = .020; //!< resistor value
int8_t I2CLTC2944::LTC2944_write(uint8_t i2c_address, uint8_t adc_command, uint8_t code)
{
// Write an 8-bit code to the LTC2944.
// The function returns the state of the acknowledge bit after the I2C address write. 0=acknowledge, 1=no acknowledge.
int32_t ack;
//ack = i2c_write_byte_data(i2c_address, adc_command, code);
_ptrI2CBus->beginTransmission(i2c_address);
_ptrI2CBus->write(adc_command);
_ptrI2CBus->write(code);
ack=_ptrI2CBus->endTransmission(true);
return(ack);
}
int8_t I2CLTC2944::LTC2944_write_16_bits(uint8_t i2c_address, uint8_t adc_command, uint16_t code)
{
// Write a 16-bit code to the LTC2944.
// The function returns the state of the acknowledge bit after the I2C address write. 0=acknowledge, 1=no acknowledge.
int8_t ack;
//ack = i2c_write_word_data(i2c_address, adc_command, code);
_ptrI2CBus->beginTransmission(i2c_address);
_ptrI2CBus->write(adc_command);
_ptrI2CBus->write(code);
ack=_ptrI2CBus->endTransmission(true);
return(ack);
}
int8_t I2CLTC2944::LTC2944_read(uint8_t i2c_address, uint8_t adc_command, uint8_t *adc_code)
{
// Reads an 8-bit adc_code from LTC2944
// The function returns the state of the acknowledge bit after the I2C address write. 0=acknowledge, 1=no acknowledge.
int32_t ack;
//ack = i2c_read_byte_data(i2c_address, adc_command, adc_code);
_ptrI2CBus->flush();
_ptrI2CBus->beginTransmission(i2c_address);
_ptrI2CBus->write(adc_command);
ack=_ptrI2CBus->endTransmission(false);
uint8_t bytesReceived=0;
bytesReceived=_ptrI2CBus->requestFrom(i2c_address,1);
if(bytesReceived==1)
{
*adc_code=_ptrI2CBus->read();
}
else
{
//Serial.println("LTC2944_read reply error!");
}
return(ack);
}
int8_t I2CLTC2944::LTC2944_read_16_bits(uint8_t i2c_address, uint8_t adc_command, uint16_t *adc_code)
{
// Reads a 16-bit adc_code from LTC2944
// The function returns the state of the acknowledge bit after the I2C address write. 0=acknowledge, 1=no acknowledge.
int32_t ack;
//ack = i2c_read_word_data(i2c_address, adc_command, adc_code);
_ptrI2CBus->flush();
_ptrI2CBus->beginTransmission(i2c_address);
_ptrI2CBus->write(adc_command);
ack=_ptrI2CBus->endTransmission(false);
uint8_t bytesReceived=0;
uint8_t temp[2];
