一.感知器的发展过程
感知器的发展可以追溯到20世纪50年代。它是一种简单的人工神经网络模型,最早由美国心理学家和计算机科学家弗兰克·罗森布拉特(Frank Rosenblatt)于1957年提出。感知器的设计灵感来源于生物神经元的工作原理,旨在模拟人脑中神经元的基本功能。
为了解决感知器的线性可分问题, 在20世纪80年代多层感知器(MLP)被引入,通过在感知器之间增加多个层次和非线性激活函数,这为神经网络的发展打开了新的方向。随着计算能力的提高和深度学习的兴起,神经网络经历了复兴。感知器作为其基础结构之一,成为深度学习领域的重要组成部分。
二.感知器的概念和基本结构
感知器接收多个输入,对每个输入乘以相应的权重,并将这些加权输入求和。然后,通过激活函数(通常是阶跃函数)对这个总和进行非线性转换,得到最终的输出。感知器主要用于二分类问题,可以学习将输入分为两个类别。
虽然感知器在某些任务上表现良好,但它有一些限制,例如只能解决线性可分问题。后来的神经网络模型,特别是多层感知器(MLP)通过引入更多的层和非线性激活函数,克服了感知器的一些局限性,使得神经网络能够更好地处理复杂的模式和任务。
感知器的基本结构包括以下组成部分:
输入层(Input Layer):
输入层接收来自外部环境的输入数据,每个输入都有一个相关联的权重。输入层的每个节点代表输入特征,例如图像中的像素或其他类型的特征。
权重(Weights):
感知器对每个输入特征分配一个权重,这个权重表示了该输入在模型中的重要性。权重越大,对应输入的影响越大。
加权和(Weighted Summation):
输入层的每个节点的值与其对应的权重相乘,然后所有加权的输入值被求和,形成加权和。
激活函数(Activation Function):
感知器使用激活函数来决定输出的形式。最初感知器使用的是阶跃函数(Step Function),其输出是根据加权和的阈值进行二元分类。
阈值(Threshold):
阈值是一个确定感知器是否激活的参数。当加权和超过阈值时,感知器被激活,输出为1;否则,输出为0。
