00. 目录
文章目录
- 00. 目录
- 01. 串口简介
- 02. 串口收发HEX数据包接线图
- 03. 串口收发HEX数据包示例1
- 04. 串口收发HEX数据包示例2
- 05. 串口收发文本数据包接线图
- 06. 串口收发文本数据包示例
- 07. 程序示例下载
- 08. 附录
01. 串口简介
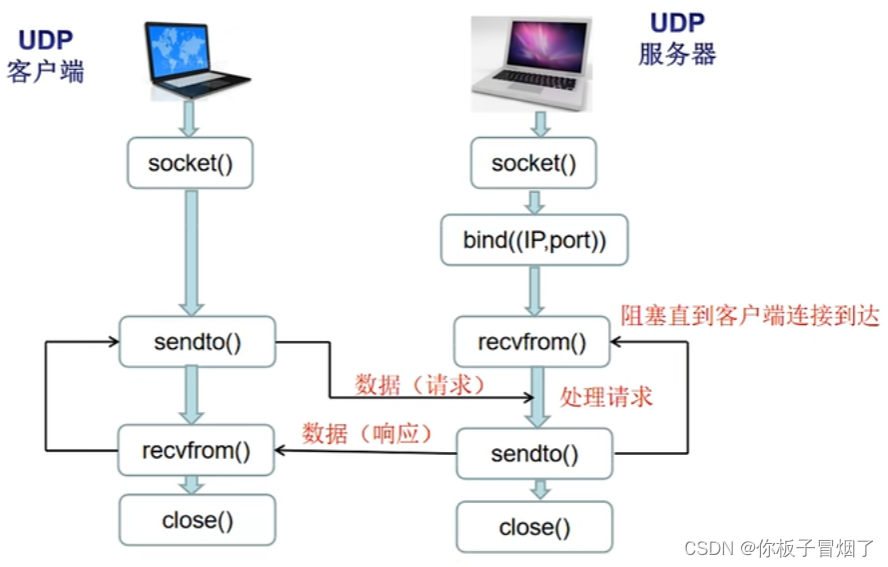
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,因此大部分电子设备都支持该通讯方式, 电子工程师在调试设备时也经常使用该通讯方式输出调试信息。
在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设;STM32标准库则是在寄存器与用户代码之间的软件层。 对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性, 确保原始数据在物理媒体的传输。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。 简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
02. 串口收发HEX数据包接线图

03. 串口收发HEX数据包示例1
uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
extern uint8_t recvPacket[];
void uart_init(void);
void uart_send_byte(uint8_t byte);
void uart_send_array(uint8_t *arr, uint16_t len);
void uart_send_string(char *str);
void uart_send_number(uint32_t num, uint8_t len);
void uart_printf(char *format, ...);
uint8_t uart_getRxFlag(void);
uint8_t uart_getRxData(void);
void uart_send_packet(uint8_t arr[], int len);
#endif /**/
uart.c
#include "uart.h"
#include <stdio.h>
#include <stdarg.h>
uint8_t recvData;
uint8_t recvFlag;
uint8_t recvPacket[32];
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//GPIO初始化 PA10 RX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//设置串口中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//设置中断分组
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void uart_send_array(uint8_t *arr, uint16_t len)
{
uint16_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(arr[i]);
}
}
void uart_send_string(char *str)
{
uint16_t i = 0;
while(*(str + i) != '\0')
{
uart_send_byte(str[i]);
i++;
}
}
//x的y次方
uint32_t uart_pow(uint32_t x, uint32_t y)
{
uint32_t result = 1;
while(y)
{
result *= x;
y--;
}
return result;
}
void uart_send_number(uint32_t num, uint8_t len)
{
uint8_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(num / uart_pow(10, len - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *fp)
{
uart_send_byte(ch);
return ch;
}
void uart_printf(char *format, ...)
{
char str[128];
va_list arg;
va_start(arg, format);
vsprintf(str, format, arg);
va_end(arg);
uart_send_string(str);
}
void USART1_IRQHandler(void)
{
static uint8_t recvState = 0;
static uint8_t i = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
recvData = USART_ReceiveData(USART1);
//状态机
if (0 == recvState)
{
if (recvData == 0xFF)
{
recvState = 1;
i = 0;
}
}
else if (1 == recvState)
{
recvPacket[i] = recvData;
i++;
if (i >= 4)
{
recvState = 2;
}
}
else if (2 == recvState)
{
if (recvData == 0xFE)
{
i = 0;
recvState = 0;
recvFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
uint8_t uart_getRxFlag(void)
{
if (1 == recvFlag)
{
recvFlag = 0;
return 1;
}
return 0;
}
uint8_t uart_getRxData(void)
{
return recvData;
}
//发送HEX报文数据
void uart_send_packet(uint8_t arr[], int len)
{
//发送报文 FF
uart_send_byte(0xFF);
uart_send_array(arr, len);
//发送报尾
uart_send_byte(0xFE);
}
main.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "oled.h"
#include "uart.h"
int main(void)
{
uint8_t arr[] = {0x1, 0x2, 0x3, 0x4};
OLED_Init();
uart_init();
//中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_ShowChar(1, 1, 'A');
uart_send_packet(arr, 4);
while(1)
{
if (1 == uart_getRxData())
{
OLED_ShowHexNum(1, 1, recvPacket[0], 2);
OLED_ShowHexNum(1, 4, recvPacket[1], 2);
OLED_ShowHexNum(1, 7, recvPacket[2], 2);
OLED_ShowHexNum(1, 10, recvPacket[3], 2);
}
}
return 0;
}
04. 串口收发HEX数据包示例2
uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
extern uint8_t recvPacket[];
void uart_init(void);
void uart_send_byte(uint8_t byte);
void uart_send_array(uint8_t *arr, uint16_t len);
void uart_send_string(char *str);
void uart_send_number(uint32_t num, uint8_t len);
void uart_printf(char *format, ...);
uint8_t uart_getRxFlag(void);
uint8_t uart_getRxData(void);
void uart_send_packet(uint8_t arr[], int len);
#endif /**/
uart.c
#include "uart.h"
#include <stdio.h>
#include <stdarg.h>
uint8_t recvData;
uint8_t recvFlag;
uint8_t recvPacket[32];
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//GPIO初始化 PA10 RX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//设置串口中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//设置中断分组
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void uart_send_array(uint8_t *arr, uint16_t len)
{
uint16_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(arr[i]);
}
}
void uart_send_string(char *str)
{
uint16_t i = 0;
while(*(str + i) != '\0')
{
uart_send_byte(str[i]);
i++;
}
}
//x的y次方
uint32_t uart_pow(uint32_t x, uint32_t y)
{
uint32_t result = 1;
while(y)
{
result *= x;
y--;
}
return result;
}
void uart_send_number(uint32_t num, uint8_t len)
{
uint8_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(num / uart_pow(10, len - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *fp)
{
uart_send_byte(ch);
return ch;
}
void uart_printf(char *format, ...)
