说明:介绍 i2c 通讯接口的 eeprom at24cxx 读写测、试代码,代码基于 at24cxx 软件包实现。
使用步骤:
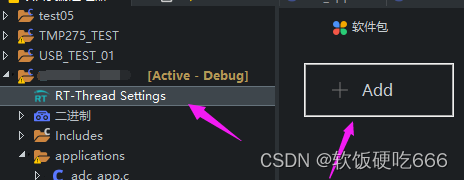
* 1:在 RT-Thread Settings 中开启 【软件模拟I2C】
* 2:在 RT-Thread Settings 软件包中搜索 at24cxx 添加软件包,并保存。
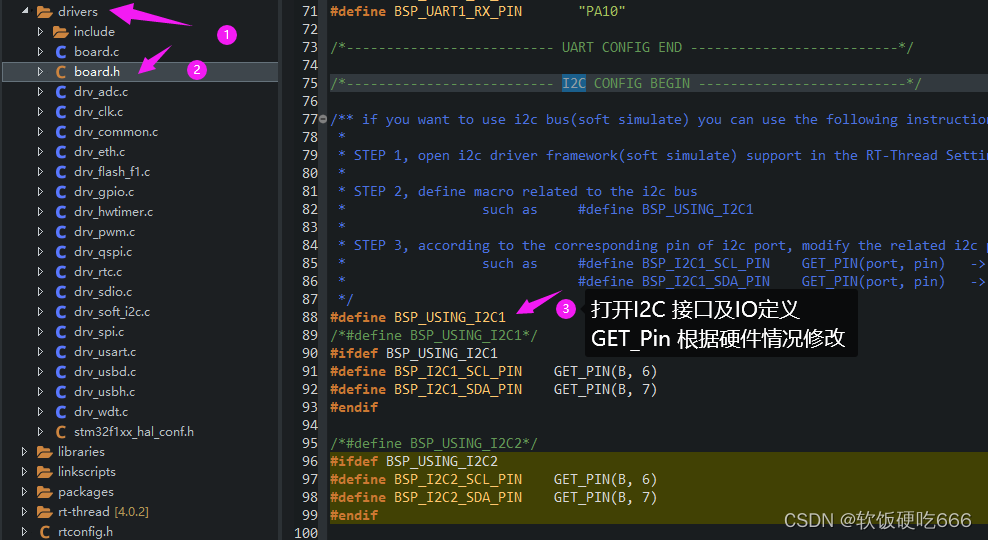
* 3:drivers-> board.h 中打开I2C接口的定义 搜索 I2C CONFIG BEGIN,按介绍定义。
* 4:packages 目录中可以找到添加的软件包,at24cxx.h 中定义 eeprom的型号 ,如 #define EE_TYPE AT24C64
* 软件包提示: 注意事项
* 请在at24cxx.h中修改EE_TYPE为自己使用的型号(默认为AT25C512) 。
* 请在at24cxx.h中修改EE_TWR为自己使用EEPROM的Write Cycle Time,具体值请查看芯片datasheet(默认为5ms) 。
* 从设备地址为7位地址 0x50, 而不是 0xA0 。
1:在 RT-Thread Settings 中开启 【软件模拟I2C】

2:在 RT-Thread Settings 软件包中搜索 at24cxx 添加软件包,添加后并保存。

3:drivers-> board.h 中打开I2C接口的定义 搜索 I2C CONFIG BEGIN,按介绍定义。
4:packages 目录中可以找到添加的软件包,at24cxx.h 中定义 eeprom的型号 ,如 #define EE_TYPE AT24C64
4.1.设置 EEPROM芯片型号,写周期,地址
at24cxx.h 头文件中设置芯片型号,修改写周期(根据芯片手册)
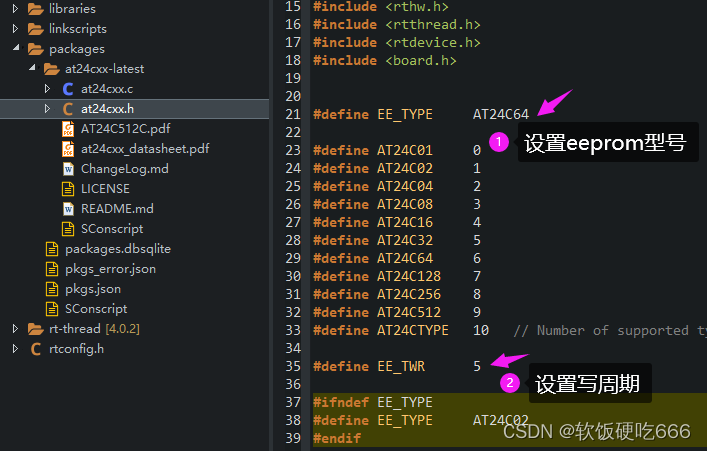
4.2.型号设置好后先编译,编译后对应的 c文件中的相应配置就会打开。

4.3. 芯片地址设置(EEPROM地址一般是 0x50 不含读写标志位及3个IO设置的地址, A0 = A1 = A2 =L 接 GND时地址为0x50;A0 = H, A1 = L, A2 = L 地址为0x51)
5. 测试代码
/*
* Copyright (c) 2006-2020, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 说明:本eeprom 读写测试代码基于 at24cxx 软件包
* 使用步骤:
* 1:在 RT-Thread Settings 中开启 【软件模拟I2C】
* 2:在 RT-Thread Settings 软件包中搜索 at24cxx 添加软件包,并保存。
* 3:drivers-> board.h 中打开I2C接口的定义 搜索 I2C CONFIG BEGIN,按介绍定义。
* 4:packages 目录中可以找到添加的软件包,at24cxx.h 中定义 eeprom的型号 ,如 #define EE_TYPE AT24C64
*
* 软件包提示: 注意事项
* 请在at24cxx.h中修改EE_TYPE为自己使用的型号(默认为AT25C512) 。
* 请在at24cxx.h中修改EE_TWR为自己使用EEPROM的Write Cycle Time,具体值请查看芯片datasheet(默认为5ms) 。
* 从设备地址为7位地址 0x50, 而不是 0xA0 。
*/
#include "user_cfg.h"
#define EEPROM_I2C "i2c1" /* eeprom 所挂载的i2c总线 */
#define EEP_ADDR 0 /* 从设备芯片地址,IC的A2,A1,A0设置的值 */
#define CF_START_ADD 0 /* eeprom 校准系数的首地址 */
//#define EEPROM_TEST_CODE
static at24cxx_device_t eeprom_dev; /* at24cxx 设备对象 */
/* eeprom 设备初始化 */
void eeprom_init(void)
{
eeprom_dev = at24cxx_init(EEPROM_I2C,EEP_ADDR);
if(eeprom_dev == RT_NULL)
{
rt_kprintf(">eeprom 注册失败... \n");
}
}
/* 校准系数保存到 eeprom */