bytesReceived=_ptrI2CBus->requestFrom(i2c_address,2);
if(bytesReceived==2)
{
temp[0]=_ptrI2CBus->read();
//Serial.print("MSB=");Serial.println(temp[0]);
temp[1]=_ptrI2CBus->read();
//Serial.print("LSB=");Serial.println(temp[1]);
//_ptrI2CBus->readBytes(temp, bytesReceived);
*adc_code=temp[0]*256+temp[1];
}
else
{
//Serial.print("read NOT 2 bytes! recv bytes=");Serial.println(bytesReceived);
}
return(ack);
}
float I2CLTC2944::LTC2944_code_to_coulombs(uint16_t adc_code, float resistor, uint16_t prescalar)
{
// The function converts the 16-bit RAW adc_code to Coulombs
float coulomb_charge;
coulomb_charge = 1000*(float)(adc_code*LTC2944_CHARGE_lsb*prescalar*50E-3)/(resistor*4096);
coulomb_charge = coulomb_charge*3.6f;
return(coulomb_charge);
}
float I2CLTC2944::LTC2944_code_to_mAh(uint16_t adc_code, float resistor, uint16_t prescalar )
{
// The function converts the 16-bit RAW adc_code to mAh
float mAh_charge;
mAh_charge = 1000*(float)(adc_code*LTC2944_CHARGE_lsb*prescalar*50E-3)/(resistor*4096);
return(mAh_charge);
}
float I2CLTC2944::LTC2944_code_to_voltage(uint16_t adc_code)
{
// The function converts the 16-bit RAW adc_code to Volts
float voltage;
voltage = ((float)adc_code/(65535))*LTC2944_FULLSCALE_VOLTAGE;
return(voltage);
}
float I2CLTC2944::LTC2944_code_to_current(uint16_t adc_code, float resistor)
{
// The function converts the 16-bit RAW adc_code to Amperes
float current;
current = (((float)adc_code-32767)/(32767))*((float)(LTC2944_FULLSCALE_CURRENT)/resistor);
return(current);
}
float I2CLTC2944::LTC2944_code_to_kelvin_temperature(uint16_t adc_code)
{
// The function converts the 16-bit RAW adc_code to Kelvin
float temperature;
temperature = adc_code*((float)(LTC2944_FULLSCALE_TEMPERATURE)/65535);
return(temperature);
}
float I2CLTC2944::LTC2944_code_to_celcius_temperature(uint16_t adc_code)
{
// The function converts the 16-bit RAW adc_code to Celcius
float temperature;
temperature = adc_code*((float)(LTC2944_FULLSCALE_TEMPERATURE)/65535) - 273.15;
return(temperature);
}
int8_t I2CLTC2944::LTC2944_register_set_clear_bits(uint8_t i2c_address, uint8_t register_address, uint8_t bits_to_set, uint8_t bits_to_clear)
{