{
char str[128];
va_list arg;
va_start(arg, format);
vsprintf(str, format, arg);
va_end(arg);
uart_send_string(str);
}
void USART1_IRQHandler(void)
{
static uint8_t recvState = 0;
static uint8_t i = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t recvData1 = USART_ReceiveData(USART1);
//状态机
if (0 == recvState)
{
if (recvData1 == 0xFF)
{
recvState = 1;
i = 0;
}
}
else if (1 == recvState)
{
recvPacket[i] = recvData1;
i++;
if (i >= 4)
{
recvState = 2;
}
}
else if (2 == recvState)
{
if (recvData1 == 0xFE)
{
recvState = 0;
recvFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
uint8_t uart_getRxFlag(void)
{
if (1 == recvFlag)
{
recvFlag = 0;
return 1;
}
return 0;
}
uint8_t uart_getRxData(void)
{
return recvData;
}
//发送HEX报文数据
void uart_send_packet(uint8_t arr[], int len)
{
//发送报文 FF
uart_send_byte(0xFF);
uart_send_array(arr, len);
//发送报尾
uart_send_byte(0xFE);
}
main.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "oled.h"
#include "uart.h"
#include "key.h"
int main(void)
{
uint8_t arr[] = {0x1, 0x2, 0x3, 0x4};
//中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
key_init();
uart_init();
OLED_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
while(1)
{
if (1 == key_scan())
{
arr[0]++;
arr[1]++;
arr[2]++;
arr[3]++;
uart_send_packet(arr, 4);
OLED_ShowHexNum(2, 1, arr[0], 2);
OLED_ShowHexNum(2, 4, arr[1], 2);
OLED_ShowHexNum(2, 7, arr[2], 2);
OLED_ShowHexNum(2, 10, arr[3], 2);
}
if (1 == uart_getRxData())
{
OLED_ShowHexNum(4, 1, recvPacket[0], 2);
OLED_ShowHexNum(4, 4, recvPacket[1], 2);
OLED_ShowHexNum(4, 7, recvPacket[2], 2);
OLED_ShowHexNum(4, 10, recvPacket[3], 2);
}
}
return 0;
}
05. 串口收发文本数据包接线图

06. 串口收发文本数据包示例
uart.h
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
extern uint8_t Serial_TxPacket[];
extern uint8_t Serial_RxPacket[];
extern uint8_t Serial_RxFlag;
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
void Serial_SendPacket(void);
#endif
uart.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_TxPacket[4]; //FF 01 02 03 04 FE
char Serial_RxPacket[100];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
void Serial_SendPacket(void)
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket, 4);
Serial_SendByte(0xFE);
}
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0)
{
if (RxData == '@' && 0 == Serial_RxFlag)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
if (RxData == '\r')
{
RxState = 2;
}
else
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
}
}
else if (RxState == 2)
{
if (RxData == '\n')
{
RxState = 0;
Serial_RxPacket[pRxPacket] = '\0';
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include <string.h>
int main(void)
{
OLED_Init();
LED_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
while (1)
{
if (Serial_RxFlag == 1)
{
OLED_ShowString(4, 1, " ");
OLED_ShowString(4, 1, Serial_RxPacket);
if (strcmp(Serial_RxPacket, "LED_ON") == 0)
{
LED1_ON();
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_ON_OK");
Serial_SendString("LED_ON_OK\r\n");
}
else if (strcmp(Serial_RxPacket, "LED_OFF") == 0)
{
LED1_OFF();
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_OFF_OK");
Serial_SendString("LED_OFF_OK\r\n");
}
else
{
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "ERROR_COMMAND");
Serial_SendString("ERROR_COMMAND\r\n");
}
Serial_RxFlag = 0;
}
}
}
07. 程序示例下载
24-UART收发HEX数据包
25-UART收发HEX数据包2.rar
26-UART收发文本数据包.rar
08. 附录
参考: 【STM32】江科大STM32学习笔记汇总