void eeprom_cf_save(void)
{
int8_t temp[CH_NUM*2];
for (int8_t var = 0; var < CH_NUM; ++var)
{
temp[var*2] = Adc_Channel_CF_Data[var]>>8;
temp[var*2+1] = Adc_Channel_CF_Data[var];
}
at24cxx_write(eeprom_dev,CF_START_ADD,(uint8_t *)temp,CH_NUM*2); /*向eeprom 中写入数据*/
rt_kprintf(">校准值已保存到 eeprom ... \n");
}
void eeprom_rw_entry(void *param)
{
rt_kprintf(">eeprom 线程启动... \n");
eeprom_init();
rt_kprintf(">eeprom 初始化完成... \n");
#ifdef EEPROM_TEST_CODE
/* 数据读写测试 */
uint8_t eeprom_RBuffer[254];
uint8_t eeprom_WBuffer[254];
for (uint8_t var = 0; var < 254; ++var)
{
eeprom_WBuffer[var] = var ;
}
at24cxx_write(eeprom_dev,0,eeprom_WBuffer,254); /*向eeprom 中写入数据*/
rt_kprintf("eeprom 数据写入 完成... \n");
rt_thread_mdelay(100);
at24cxx_read(eeprom_dev,0,eeprom_RBuffer,254); /*从eeprom 中读数据*/
rt_kprintf("eeprom 数据读出 完成... \n");
for (uint8_t var = 0; var < 254; ++var)
{
rt_kprintf("ADD = %d ,Data = %d \n",var,eeprom_RBuffer[var]);
}
/* 以上 数据读写测试 */
#endif
uint8_t eeprom_RBuffer[CH_NUM*2];
at24cxx_read(eeprom_dev,CF_START_ADD,eeprom_RBuffer,CH_NUM*2); /*从eeprom 中读数据放入内存*/
for (uint8_t var = 0; var < CH_NUM; ++var) /* eeprom 中的校准数据转换成16bit后给校准值变量,eeprom中存储方式为高位在前,低位在后。*/
{
Adc_Channel_CF_Data[var] = eeprom_RBuffer[2*var];
Adc_Channel_CF_Data[var] = (Adc_Channel_CF_Data[var]<<8)|eeprom_RBuffer[2*var+1];
rt_kprintf("校准值:%011s ,Data = %05d \n",Adc_Channel_Name[var],Adc_Channel_CF_Data[var]);
}
while(1)
{
rt_thread_mdelay(100);
}
}
void eeprom_test(void)
{
rt_thread_t tid1;//创建线程控制块指针来接收线程创建函数的返回值,目的是通过返回值判断线程是否创建ok
/* 创建线程 1,名称是 pt_io_test_entry,入口是 pt_io_test_entry*/
tid1 = rt_thread_create("eeprom_rw_entry",
eeprom_rw_entry, RT_NULL,
1700,//设置内存堆栈大小
10, 50);//设置优先级,时间片参数,时间片是在有多个相同优先级线程时,这个线程每次被执行多少个时间片
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
}
INIT_APP_EXPORT(eeprom_test);6. 项目使用中对软件包函数的一些描述
at24cxx.c
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2019-04-13 XiaojieFan the first version
* 2019-12-04 RenMing ADD PAGE WRITE and input address can be selected
