在pointpillars完成训练后,可以看到对于目标检测的评估,据了解,这是kitti的标准目标检测格式,所以了解了一下.

在generate label finished后,可以看到类别Car对应的AP(Average precision)有3个0.70,分别对应的是Kitti object detection中,被分为Easy, Moderate,和Hard三种级别物体的最小IoU阈值.换言之,检测到IoU小于70%的不算检测成功.
下面是检测所对应的难度级别标准,简单的物体 bounding box大,没有遮掩. 难的相反.
- Easy: Min. bounding box height: 40 Px, Max. occlusion level: Fully visible, Max. truncation: 15 %
- Moderate: Min. bounding box height: 25 Px, Max. occlusion level: Partly occluded, Max. truncation: 30 %
- Hard: Min. bounding box height: 25 Px, Max. occlusion level: Difficult to see, Max. truncation: 50 %
下面的检测指标分为四种指标,
- bbox:2D检测框的准确率,
- bev: BEV视图下检测框的准确率,
- 3d: 3D检测框的准确率,
- aos: 检测目标旋转角度的准确率
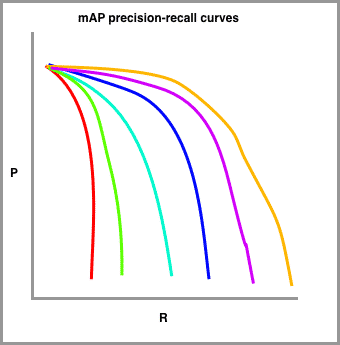
AP的指标计算比较复杂,总之除了coco之外,我的理解是:在不同的confidence阈值下, 计算recall和precision,然后得到一张曲线图,计算曲线图的面积,最后得到AP.
而对于COCO方式,它使用了最小IoU作为变量,然后选择计算在不同IoU要求下的recall precison,然后得到最终结果.
参考链接: Mean Average Precision (mAP) in Object Detection