// Used to set and clear bits in a control register. bits_to_set will be bitwise OR'd with the register.
// bits_to_clear will be inverted and bitwise AND'd with the register so that every location with a 1 will result in a 0 in the register.
uint8_t register_data;
int8_t ack = 0;
ack |= LTC2944_read(i2c_address, register_address, ®ister_data);
register_data = register_data & (~bits_to_clear);
register_data = register_data | bits_to_set;
ack |= LTC2944_write(i2c_address, register_address, register_data);
return(ack);
}
int8_t I2CLTC2944::LTC2944_set_mode(uint8_t i2c_address,uint8_t mode)
{
//"mode" must be one of the defined symbols:
// LTC2944_AUTOMATIC_MODE,LTC2944_SCAN_MODE,LTC2944_MANUAL_MODE,LTC2944_SLEEP_MODE
uint8_t curCode;
uint8_t setCode;
int8_t ack = 0;
ack |= LTC2944_read(i2c_address, LTC2944_CONTROL_REG, &curCode);
setCode = mode | (curCode & B00111111);//B[7:6]
ack |= LTC2944_write(i2c_address, LTC2944_CONTROL_REG, setCode);
return(ack);
}
int8_t I2CLTC2944::LTC2944_set_prescalar(uint8_t i2c_address,uint16_t prescalarVal)
{
//"prescalarVal" must be one of the defined symbols:
// LTC2944_PRESCALAR_M_1,LTC2944_PRESCALAR_M_4,LTC2944_PRESCALAR_M_16
// LTC2944_PRESCALAR_M_64,LTC2944_PRESCALAR_M_256,LTC2944_PRESCALAR_M_1024
// LTC2944_PRESCALAR_M_4096
uint8_t curCode;
uint8_t setCode;
int8_t ack = 0;
LTC2944_read(i2c_address,LTC2944_CONTROL_REG,&curCode);
setCode = prescalarVal | (curCode & B11000111);//B[5:3]
ack |= LTC2944_write(i2c_address, LTC2944_CONTROL_REG, setCode);
return(ack);
}
int8_t I2CLTC2944::LTC2944_set_ALCC(uint8_t i2c_address,uint8_t ALCCMode)
{
//"ALCCMode" must be one of the defined symbols:
// LTC2944_ALERT_MODE,LTC2944_CHARGE_COMPLETE_MODE,LTC2944_DISABLE_ALCC_PIN,LTC2944_SHUTDOWN_MODE
uint8_t curCode;
uint8_t setCode;
int8_t ack = 0;
ack |= LTC2944_read(i2c_address, LTC2944_CONTROL_REG, &curCode);
setCode = ALCCMode | (curCode & B11111001);//B[2:1]
ack |= LTC2944_write(i2c_address, LTC2944_CONTROL_REG, setCode);
return(ack);
}
int8_t I2CLTC2944::LTC2944_set_shutdown(uint8_t i2c_address,uint8_t shutdown)
{
//"ALCCMode" must be one of the defined symbols:
// LTC2944_SHUTDOWN_MODE,LTC2944_SHUTDOWN_MODE_UNDO
uint8_t curCode;
uint8_t setCode;
int8_t ack = 0;