*/
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#include <string.h>
#include <stdlib.h>
#define DBG_ENABLE
#define DBG_SECTION_NAME "at24xx"
#define DBG_LEVEL DBG_LOG
#define DBG_COLOR
#include <rtdbg.h>
#include "at24cxx.h"
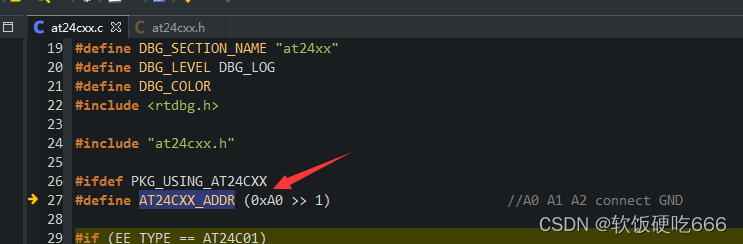
#ifdef PKG_USING_AT24CXX
#define AT24CXX_ADDR (0xA0 >> 1) //A0 = A1 = A2 =L, connect GND
//#define AT24CXX_ADDR (0x51) //A0 = H, A1 = L, A2 = L
#if (EE_TYPE == AT24C01)
#define AT24CXX_PAGE_BYTE 8
#define AT24CXX_MAX_MEM_ADDRESS 128
#elif (EE_TYPE == AT24C02)
#define AT24CXX_PAGE_BYTE 8
#define AT24CXX_MAX_MEM_ADDRESS 256
#elif (EE_TYPE == AT24C04)
#define AT24CXX_PAGE_BYTE 16
#define AT24CXX_MAX_MEM_ADDRESS 512
#elif (EE_TYPE == AT24C08)
#define AT24CXX_PAGE_BYTE 16
#define AT24CXX_MAX_MEM_ADDRESS 1024
#elif (EE_TYPE == AT24C16)
#define AT24CXX_PAGE_BYTE 16
#define AT24CXX_MAX_MEM_ADDRESS 2048
#elif (EE_TYPE == AT24C32)
#define AT24CXX_PAGE_BYTE 32
#define AT24CXX_MAX_MEM_ADDRESS 4096
#elif (EE_TYPE == AT24C64)
#define AT24CXX_PAGE_BYTE 32
#define AT24CXX_MAX_MEM_ADDRESS 8192
#elif (EE_TYPE == AT24C128)
#define AT24CXX_PAGE_BYTE 64
#define AT24CXX_MAX_MEM_ADDRESS 16384
#elif (EE_TYPE == AT24C256)
#define AT24CXX_PAGE_BYTE 64
#define AT24CXX_MAX_MEM_ADDRESS 32768
#elif (EE_TYPE == AT24C512)
#define AT24CXX_PAGE_BYTE 128
#define AT24CXX_MAX_MEM_ADDRESS 65536
#endif
static rt_err_t read_regs(at24cxx_device_t dev, rt_uint8_t len, rt_uint8_t *buf)
{
struct rt_i2c_msg msgs;
msgs.addr = AT24CXX_ADDR | dev->AddrInput;
msgs.flags = RT_I2C_RD;
msgs.buf = buf;
msgs.len = len;
if (rt_i2c_transfer(dev->i2c, &msgs, 1) == 1)
{
return RT_EOK;
}
else
{
return -RT_ERROR;
}
}
/**读取 eeprom 一个字节函数 (YL已验证测试)
* @param dev ,at24cxx 设备对象
* @param readAddr;读取地址
* @return temp;返回读取到的数据
*/
uint8_t at24cxx_read_one_byte(at24cxx_device_t dev, uint16_t readAddr)
{
rt_uint8_t buf[2];
rt_uint8_t temp = 0;
#if (EE_TYPE > AT24C16)
buf[0] = (uint8_t)(readAddr>>8);
buf[1] = (uint8_t)readAddr;
