【STM32】HAL库的STOP低功耗模式UART串口唤醒,第一个接收字节出错的问题(已解决)
文章目录
- BUG复现
- 调试代码
- 推测原因及改进方案尝试
- 中断
- 时钟
- 供电
- 外设
- 唤醒方式
- 校验码
- 硬件问题
- 切换到STOP0模式尝试
- 结论和猜想
- 解决方案
- 附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
- SysTick系统定时器精准延时
- 延时函数
- 阻塞延时
- 非阻塞延时
- 位带操作
- 位带代码
- 位带宏定义
- 总线函数
- 一、位带操作理论及实践
- 二、如何判断MCU的外设是否支持位带
BUG复现
最近做项目时 用到了STOP1停止模式的串口唤醒 唤醒配置如下:
【STM32】HAL库低功耗STOP停止模式的串口唤醒(解决进入以后立马唤醒、串口唤醒和回调无法一起使用、接收数据不全的问题)
我配置的是串口波特率115200 1停止位 Even偶校验
发现偶然会出现唤醒以后第一个字节接收有问题的情况
- 进入STOP1模式
- 配置串口唤醒
- 使用jlink复位以后断电并重新上电
- 每次进入停止模式2s后发送串口唤醒 就能复现该BUG 并且稳定出现
而在每次烧录代码并用jlink复位后 完全不会出现此BUG的情况
调试代码
经过调试发现 :
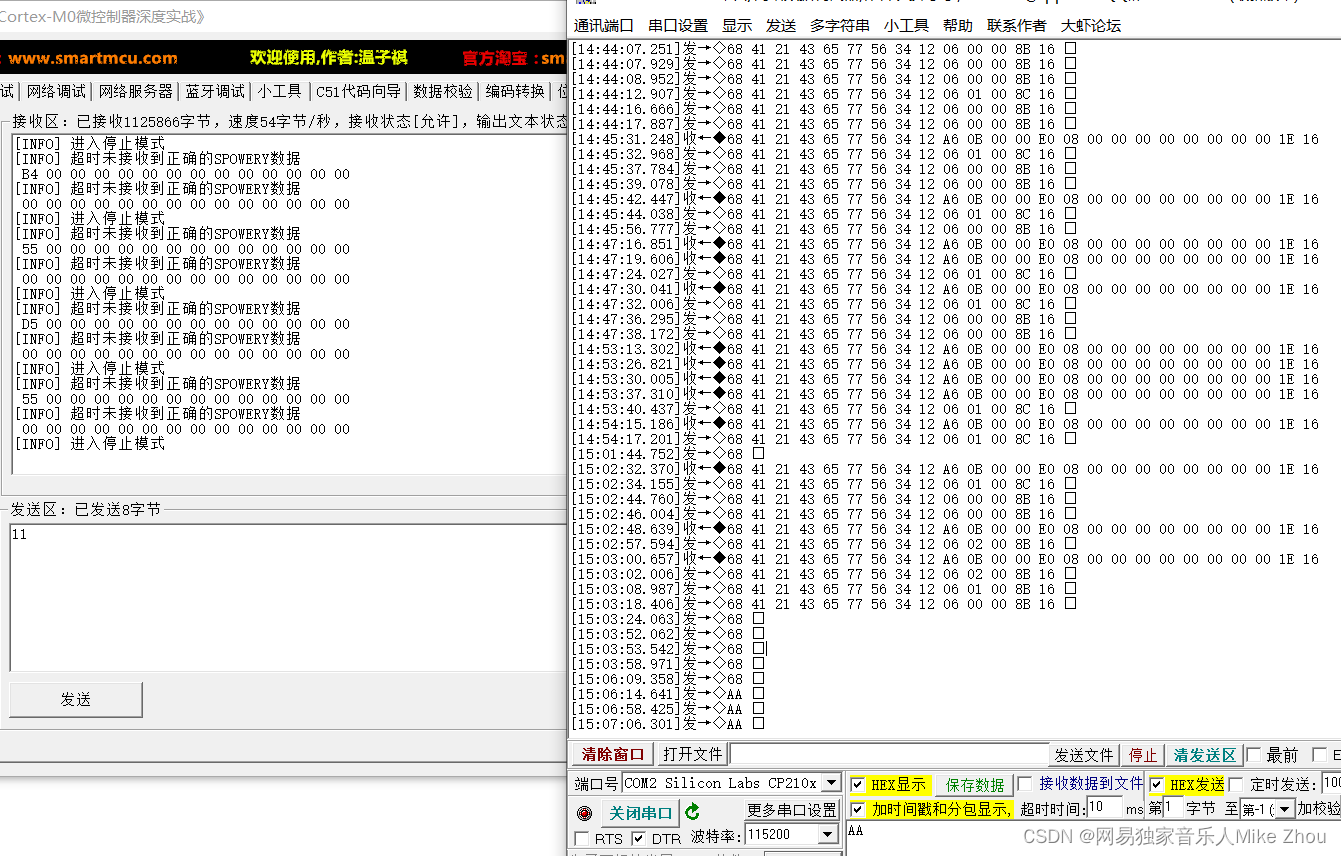
第一个字节发68 实际接收的是B4
第一个字节发AA 实际接收是55

那么就可以看到 实际上是串口接收回调在进行接收采样时 往后移了一位 所以数据错了
推测原因及改进方案尝试
中断
串口接收中断是发生在唤醒中断之前的
后移一位数据可能是唤醒中断导致 所以我关了中断
将以下注释:
//__HAL_UART_ENABLE_IT(huart,UART_IT_WUF); //开启唤醒中断
无法解决
时钟
配置串口唤醒需要保留HSI 唤醒后重新对整体时钟进行初始化
将唤醒后的时钟配置注释 无法解决
//SystemClock_Config();
供电
由于jlink烧录后没问题 再次上电复位就有问题 所以推测是供电不稳定导致
【STM32】HAL库的RCC复位状态判断及NVIC系统软件复位
在初始化前加了个判断复位的函数 并使用软件复位一次
if (__HAL_RCC_GET_FLAG(RCC_FLAG_BORRST) != RESET)
{
__HAL_RCC_CLEAR_RESET_FLAGS();
printf("[INFO] 设备冷启动 0.5s后软件复位\n");
delay_ms(500);
HAL_NVIC_SystemReset();
}
无法解决
外设
由于唤醒前会DeInit其他外设 唤醒后重新初始化 推测是不是GPIO或者其他外设初始化导致
注释掉相关函数
无法解决
唤醒方式
串口唤醒有三种 分别是接收到帧 接收到数据 接收到起始位
用这三种都不行
校验码
改成无校验码 无法解决
硬件问题
更换了其他板子和串口模块 无法解决
切换到STOP0模式尝试
STOP0最初效果比STOP1好很多 重新上电复位等待2s也能唤醒 并且第一个数据不出错
但是一直低功耗很长时间以后 再次唤醒则又会出错
并且 当我配置为起始位唤醒时 隔了一段时间以后 串口虽然可以唤醒 但接收的那一条数据全为0
改回接收到帧唤醒后 与STOP1的BUG相同
结论和猜想
进入低功耗需要时间 同样 唤醒也需要时间 所以可能就是这么点时间导致CPU延迟采样 所以串口接收不准
同样 在进入低功耗后 可以看到电流也是缓慢下降的 而采用jlink烧录后 实际上功耗下不来(大个1ma左右) 推测应该是jlink的信号复位保持了某些寄存器不清零(毕竟jlink和复位也算中断的一种)
如果想彻底解决 可以做此尝试:
- 串口发送时预留一位或多位
- 降低串口波特率
- 改用sleep模式或其他方案(sleep模式唤醒无延迟)
解决方案
增加一个函数HAL_UARTEx_EnableClockStopMode即可
具体参考下文:
【STM32】HAL库的STOP低功耗模式UART串口唤醒,解决首字节出错的问题(全网第一解决方案)
