一、前言
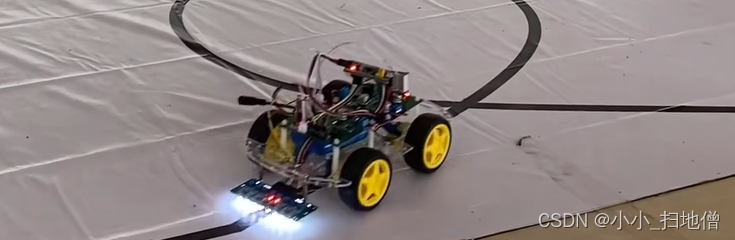
本文旨在分享我学习STM32的过程中,为了强化学习成果,试着制作一些实训项目。最开始做的就是STM32蓝牙小车、STM32红外循迹小车、STM32超声波避障小车。
相信看完本文的你,一定可以亲手制作一辆属于自己的智能小车!
注:文末附源码工程,需要的读者可以至文末下载
如果你还想进阶的话,可以尝试制作基于PID算法的两轮平衡小车——这是它的相关源码工程。STM32两轮平衡小车原理详解(开源)_stm32平衡车原理-CSDN博客
二、实训项目
(一)、项目概述

1、共同需要的驱动模块
关于以上三种功能的智能小车,都需要用到一些共同的驱动模块,这里我先把他们共同用到的模块罗列出来。
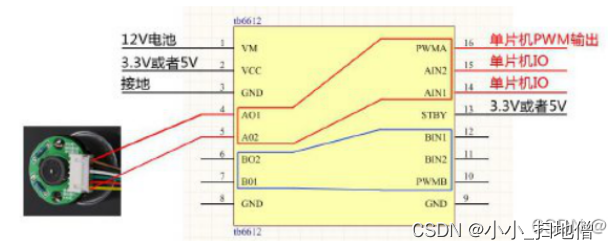
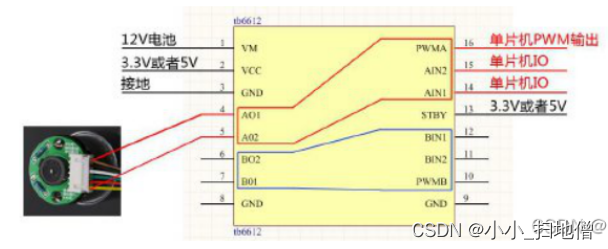