if (rt_i2c_master_send(dev->i2c, AT24CXX_ADDR, 0, buf, 2) == 0)
#else
buf[0] = readAddr;
if (rt_i2c_master_send(dev->i2c, AT24CXX_ADDR | dev->AddrInput, 0, buf, 1) == 0)
#endif
{
return RT_ERROR;
}
read_regs(dev, 1, &temp);
return temp;
}
/**写一个字节 eeprom 函数 (YL已验证测试)
* @param dev ,at24cxx 设备对象
* @param readAddr;写地址
* @param dataToWrite;待写入数据
* @return 写成功,写失败
*/
rt_err_t at24cxx_write_one_byte(at24cxx_device_t dev, uint16_t writeAddr, uint8_t dataToWrite)
{
rt_uint8_t buf[3];
#if (EE_TYPE > AT24C16)
buf[0] = (uint8_t)(writeAddr>>8);
buf[1] = (uint8_t)writeAddr;
buf[2] = dataToWrite;
if (rt_i2c_master_send(dev->i2c, AT24CXX_ADDR, 0, buf, 3) == 3)
#else
buf[0] = writeAddr; //cmd
buf[1] = dataToWrite;
//buf[2] = data[1];
if (rt_i2c_master_send(dev->i2c, AT24CXX_ADDR | dev->AddrInput, 0, buf, 2) == 2)
#endif
return RT_EOK;
else
return -RT_ERROR;
}
rt_err_t at24cxx_read_page(at24cxx_device_t dev, uint32_t readAddr, uint8_t *pBuffer, uint16_t numToRead)
{
struct rt_i2c_msg msgs[2];
uint8_t AddrBuf[2];
msgs[0].addr = AT24CXX_ADDR | dev->AddrInput;
msgs[0].flags = RT_I2C_WR ;
#if (EE_TYPE > AT24C16)
AddrBuf[0] = readAddr >> 8;
AddrBuf[1] = readAddr;
msgs[0].buf = AddrBuf;
msgs[0].len = 2;
#else
AddrBuf[0] = readAddr;
msgs[0].buf = AddrBuf;
msgs[0].len = 1;
#endif
msgs[1].addr = AT24CXX_ADDR | dev->AddrInput;
msgs[1].flags = RT_I2C_RD;
msgs[1].buf = pBuffer;
msgs[1].len = numToRead;
if(rt_i2c_transfer(dev->i2c, msgs, 2) == 0)
{
return RT_ERROR;
}
return RT_EOK;
}
/**写一页 eeprom 函数
* @param dev ,at24cxx 设备对象
* @param readAddr;写地址
* @param *pBuffer;
* @param numToWrite;
* @return 写成功,写失败
*/
rt_err_t at24cxx_write_page(at24cxx_device_t dev, uint32_t wirteAddr, uint8_t *pBuffer, uint16_t numToWrite)
{
struct rt_i2c_msg msgs[2];
uint8_t AddrBuf[2];
msgs[0].addr = AT24CXX_ADDR | dev->AddrInput;
msgs[0].flags = RT_I2C_WR ;
#if (EE_TYPE > AT24C16)
AddrBuf[0] = wirteAddr >> 8;
AddrBuf[1] = wirteAddr;
msgs[0].buf = AddrBuf;
msgs[0].len = 2;
#else
AddrBuf[0] = wirteAddr;