ack |= LTC2944_read(i2c_address, LTC2944_CONTROL_REG, &curCode);
setCode = shutdown | (curCode & B11111110);//B[0]
ack |= LTC2944_write(i2c_address, LTC2944_CONTROL_REG, setCode);
return(ack);
}
int8_t I2CLTC2944::LTC2944_set_ACR_full(uint8_t i2c_address)
{
//set ACR to 0xFFFF
uint8_t curCode;
uint8_t setCode;
int8_t ack = 0;
ack |= LTC2944_write(i2c_address, LTC2944_ACCUM_CHARGE_MSB_REG, 0xff);
ack |= LTC2944_write(i2c_address, LTC2944_ACCUM_CHARGE_LSB_REG, 0xff);
return(ack);
}
2.调用方法及测试代码
编写测试代码如下。注意我的Rsense=20mΩ,M的值保持为默认值4096我没有修改它。
#include "Wire.h"
#include "LTC2944.h"
I2CLTC2944 objI2CLTC2944(&Wire1);
const float resistor = .020; //我的Rsense是20毫欧的
void setup() {
Serial.begin(115200);
pinMode(14,OUTPUT);
digitalWrite(14,HIGH);//打开外围设备供电,用不到就删掉
uint8_t data;
uint16_t data16;
float voltage;
int8_t reply;
Wire1.begin(41,42);//改成你自己的I2C总线引脚
delay(1000);
objI2CLTC2944.LTC2944_set_shutdown(I2C_ADDRESS_LTC2944,LTC2944_SHUTDOWN_MODE_UNDO);//undoshutdown,使芯片工作
objI2CLTC2944.LTC2944_set_mode(I2C_ADDRESS_LTC2944,LTC2944_AUTOMATIC_MODE);//设置为自动模式
reply=objI2CLTC2944.LTC2944_read(I2C_ADDRESS_LTC2944,LTC2944_CONTROL_REG,&data);
Serial.printf("LTC2944 read data= 0x%02X\n", data);
delay(1000);
objI2CLTC2944.LTC2944_set_mode(I2C_ADDRESS_LTC2944,LTC2944_SCAN_MODE);
reply=objI2CLTC2944.LTC2944_read(I2C_ADDRESS_LTC2944,LTC2944_CONTROL_REG,&data);
Serial.printf("LTC2944 read data= 0x%02X\n", data);
delay(1000);
objI2CLTC2944.LTC2944_set_mode(I2C_ADDRESS_LTC2944,LTC2944_MANUAL_MODE);
reply=objI2CLTC2944.LTC2944_read(I2C_ADDRESS_LTC2944,LTC2944_CONTROL_REG,&data);
Serial.printf("LTC2944 read data= 0x%02X\n", data);
delay(1000);
objI2CLTC2944.LTC2944_set_mode(I2C_ADDRESS_LTC2944,LTC2944_SLEEP_MODE);
reply=objI2CLTC2944.LTC2944_read(I2C_ADDRESS_LTC2944,LTC2944_CONTROL_REG,&data);
Serial.printf("LTC2944 read data= 0x%02X\n", data);
delay(1000);
objI2CLTC2944.LTC2944_set_mode(I2C_ADDRESS_LTC2944,LTC2944_AUTOMATIC_MODE);
reply=objI2CLTC2944.LTC2944_read(I2C_ADDRESS_LTC2944,LTC2944_CONTROL_REG,&data);
Serial.printf("LTC2944 read data= 0x%02X\n", data);
delay(1000);
objI2CLTC2944.LTC2944_set_mode(I2C_ADDRESS_LTC2944,LTC2944_AUTOMATIC_MODE);