A、模块一:TB6612电机驱动模块
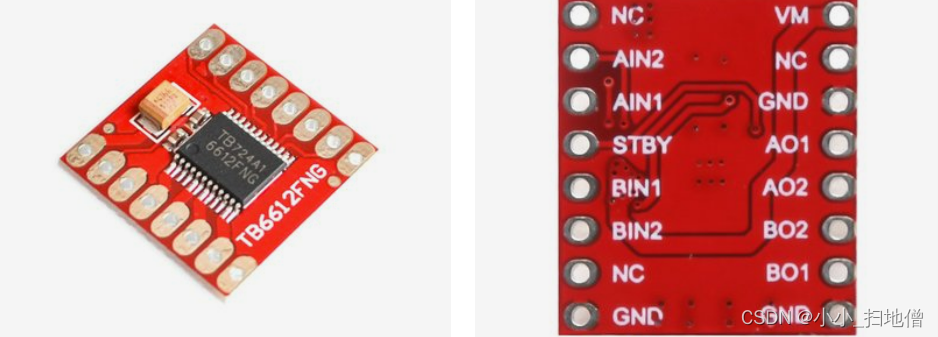
关于该模块的使用方式,请看以下文章:
B、模块二:两轮或四轮车模
为了满足大家的需求,我会在讲解电机驱动时分别讲两种电机:
(1)一种时大家看到的下图的直流电机
(2)另一种是大家熟悉的编码电机



C、模块三:电源

D、模块四:电源稳压模块(降压模块)

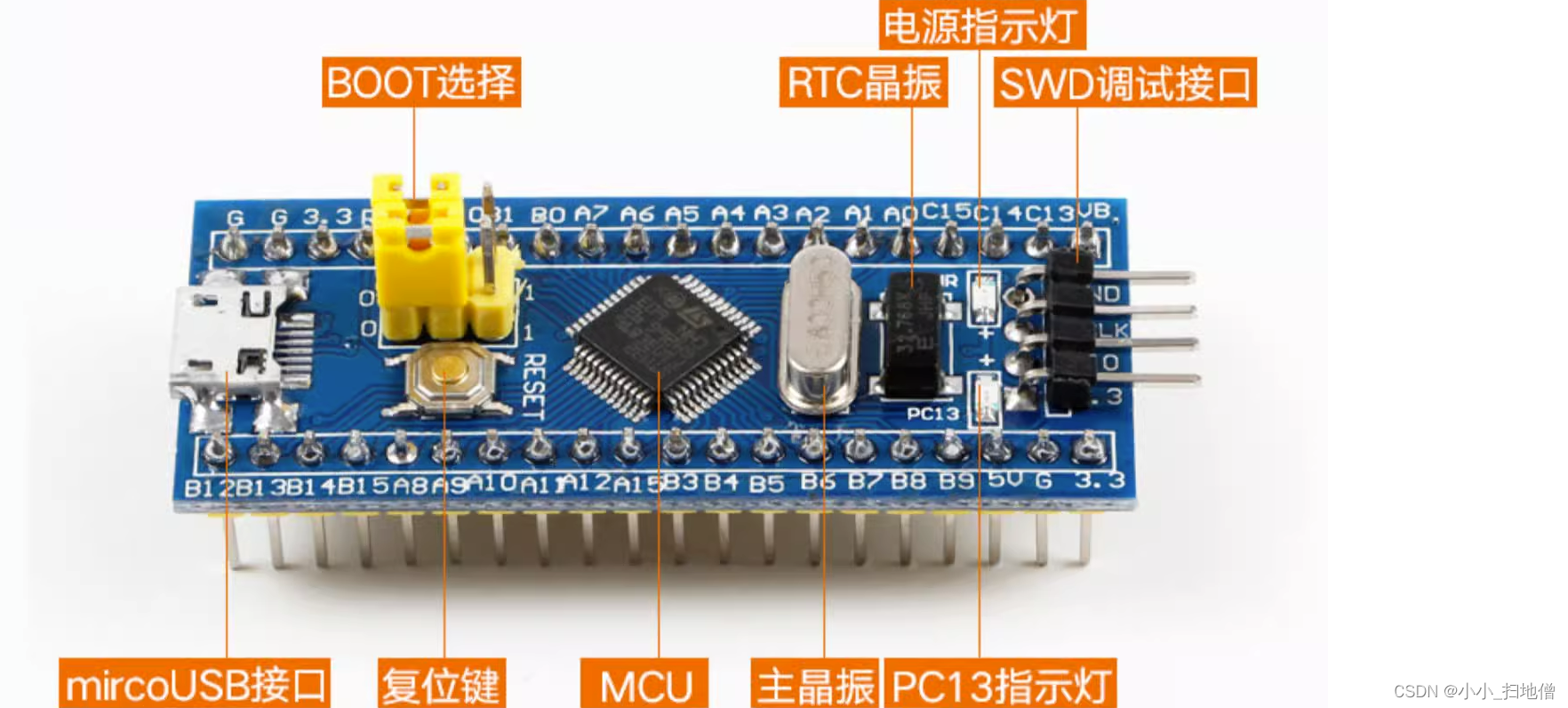
E、模块四:stm32f103c8t6最小系统板
2、共同的驱动代码
为什么我这里要先讲述以上三个功能的共同驱动代码呢?因为以上三个功能都是基于同一个功能下实现的,这个功能就是——
首先车必须能动!!!
那么车动的驱动代码是如何实现的呢?不了解TB6612电机驱动模块的小伙伴建议先去了解一下该模块的使用的方法!