附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
SysTick系统定时器精准延时
延时函数
SysTick->LOAD中的值为计数值
计算方法为工作频率值/分频值
比如工作频率/1000 则周期为1ms
以ADuCM4050为例:
#include "ADuCM4050.h"
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 26000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器
while(ms--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 26000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器
while(us--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
其中的52000000表示芯片的系统定时器频率 32系列一般为外部定时器频率的两倍
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while(ms--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while(us--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
非阻塞延时
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
位带操作
位带代码
M3、M4架构的单片机 其输出口地址为端口地址+20 输入为+16
M0架构的单片机 其输出口地址为端口地址+12 输入为+8
以ADuCM4050为列:
位带宏定义
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010
#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050
#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090
#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0
#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) //输出
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) //输入
#define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) //输出
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) //输入
#define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) //输出
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) //输入
#define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) //输出
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) //输入
#define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)
#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)
void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);
void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);
void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);
void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);
void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);
#endif
总线函数
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"
void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{
switch(port)
{
case 0:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 1:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 2:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 3:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
default:port=0;break;
}
}
void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num最大为0xffff
{
int i;
for(i=0;i<16;i++)
{
GPIO_OUT(port,i,(num>>i)&0x0001);
}
}
void P0_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P0_O(i)=(num>>i)&0x0001;
}
}
unsigned int P0_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P0_I(i)<<i)&0xFFFF;
}
return num;
}
void P1_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P1_O(i)=(num>>i)&0x0001;
}
}
unsigned int P1_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P1_I(i)<<i)&0xFFFF;
}
return num;
}
void P2_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P2_O(i)=(num>>i)&0x0001;
}
}
unsigned int P2_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P2_I(i)<<i)&0xFFFF;
}
return num;
}
void P3_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P3_O(i)=(num>>i)&0x0001;
}
}
unsigned int P3_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P3_I(i)<<i)&0xFFFF;
}
return num;
}
一、位带操作理论及实践
位带操作的概念其实30年前就有了,那还是 CM3 将此能力进化,这里的位带操作是 8051 位寻址区的威力大幅加强版
位带区: 支持位带操作的地址区
位带别名: 对别名地址的访问最终作 用到位带区的访问上(注意:这中途有一个 地址映射过程)
位带操作对于硬件 I/O 密集型的底层程序最有用处
支持了位带操作后,可以使用普通的加载/存储指令来对单一的比特进行读写。在CM4中,有两个区中实现了位带。其中一个是SRAM区的最低1MB范围,第二个则是片内外设区的最低1MB范围。这两个区中的地址除了可以像普通的RAM一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个32位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。