msgs[0].buf = AddrBuf;
msgs[0].len = 1;
#endif
msgs[1].addr = AT24CXX_ADDR | dev->AddrInput;
msgs[1].flags = RT_I2C_WR | RT_I2C_NO_START;
msgs[1].buf = pBuffer;
msgs[1].len = numToWrite;
if(rt_i2c_transfer(dev->i2c, msgs, 2) == 0)
{
return RT_ERROR;
}
return RT_EOK;
}
/**查看是否存在eeprom 设备,通过在最后一个字节写入标志位,进行判断
* @param dev ,at24cxx 设备对象
* @return =RT_EOK 设备存在, != RT_EOK 设备不存在
*/
rt_err_t at24cxx_check(at24cxx_device_t dev)
{
uint8_t temp;
RT_ASSERT(dev);
temp = at24cxx_read_one_byte(dev, AT24CXX_MAX_MEM_ADDRESS - 1);
if (temp == 0x55) return RT_EOK;
else
{
at24cxx_write_one_byte(dev, AT24CXX_MAX_MEM_ADDRESS - 1, 0x55);
rt_thread_mdelay(EE_TWR); // wait 5ms befor next operation
temp = at24cxx_read_one_byte(dev, AT24CXX_MAX_MEM_ADDRESS - 1);
if (temp == 0x55) return RT_EOK;
}
return RT_ERROR;
}
/**连续读取
* This function read the specific numbers of data to the specific position;读取 eeprom ,在AT24CXX里面的指定地址开始读出指定个数的数据
*
* @param bus the name of at24cxx device ; dev:总线at24cxx设备的名称
* @param ReadAddr the start position to read; ReadAddr:读取的起始位置
* @param pBuffer the read data store position; pBuffer:读取数据存储位置
* @param NumToRead; NumToRead:读取数量
* @return RT_EOK write ok. != RT_EOK 读取成功,RT_EOK 读取失败
*/
rt_err_t at24cxx_read(at24cxx_device_t dev, uint32_t ReadAddr, uint8_t *pBuffer, uint16_t NumToRead)
{
rt_err_t result;
RT_ASSERT(dev);
if(ReadAddr + NumToRead > AT24CXX_MAX_MEM_ADDRESS)
{
return RT_ERROR;
}
result = rt_mutex_take(dev->lock, RT_WAITING_FOREVER);
if (result == RT_EOK)
{
while (NumToRead)
{
*pBuffer++ = at24cxx_read_one_byte(dev, ReadAddr++);
NumToRead--;
}
}
else
{
LOG_E("The at24cxx could not respond at this time. Please try again");
}
rt_mutex_release(dev->lock);
return RT_EOK;
}
/**
* This function read the specific numbers of data to the specific position
*
* @param bus the name of at24cxx device
* @param ReadAddr the start position to read
* @param pBuffer the read data store position
* @param NumToRead
* @return RT_EOK write ok.