这里先讲一下直流电机的驱动:
(1)直流电机
单片机驱动引脚配置:
void CarGo(void)
{
TIM_SetCompare4(TIM1 , 170);
TIM_SetCompare1(TIM1 , 170);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
PWM配置:
#include "PWM1.h" // Device header
void PWM1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM1);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 1000 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC4Init(TIM1, &TIM_OCInitStructure);
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
}
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
//TIM1_PWM_Init(7199,0);//PWM频率=72000/(7199+1)=10Khz
//void TIM1_PWM_Init(u16 arr,u16 psc)
//{
// GPIO_InitTypeDef GPIO_InitStructure;
// TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// TIM_OCInitTypeDef TIM_OCInitStructure;
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
// //设置该引脚为复用输出功能,输出TIM1 CH1 CH4的PWM脉冲波形
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11; //TIM_CH1 //TIM_CH4
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
//
// TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
// TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
// TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
// TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
// TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//
// TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
// TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
// TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
// TIM_OCInitStructure.TIM_Pulse = arr >> 1;
// TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
// TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
// TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
// TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
// TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能
// TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH4预装载使能
//
// TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
//
// TIM_Cmd(TIM1, ENABLE); //使能TIM1
//}
#ifndef __PWM1_H
#define __PWM1_H
#include "sys.h"
#include "stm32f10x_tim.h"
void TIM1_PWM_Init(u16 arr,u16 psc);
#endif
直流电机驱动:
#include "stm32f10x.h" // Device header
#include "PWM1.h"
#include "motor.h"
/*
一个端口接PWM,还有一个接高低电平,无论接哪个电平输出的PWM波形不变,若PWM输出30
IO接负:PWM的上半段输出电压,则给电机30的电压,正转
IO接正;PWM的上半段输出电压,则给电机70的电压,负转
*/
void CarGo(void)
{
TIM_SetCompare4(TIM1 , 170);
TIM_SetCompare1(TIM1 , 170);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarStop(void)
{
TIM_SetCompare4(TIM1 , 0);
TIM_SetCompare1(TIM1 , 0);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_12);
GPIO_SetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarLeft(void)
{
TIM_SetCompare4(TIM1 , 100);
TIM_SetCompare1(TIM1 , 200);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarBigLeft(void)
{
TIM_SetCompare4(TIM1 , 100);
TIM_SetCompare1(TIM1 , 250);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarLeftAround(void)
{
TIM_SetCompare4(TIM1 , 0);
TIM_SetCompare1(TIM1 , 0);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarRight(void)
{
TIM_SetCompare4(TIM1 , 200);
TIM_SetCompare1(TIM1 , 100);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarBigRight(void)
{
TIM_SetCompare4(TIM1 , 250);
TIM_SetCompare1(TIM1 , 100);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarRightAround(void)
{
TIM_SetCompare4(TIM1 , 400);
TIM_SetCompare1(TIM1 , 400);
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_1); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void CarBack(void)
{
TIM_SetCompare4(TIM1 , 100);
TIM_SetCompare1(TIM1 , 100);
GPIO_ResetBits(GPIOB,GPIO_Pin_13); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_12);