位操作就是可以单独的对一个比特位读和写,类似与51中sbit定义的变量,stm32中通过访问位带别名区来实现位操作的功能
STM32中有两个地方实现了位带,一个是SRAM,一个是片上外设。
(1)位带本质上是一块地址区(例如每一位地址位对应一个寄存器)映射到另一片地址区(实现每一位地址位对应一个寄存器中的一位),该区域就叫做位带别名区,将每一位膨胀成一个32位的字。
(2)位带区的4个字节对应实际寄存器或内存区的一个位,虽然变大到4个字节,但实际上只有最低位有效(代表0或1)
只有位带可以直接用=赋值的方式来操作寄存器 位带是把寄存器上的每一位 膨胀到32位 映射到位带区 比如0x4002 0000地址的第0个bit 映射到位带区的0地址 那么其对应的位带映射地址为0x00 - 0x04 一共32位 但只有LSB有效 采用位带的方式用=赋值时 就是把位带区对应的LSB赋值 然后MCU再转到寄存器对应的位里面 寄存器操作时 如果不改变其他位上面的值 那就只能通过&=或者|=的方式进行
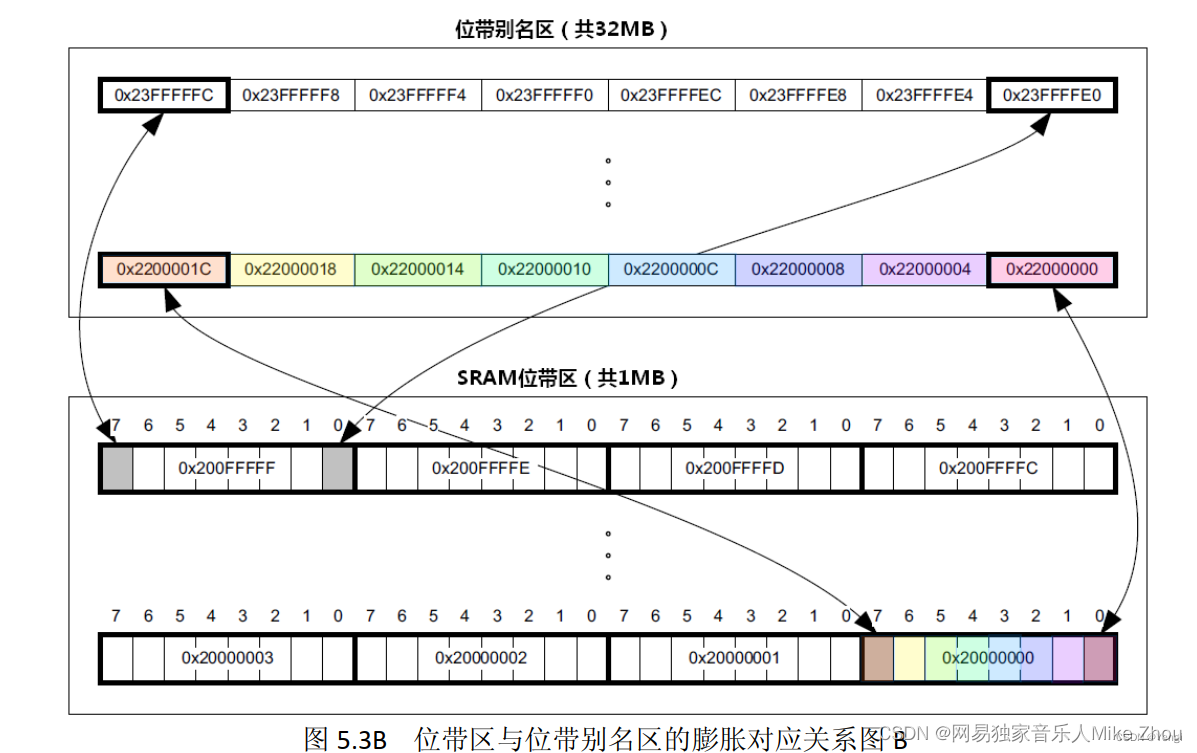
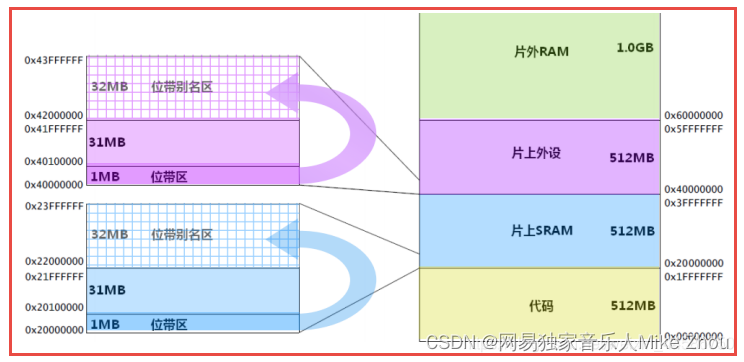
要设置0x2000 0000这个字节的第二个位bit2为1,使用位带操作的步骤有:
1、将1写入位 带别名区对应的映射地址(即0x22000008,因为1bit对应4个byte);
2、将0x2000 0000的值 读取到内部的缓冲区(这一步骤是内核完成的,属于原子操作,不需要用户操作);
3、将bit2置1,再把值写 回到0x2000 0000(属于原子操作,不需要用户操作)。
关于GPIO引脚对应的访问地址,可以参考以下公式
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
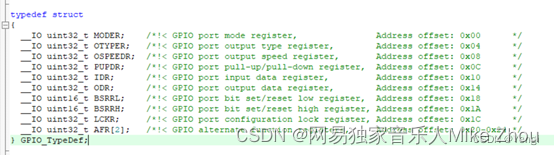
如:端口F访问的起始地址GPIOF_BASE
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)
但好在官方库里面都帮我们定义好了 只需要在BASE地址加上便宜即可
例如:
GPIOF的ODR寄存器的地址 = GPIOF_BASE + 0x14
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
设置PF9引脚的话:
uint32_t *PF9_BitBand =
*(uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR– 0x40000000) *32 + 9*4)
封装一下:
#define PFout(x) *(volatile uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR – 0x40000000) *32 + x*4)
现在 可以把通用部分封装成一个小定义:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
那么 设置PF引脚的函数可以定义:
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
若使PF9输入输出则:
PF_O(9)=1; //输出高电平
uint8_t dat = PF_I(9); //获取PF9引脚的值
总线输入输出:
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PF_O(i)=(num>>i)&0x0001;
}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PF_I(i)<<i)&0xFFFF;
}
return num;
}
STM32的可用下面的函数:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "stm32l496xx.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