*/
rt_err_t at24cxx_page_read(at24cxx_device_t dev, uint32_t ReadAddr, uint8_t *pBuffer, uint16_t NumToRead)
{
rt_err_t result = RT_EOK;
uint16_t pageReadSize = AT24CXX_PAGE_BYTE - ReadAddr % AT24CXX_PAGE_BYTE;
RT_ASSERT(dev);
if(ReadAddr + NumToRead > AT24CXX_MAX_MEM_ADDRESS)
{
return RT_ERROR;
}
result = rt_mutex_take(dev->lock, RT_WAITING_FOREVER);
if(result == RT_EOK)
{
while (NumToRead)
{
if(NumToRead > pageReadSize)
{
if(at24cxx_read_page(dev, ReadAddr, pBuffer, pageReadSize))
{
result = RT_ERROR;
}
ReadAddr += pageReadSize;
pBuffer += pageReadSize;
NumToRead -= pageReadSize;
pageReadSize = AT24CXX_PAGE_BYTE;
}
else
{
if(at24cxx_read_page(dev, ReadAddr, pBuffer, NumToRead))
{
result = RT_ERROR;
}
NumToRead = 0;
}
}
}
else
{
LOG_E("The at24cxx could not respond at this time. Please try again");
}
rt_mutex_release(dev->lock);
return result;
}
/**连续写入
* This function write the specific numbers of data to the specific position;写入,在AT24CXX里面的指定地址开始写入指定个数的数据
*
* @param bus the name of at24cxx device;at24cxx dev:设备对象
* @param WriteAddr the start position to write; WriteAddr:写入的首地址
* @param pBuffer the data need to write; *pBuffer:需要写入的数据的首地址
* @param NumToWrite; NumToWrite:写入数量
* @return RT_EOK write ok.at24cxx_device_t dev
*/
rt_err_t at24cxx_write(at24cxx_device_t dev, uint32_t WriteAddr, uint8_t *pBuffer, uint16_t NumToWrite)
{
//rt_err_t ret; /*YL新增*/
uint16_t i = 0;
rt_err_t result;
RT_ASSERT(dev);
if(WriteAddr + NumToWrite > AT24CXX_MAX_MEM_ADDRESS)
{
return RT_ERROR;
}
result = rt_mutex_take(dev->lock, RT_WAITING_FOREVER);
if (result == RT_EOK)
{
/*以下 原源代码*/
while (1) //NumToWrite--
{
if (at24cxx_write_one_byte(dev, WriteAddr, pBuffer[i]) != RT_EOK)
{
rt_thread_mdelay(EE_TWR);
}
else
{
WriteAddr++;
i++;
}
if (i == NumToWrite)
{
break;
}
}
/*以上 原源代码*/
// while (1) //NumToWrite--
// {
// ret = at24cxx_write_one_byte(dev, WriteAddr, pBuffer[i]);
// if (at24cxx_write_one_byte(dev, WriteAddr, pBuffer[i]) != RT_EOK)
// {
// rt_thread_mdelay(EE_TWR);
// }
// else
// {
// WriteAddr++;
// i++;
// }
// if (i == NumToWrite)
// {
// break;
// }
//
// }
}
else
{
LOG_E("The at24cxx could not respond at this time. Please try again");
}
rt_mutex_release(dev->lock);
return RT_EOK;
}
/**此函数将特定数量的数据写入特定位置
* This function write the specific numbers of data to the specific position
*
* @param bus the name of at24cxx device; dev:设备对象
* @param WriteAddr the start position to write; WriteAddr:写入的首地址
* @param pBuffer the data need to write *pBuffer:需要写入的数据的首地址
* @param NumToWrite NumToWrite:写入数量
* @return RT_EOK write ok.at24cxx_device_t dev
*/
rt_err_t at24cxx_page_write(at24cxx_device_t dev, uint32_t WriteAddr, uint8_t *pBuffer, uint16_t NumToWrite)