GPIO_SetBits(GPIOB,GPIO_Pin_1); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
}
void GPIO_init_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能GPIO的外设时钟
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_13|GPIO_Pin_12|GPIO_Pin_1|GPIO_Pin_0;//选择要用的GPIO引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置引脚模式为推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设置引脚速度为50MHZ
GPIO_Init(GPIOB,&GPIO_InitStructure);//调用库函数,初始化GPIO
}
/*-------------------
函数功能:
提供电机PWM接口函数,将PID计算好的PWM直接赋值给电机
--------------------*/
void ZhengZhuan()
{
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制右边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_SetBits(GPIOB,GPIO_Pin_1); //控制左边轮胎
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
}
void FanZhuan()
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_13);
GPIO_ResetBits(GPIOB,GPIO_Pin_0); //控制左边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_1);
}
void Stop()
{
GPIO_SetBits(GPIOB,GPIO_Pin_13); //控制右边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_12);
GPIO_SetBits(GPIOB,GPIO_Pin_1); //控制左边轮胎
GPIO_SetBits(GPIOB,GPIO_Pin_0);
}
void motor_pwm(float duty) //0 -- 7200
{
if(duty>=0 && duty <= 5000 )
{
ZhengZhuan();//====电机正转,逆时针
TIM_SetCompare1(TIM1, duty);
TIM_SetCompare4(TIM1, duty);
}
else if(duty > 5000)
{
Stop();
}
else
{
FanZhuan();
TIM_SetCompare2(TIM1, duty);
TIM_SetCompare1(TIM1, duty);
}
}
(2)、编码电机
编码电机实质和直流电机一样,只不过其本身自带一个编码测速盘,所以我在这里详细讲述一下编码器的使用方式。
Encoder.c
#include "stm32f10x.h" // Device header
#include "Encoder.h"
#include "sys.h"
//电机编码器线数大约位263
void Encoder2_Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能定时器4的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;
TIM_ICInit(TIM4, &TIM_ICInitStructure);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM4,0);
TIM_Cmd(TIM4, ENABLE);
}
void Encoder1_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
//开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//输入比较用的TIM2,所以输入捕获用TIM3,不能用一个,TIM3也在APB1
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//配置GPIO
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //TIM3的通道一的引脚在PA6上
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR,设大,防止溢出
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICStructInit(&TIM_ICInitStructure); //给默认的初始值
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道一
TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波大小
TIM_ICInit(TIM3, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //通道一
TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波大小
TIM_ICInit(TIM3, &TIM_ICInitStructure);
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);
//配置编码器接口
TIM_Cmd(TIM3,ENABLE);
}
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 4:
Encoder_TIM= (short)TIM4 -> CNT;
TIM4 -> CNT=0;
break;
case 3:
Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0;
break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#define ENCODER_TIM_PERIOD (u16)(65535) //103的定时器是16位 2的16次方最大是65536
//uint16_t Encoder1_get(void);
void Encoder1_Init(void);
void Encoder2_Init(void);
int Read_Encoder(u8 TIMX);
#endif
提示:编码电机的驱动和直流电机一样,所以不再赘述。
(二)、实训项目——蓝牙小车
Step1:器材准备
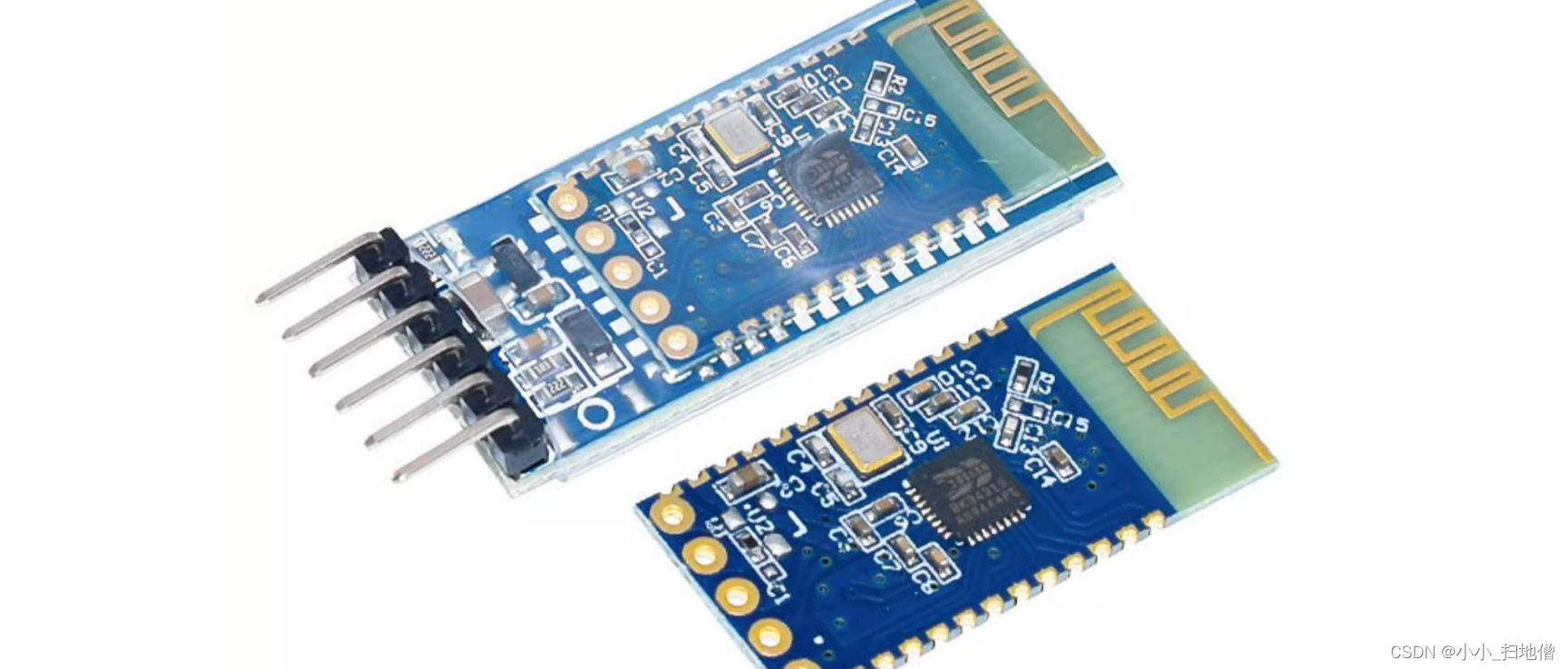
在以上共同的器材上添加一个蓝牙模块
Step2:核心代码分析
设计蓝牙小车,由于蓝牙是串口通信,所以关键就是如何配置串口,保证数据收发正常。
对于单片机的串口配置,请详细看下面的代码:
Usart.c
#include "sys.h"
#include "usart1.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32开发板
//串口1初始化
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2012/8/18
//版本:V1.5
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//********************************************************************************
//V1.3修改说明
//支持适应不同频率下的串口波特率设置.