reply=objI2CLTC2944.LTC2944_read(I2C_ADDRESS_LTC2944,LTC2944_CONTROL_REG,&data);
Serial.printf("LTC2944 read data= 0x%02X\n", data);
delay(1000);
//objI2CLTC2944.LTC2944_set_ACR_full(I2C_ADDRESS_LTC2944);电池充满状态下认为设置ACR为0xFFFF,便于实际计算电池电量
}
void loop() {
byte error, address;
int nDevices = 0;
uint8_t data;
uint16_t data16;
float voltage;
float current;
int8_t reply;
objI2CLTC2944.LTC2944_read_16_bits(I2C_ADDRESS_LTC2944,LTC2944_VOLTAGE_MSB_REG,&data16);
Serial.printf("LTC2944 read data= 0x%04X\n", data16);
voltage=objI2CLTC2944.LTC2944_code_to_voltage(data16);
Serial.print("read voltage=");Serial.println(voltage);
delay(1000);
objI2CLTC2944.LTC2944_read_16_bits(I2C_ADDRESS_LTC2944,LTC2944_CURRENT_MSB_REG,&data16);
Serial.printf("LTC2944 read data= 0x%04X\n", data16);
current=objI2CLTC2944.LTC2944_code_to_current(data16,resistor)*1000;
Serial.print("read current=");Serial.print(current);Serial.println("mA");
delay(1000);
/*
//扫描I2C总线看芯片在总线上不
Serial.println("Scanning for I2C devices ...");
for(address = 0x01; address < 0x7f; address++){
Wire1.beginTransmission(address);
error = Wire1.endTransmission();
if (error == 0){
Serial.printf("I2C device found at address 0x%02X\n", address);
nDevices++;
} else if(error != 2){
Serial.printf("Error %d at address 0x%02X\n", error, address);
}
}
if (nDevices == 0){
Serial.println("No I2C devices found");
}
*/
}
下载后CPU从串口持续输出电流和电压测量值。
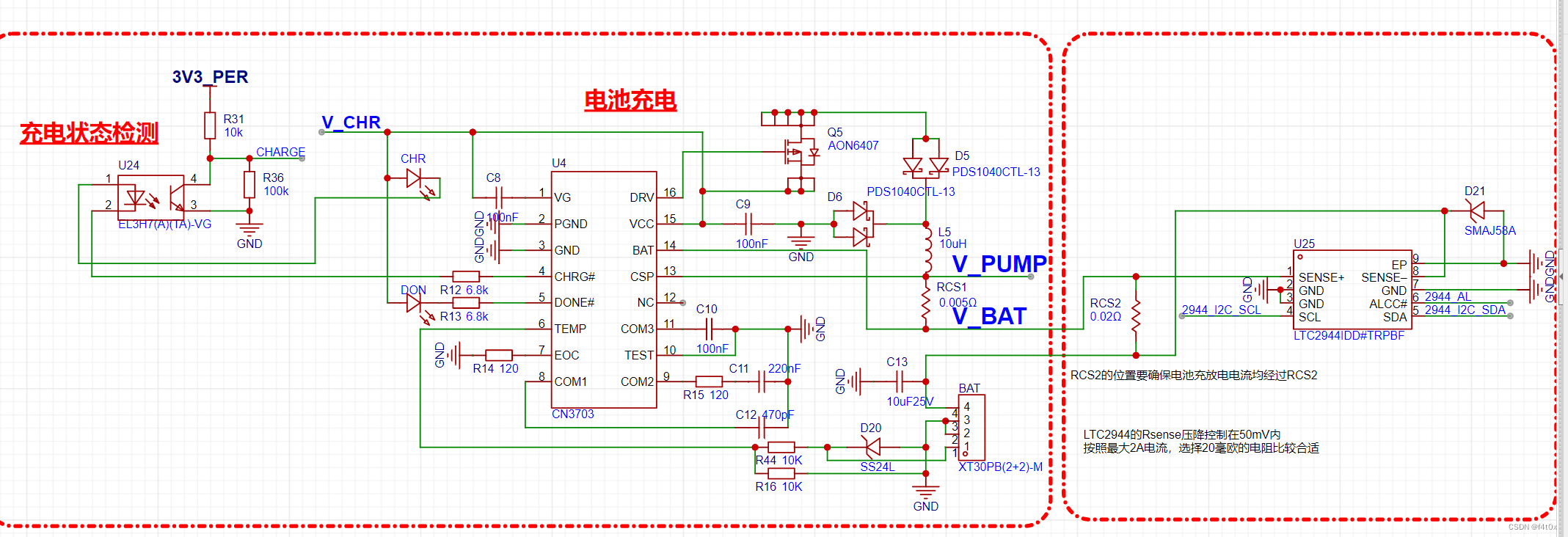
3.电路部分
LTC2944的电路比较简单,把充电部分的电路也一并贴上。左边是充电模块,右边是LTC2944
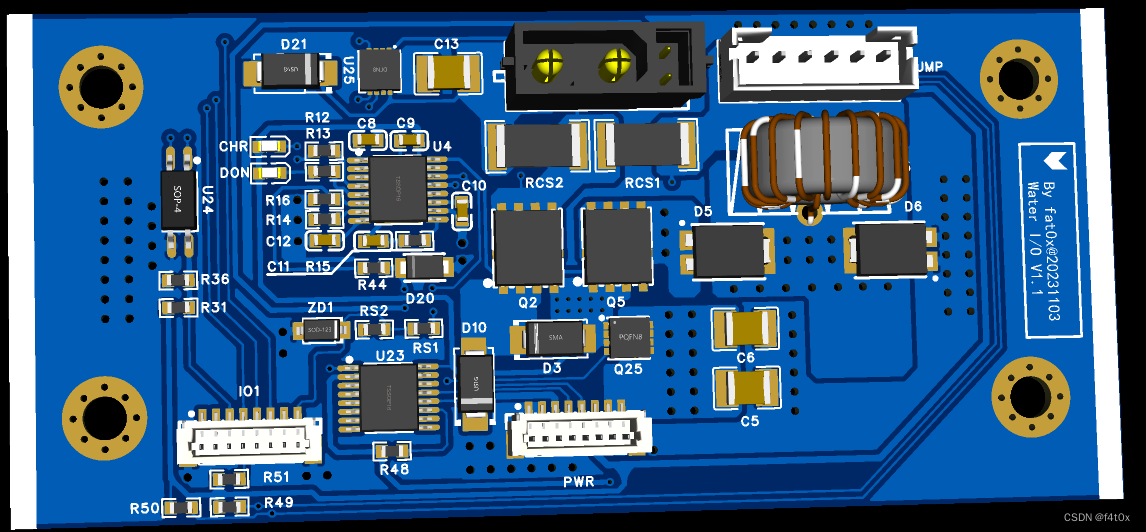
PCB效果图,C13左边就是LTC2944
四、补充的东西
1.电量容量百分比的计算
这个芯片是与有些电量计芯片相比,是不内置电池模型的,因此它并不知道你电池的实际容量,只是简单的对电量进行加减计数。所以要得出电池容量百分比,需要你根据使用情况自己建立电池模型,比如在电池充满的情况下把ACR置0xFFFF,然后待电池放空时读出ACR的值,用0xFFFF减去ACR读出值来计算出你电池的实际容量。然后在后面的应用过程中就可以根据当时ACR的读出值除以电池容量来计算当前电量百分比。
然而,电池容量会随着电池寿命、环境等因素改变的,所以你也需要根据这些情况来不断修正电池总容量,以便得出更准确的百分比。
2.ACR值的保存
LTC2944并不内置flash,ACR的值在芯片通电情况下才能得以保存。因此如果芯片断电(如电池没电了),再恢复供电的情况下,ACR会复位为0x7FFF,并重新计数。所以电池模型的建立需要你自己再额外找断电不丢数据的地方(比如ESP32的flash)来保存电池容量等关键数据。



![[设计模式Java实现附plantuml源码~创建型] 多态工厂的实现——工厂方法模式](https://img-blog.csdnimg.cn/direct/3660745c7cb246d4bdb9a90dcfe23665.png)
![[学习笔记]刘知远团队大模型技术与交叉应用L4-Prompt-learning Delta-learning](https://img-blog.csdnimg.cn/direct/8bf42d97867c4bad9d98d9d38293c26a.png)