{
rt_err_t result = RT_EOK;
uint16_t pageWriteSize = AT24CXX_PAGE_BYTE - WriteAddr % AT24CXX_PAGE_BYTE;
RT_ASSERT(dev);
if(WriteAddr + NumToWrite > AT24CXX_MAX_MEM_ADDRESS)
{
return RT_ERROR;
}
result = rt_mutex_take(dev->lock, RT_WAITING_FOREVER);
if(result == RT_EOK)
{
while (NumToWrite)
{
if(NumToWrite > pageWriteSize)
{
if(at24cxx_write_page(dev, WriteAddr, pBuffer, pageWriteSize))
{
result = RT_ERROR;
}
rt_thread_mdelay(EE_TWR); // wait 5ms befor next operation
WriteAddr += pageWriteSize;
pBuffer += pageWriteSize;
NumToWrite -= pageWriteSize;
pageWriteSize = AT24CXX_PAGE_BYTE;
}
else
{
if(at24cxx_write_page(dev, WriteAddr, pBuffer, NumToWrite))
{
result = RT_ERROR;
}
rt_thread_mdelay(EE_TWR); // wait 5ms befor next operation
NumToWrite = 0;
}
}
}
else
{
LOG_E("The at24cxx could not respond at this time. Please try again");
}
rt_mutex_release(dev->lock);
return result;
}
/**设备初始化
* This function initializes at24cxx registered device driver ;根据总线名称,自动初始化对应的 AT24CXX 设备
*
* @param dev the name of at24cxx device ;i2c_bus_name,i2c 设备名称
* @param
* @return the at24cxx device.
*/
at24cxx_device_t at24cxx_init(const char *i2c_bus_name, uint8_t AddrInput)
{
at24cxx_device_t dev;
RT_ASSERT(i2c_bus_name);
dev = rt_calloc(1, sizeof(struct at24cxx_device));
if (dev == RT_NULL)
{
LOG_E("Can't allocate memory for at24cxx device on '%s' ", i2c_bus_name);
return RT_NULL;
}
dev->i2c = rt_i2c_bus_device_find(i2c_bus_name);
if (dev->i2c == RT_NULL)
{
LOG_E("Can't find at24cxx device on '%s' ", i2c_bus_name);
rt_free(dev);
return RT_NULL;
}
dev->lock = rt_mutex_create("mutex_at24cxx", RT_IPC_FLAG_FIFO);
if (dev->lock == RT_NULL)
{
LOG_E("Can't create mutex for at24cxx device on '%s' ", i2c_bus_name);
rt_free(dev);
return RT_NULL;
}
dev->AddrInput = AddrInput;
return dev;
}
/**
* This function releases memory and deletes mutex lock
* 如果设备不再使用,反初始化将回收 at24cxx 设备的相关资源
* @param dev the pointer of device driver structure
*/
void at24cxx_deinit(at24cxx_device_t dev)
{
RT_ASSERT(dev);
rt_mutex_delete(dev->lock);
rt_free(dev);
}
uint8_t TEST_BUFFER[] = "WELCOM TO RTT";
#define SIZE sizeof(TEST_BUFFER)
void at24cxx(int argc, char *argv[])
{
static at24cxx_device_t dev = RT_NULL;
if (argc > 1)
{
if (!strcmp(argv[1], "probe"))
{
if (argc > 2)
{
/* initialize the sensor when first probe */
if (!dev || strcmp(dev->i2c->parent.parent.name, argv[2]))
{
/* deinit the old device */
if (dev)
{
at24cxx_deinit(dev);
}
dev = at24cxx_init(argv[2], atoi(argv[3]));
}
}
else
{
rt_kprintf("at24cxx probe <dev_name> <AddrInput> - probe sensor by given name\n");
}
}
else if (!strcmp(argv[1], "read"))