//加入了对printf的支持
//增加了串口接收命令功能.
//修正了printf第一个字符丢失的bug
//V1.4修改说明
//1,修改串口初始化IO的bug
//2,修改了USART_RX_STA,使得串口最大接收字节数为2的14次方
//3,增加了USART_REC_LEN,用于定义串口最大允许接收的字节数(不大于2的14次方)
//4,修改了EN_USART1_RX的使能方式
//V1.5修改说明
//1,增加了对UCOSII的支持
//
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void uart1_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
Usart.h
#ifndef __USART1_H
#define __USART1_H
#include "stdio.h"
#include "sys.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK STM32开发板
//串口1初始化
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2012/8/18
//版本:V1.5
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//********************************************************************************
//V1.3修改说明
//支持适应不同频率下的串口波特率设置.
//加入了对printf的支持
//增加了串口接收命令功能.
//修正了printf第一个字符丢失的bug
//V1.4修改说明
//1,修改串口初始化IO的bug
//2,修改了USART_RX_STA,使得串口最大接收字节数为2的14次方
//3,增加了USART_REC_LEN,用于定义串口最大允许接收的字节数(不大于2的14次方)
//4,修改了EN_USART1_RX的使能方式
//V1.5修改说明
//1,增加了对UCOSII的支持
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
//#define EN_USART2_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart1_init(u32 bound);
//void uart_init2(u32 bound);
#endif
(三)、实训项目——超声波避障小车

超声波避障,关键就是如何驱动超声波模块,以达到测距避障功能
超声波驱动核心代码
这里需要注意一个问题就是,超声波测距应该放在中断里实现!!!!
CS.c
#include "cs.h" #include "stm32f10x.h" #include "delay.h" #include "usart.h" /*记录定时器溢出次数*/ uint overcount=0; /*设置中断优先级*/ void NVIC_Config(void) { NVIC_InitTypeDef NVIC_InitStructer; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitStructer.NVIC_IRQChannelPreemptionPriority=0; NVIC_InitStructer.NVIC_IRQChannelSubPriority=0; NVIC_InitStructer.NVIC_IRQChannel=TIM4_IRQn; NVIC_InitStructer.NVIC_IRQChannelCmd=ENABLE; NVIC_Init(&NVIC_InitStructer); } /*初始化模块的GPIO以及初始化定时器TIM2*/ void CH_SR04_Init(void) { GPIO_InitTypeDef GPIO_InitStructer; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructer; RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); /*TRIG触发信号*/ GPIO_InitStructer.GPIO_Speed=GPIO_Speed_50MHz; //原来接PB 8、PB 9不能用,后改为PA 11,PA 12就能用 GPIO_InitStructer.GPIO_Mode=GPIO_Mode_Out_PP; GPIO_InitStructer.GPIO_Pin=GPIO_Pin_11; GPIO_Init(GPIOA, &GPIO_InitStructer); /*ECHO回响信号*/ GPIO_InitStructer.GPIO_Mode=GPIO_Mode_IN_FLOATING; GPIO_InitStructer.GPIO_Pin=GPIO_Pin_12; GPIO_Init(GPIOA, & GPIO_InitStructer); GPIO_ResetBits(GPIOA,GPIO_Pin_4); /*定时器TIM2初始化*/ TIM_DeInit(TIM4); TIM_TimeBaseInitStructer.TIM_Period=999;//定时周期为1000 TIM_TimeBaseInitStructer.TIM_Prescaler=71; //分频系数72 TIM_TimeBaseInitStructer.TIM_ClockDivision=TIM_CKD_DIV1;//不分频 TIM_TimeBaseInitStructer.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructer); TIM_ClearFlag(TIM4,TIM_FLAG_Update); TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);//开启更新中断 NVIC_Config(); TIM_Cmd(TIM4,DISABLE);//关闭定时器使能 } float Senor_Using(void) //测距函数 { float length=0,sum=0; u16 tim; uint i=0; /*测5次数据计算一次平均值*/ while(i!