#define PA_O(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PA_I(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PB_O(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PB_I(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PC_O(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PC_I(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PD_O(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PD_I(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PE_O(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PE_I(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PG_O(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PG_I(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PH_O(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PH_I(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PI_O(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PI_I(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
void PA_BUS_O(unsigned int num);
unsigned int PA_BUS_I(void);
void PB_BUS_O(unsigned int num);
unsigned int PB_BUS_I(void);
void PC_BUS_O(unsigned int num);
unsigned int PC_BUS_I(void);
void PD_BUS_O(unsigned int num);
unsigned int PD_BUS_I(void);
void PE_BUS_O(unsigned int num);
unsigned int PE_BUS_I(void);
void PF_BUS_O(unsigned int num);
unsigned int PF_BUS_I(void);
void PG_BUS_O(unsigned int num);
unsigned int PG_BUS_I(void);
void PH_BUS_O(unsigned int num);
unsigned int PH_BUS_I(void);
void PI_BUS_O(unsigned int num);
unsigned int PI_BUS_I(void);
#endif
#include "GPIO.h"
void PA_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PA_O(i)=(num>>i)&0x0001;
}
}
unsigned int PA_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PA_I(i)<<i)&0xFFFF;
}
return num;
}
void PB_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PB_O(i)=(num>>i)&0x0001;
}
}