{
if (dev)
{
uint8_t testbuffer[50];
/* read the eeprom data */
at24cxx_read(dev, 0, testbuffer, SIZE);
rt_kprintf("read at24cxx : %s\n", testbuffer);
}
else
{
rt_kprintf("Please using 'at24cxx probe <dev_name>' first\n");
}
}
else if (!strcmp(argv[1], "write"))
{
at24cxx_write(dev, 0, TEST_BUFFER, SIZE);
rt_kprintf("write ok\n");
}
else if (!strcmp(argv[1], "check"))
{
if (at24cxx_check(dev) == 1)
{
rt_kprintf("check faild \n");
}
}
else
{
rt_kprintf("Unknown command. Please enter 'at24cxx0' for help\n");
}
}
else
{
rt_kprintf("Usage:\n");
rt_kprintf("at24cxx probe <dev_name> - probe eeprom by given name\n");
rt_kprintf("at24cxx check - check eeprom at24cxx \n");
rt_kprintf("at24cxx read - read eeprom at24cxx data\n");
rt_kprintf("at24cxx write - write eeprom at24cxx data\n");
}
}
MSH_CMD_EXPORT(at24cxx, at24cxx eeprom function);
#endifat24cxx.h
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2019-04-13 XiaojieFan the first version
* 2019-12-04 RenMing Use PAGE WRITE instead of BYTE WRITE and input address can be selected
*/
#ifndef __AT24CXX_H__
#define __AT24CXX_H__
#include <rthw.h>
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#define AT24C01 0
#define AT24C02 1
#define AT24C04 2
#define AT24C08 3
#define AT24C16 4
#define AT24C32 5
#define AT24C64 6
#define AT24C128 7
#define AT24C256 8
#define AT24C512 9
#define AT24CTYPE 10 // Number of supported types
/*
*注意事项:
*请在at24cxx.h中修改EE_TYPE为自己使用的型号(默认为AT25C512) 。
*请在at24cxx.h中修改EE_TWR为自己使用EEPROM的Write Cycle Time,具体值请查看芯片datasheet(默认为5ms) 。
*从设备地址为7位地址 0x50, 而不是 0xA0 。
*/
#define EE_TWR 5 //Write Cycle Time;写周期时间 ms
#ifndef EE_TYPE
#define EE_TYPE AT24C64
#endif
struct at24cxx_device
{
struct rt_i2c_bus_device *i2c;
rt_mutex_t lock;
uint8_t AddrInput;
};
typedef struct at24cxx_device *at24cxx_device_t;
extern uint8_t at24cxx_read_one_byte(at24cxx_device_t dev, uint16_t readAddr);
extern rt_err_t at24cxx_write_one_byte(at24cxx_device_t dev, uint16_t writeAddr, uint8_t dataToWrite);
extern at24cxx_device_t at24cxx_init(const char *i2c_bus_name, uint8_t AddrInput);
extern rt_err_t at24cxx_read(at24cxx_device_t dev, uint32_t ReadAddr, uint8_t *pBuffer, uint16_t NumToRead);
extern rt_err_t at24cxx_write(at24cxx_device_t dev, uint32_t WriteAddr, uint8_t *pBuffer, uint16_t NumToWrite);
extern rt_err_t at24cxx_page_read(at24cxx_device_t dev, uint32_t ReadAddr, uint8_t *pBuffer, uint16_t NumToRead);
extern rt_err_t at24cxx_page_write(at24cxx_device_t dev, uint32_t WriteAddr, uint8_t *pBuffer, uint16_t NumToWrite);
#endif


![[易语言]易语言部署yolox的onnx模型](https://img-blog.csdnimg.cn/direct/6f91a98289da4c2d825e1245af03ddc7.jpeg)