=5) { PAout(11)=1; //拉高信号,作为触发信号 delay_us(20); //高电平信号超过10us PAout(11)=0; /*等待回响信号*/ while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_12)==RESET); TIM_Cmd(TIM4,ENABLE);//回响信号到来,开启定时器计数 i+=1; //每收到一次回响信号+1,收到5次就计算均值 while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_12)==SET);//回响信号消失 TIM_Cmd(TIM4,DISABLE);//关闭定时器 tim=TIM_GetCounter(TIM4);//获取计TIM4数寄存器中的计数值,一边计算回响信号时间 length=(tim+overcount*1000)/58.0;//通过回响信号计算距离 sum=length+sum; TIM4->CNT=0; //将TIM4计数寄存器的计数值清零 overcount=0; //中断溢出次数清零 delay_ms(10); } length=sum/5; return length;//距离作为函数返回值 } void TIM4_IRQHandler(void) //中断,当回响信号很长是,计数值溢出后重复计数,用中断来保存溢出次数 { if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET) { TIM_ClearITPendingBit(TIM4,TIM_IT_Update);//清除中断标志 overcount++; } }Cs.h
#ifndef __CS_H #define __CS_H #include "stm32f10x.h" #include "delay.h" #include "sys.h" #define uint unsigned int #define TRIG_Send PBout(8) #define ECHO_Reci PBin(9) void CH_SR04_Init(void); //超声波模块相关配置初始化 float Senor_Using(void); //测距函数,返回值即为距离 void NVIC_Config(void); //中断配置 #endif通过以上驱动代码,就能实现超声波测距了。
(四)、实训项目——红外循迹
红外循迹相对简单,只需明白红外传感器在检测到黑色物质时和未检测到黑色物质时,传感器信号口传回的电平是不同的。通过单片机端口来判断传回的高低电平,不同位置的传感器传回的信号不同,从而可以根据不同位置传回的高低电平来控制车的运动。
定义几个单片机检测端口来判断红外 传感器传回的电平信号即可。
#include "xunji.h"
void xunji_config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); // 使能PB端口时钟
//配置电机引脚,不知道什么原因要在这里配置成上拉才能实现pwm调速
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7|GPIO_Pin_14|GPIO_Pin_15; //选择对应的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//配置GPIO模式,输入上拉
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB端口
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE); // 使能PA端口时钟
//配置红外引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4| GPIO_Pin_5;; //选择对应的引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//配置GPIO模式,浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PC端口
}
//读取红外的信号
void Read_xunji_Date(void)
{
L1;
L2;
M;
R2;
R1;
}
#ifndef __XUNJI_H
#define __XUNJI_H
#include "stm32f10x.h"
#define L1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1)
#define L2 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2)
#define M GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_3)
#define R2 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4)
#define R1 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_5) // L1 L2 M R2 R1
void xunji_config(void);
void Read_xunji_Date(void); //读循迹模块返回的值
#endif
三、总结
以上就是STM32红外循迹、蓝牙、超声波避障智能小车的所有关键代码和注意事项的详细分享。希望我的分享对你有所帮助。
最后,我将完整的代码工程分享给大家,白嫖的时候可不能忘了点赞,你的点赞,是我保持分享欲的无尽动力!!!加油,冲冲冲……
1、https://download.csdn.net/download/m0_73931287/88726542
2、https://download.csdn.net/download/m0_73931287/88726547?spm=1001.2014.3001.5503
如果以上资源不能下载,请读者下方留言或者私信我,收到后我会第一时间回复。








![[Docker] Docker为什么出现](https://img-blog.csdnimg.cn/direct/eb8c99a6ce3049ea8d0d7a26c5f8ed28.png)