unsigned int PB_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PB_I(i)<<i)&0xFFFF;
}
return num;
}
void PC_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PC_O(i)=(num>>i)&0x0001;
}
}
unsigned int PC_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PC_I(i)<<i)&0xFFFF;
}
return num;
}
void PD_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PD_O(i)=(num>>i)&0x0001;
}
}
unsigned int PD_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PD_I(i)<<i)&0xFFFF;
}
return num;
}
void PE_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PE_O(i)=(num>>i)&0x0001;
}
}
unsigned int PE_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PE_I(i)<<i)&0xFFFF;
}
return num;
}
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PF_O(i)=(num>>i)&0x0001;
}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PF_I(i)<<i)&0xFFFF;
}
return num;
}
void PG_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PG_O(i)=(num>>i)&0x0001;
}
}
unsigned int PG_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PG_I(i)<<i)&0xFFFF;
}
return num;
}
void PH_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PH_O(i)=(num>>i)&0x0001;
}
}
unsigned int PH_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PH_I(i)<<i)&0xFFFF;
}
return num;
}
void PI_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PI_O(i)=(num>>i)&0x0001;
}
}
unsigned int PI_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PI_I(i)<<i)&0xFFFF;
}
return num;
}
二、如何判断MCU的外设是否支持位带
根据《ARM Cortex-M3与Cortex-M4权威指南(第3版)》中第6章第7节描述
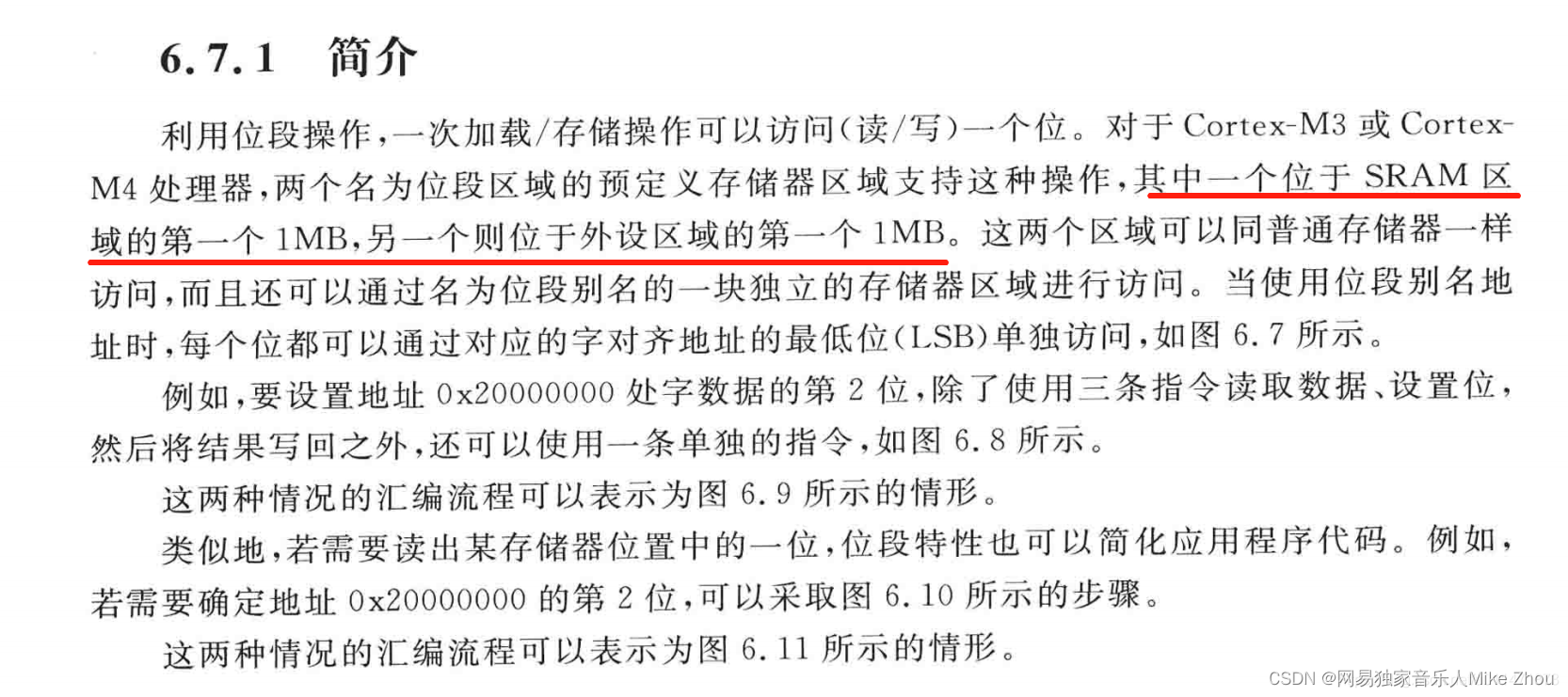
也就是说 要实现对GPIO的位带操作 必须保证GPIO位于外设区域的第一个1MB中
第一个1MB应该是0x4010 0000之前 位带不是直接操作地址 而是操作地址映射 地址映射被操作以后 MCU自动会修改对应寄存器的值
位带区只有1MB 所以只能改0x4000 0000 - 0x400F FFFF的寄存器
像F4系列 GPIO的首地址为0x4002 0000 就可以用位带来更改
STM32L476的GPIO就不行:
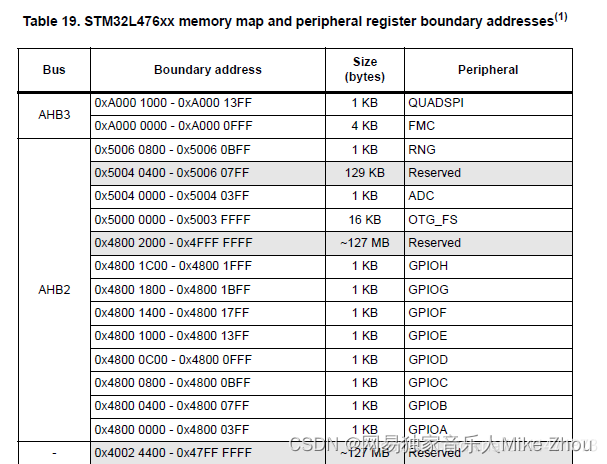
AHB2的都不能用位带
ABP 还有AHB1都可以用
但是L476的寄存器里面 GPIO和ADC都是AHB2