感知器的工作原理可以简要总结为:对于输入层的每个节点,将其输入值与相应的权重相乘,然后将所有加权和传递给激活函数。激活函数根据阈值判断是否激活感知器,并输出相应的二进制值。
尽管感知器在简单问题上表现良好,但由于其线性结构和阶跃函数的使用,它存在一些局限性,特别是只能解决线性可分问题。然而,感知器为神经网络的发展提供了基础,后来的模型通过引入更复杂的结构和非线性激活函数,克服了感知器的一些限制。
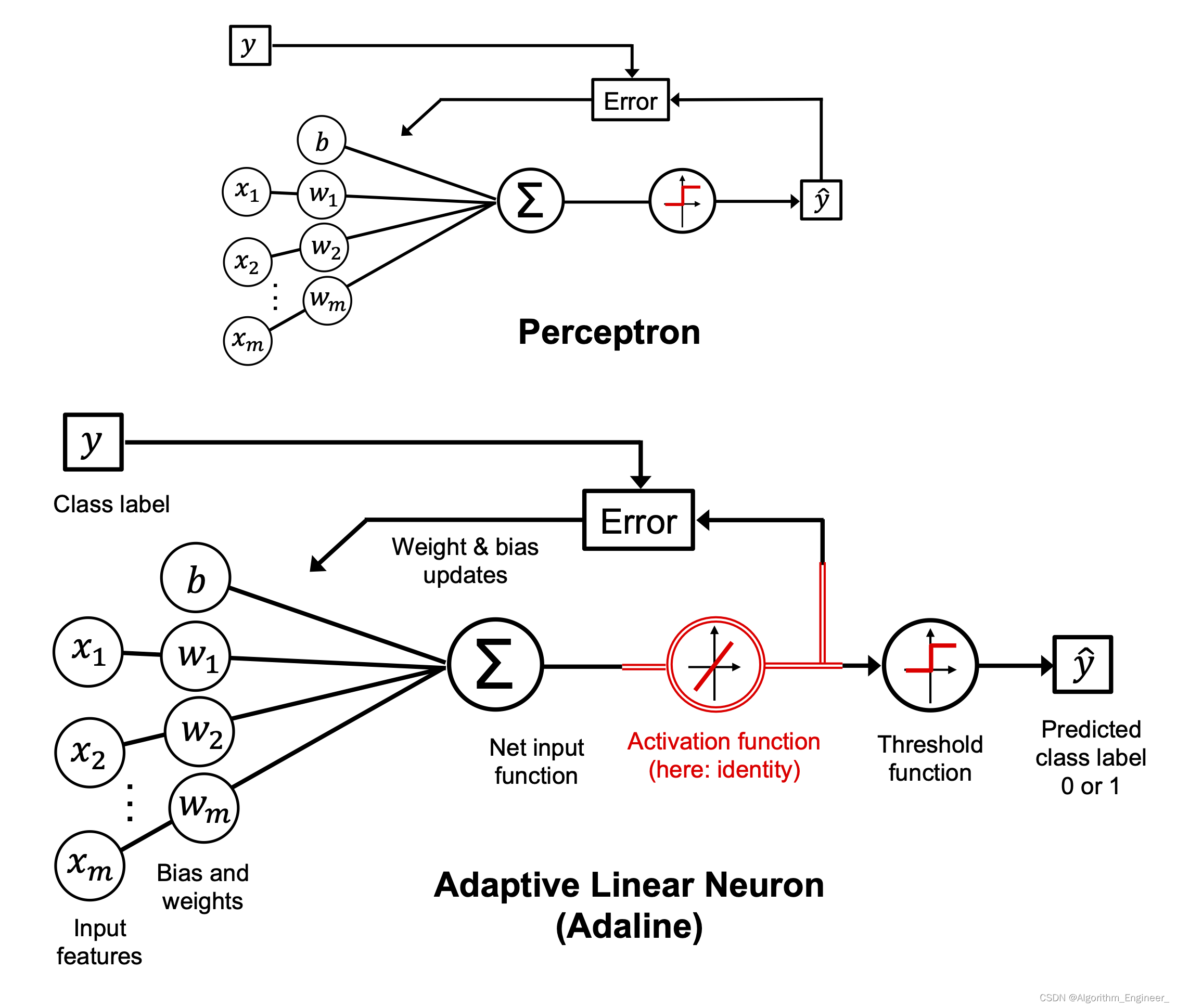
下图是简单的一个误差函数更新感知器权重和偏置项的图
三.感知器和线性回归算法之间的区别
感知器和线性回归算法有一些相似之处,但也存在一些关键的区别。
任务类型:
感知器通常用于分类任务,特别是二分类问题。它的目标是将输入分为两个类别。
线性回归则用于预测连续数值的问题。它试图拟合数据点之间的线性关系,以预测一个实数值。
输出类型:
感知器的输出通常是一个二进制值,表示输入属于某个类别的概率。
线性回归的输出是一个连续的实数值,可以是任何实数。
激活函数:
感知器使用非线性激活函数(例如阶跃函数),以便处理非线性分类问题。
线性回归通常没有激活函数,因为它旨在建模线性关系。
损失函数:
感知器通常使用误分类损失函数,目标是最小化错误分类的样本。
线性回归通常使用平方损失函数,目标是最小化预测值与实际值之间的平方差。
训练算法:
感知器使用感知器学习规则进行权重更新,通过迭代学习样本进行分类。
线性回归通常使用梯度下降或其变体,通过最小化损失函数来拟合数据。
虽然感知器在某些简单的分类问题上表现良好,但由于其局限性,如只能解决线性可分问题,更复杂的任务通常需要使用更先进的神经网络结构或其他机器学习算法,包括线性回归。
四.感知器的应用
感知器在其最初提出时主要应用于简单的模式识别和二分类问题。随着神经网络的发展,感知器的应用也逐渐扩展到更广泛的领域。以下是感知器及其演变形式的一些应用:
比如下面应用感知器解决实际问题的应用
模式识别:
在感知器最初提出的阶段,它主要用于模式识别任务,尤其是辨别简单的形状、图案或对象。感知器的设计灵感来源于对生物神经元的模拟,旨在通过简单的神经网络结构来实现基本的模式识别功能。在这个初期阶段,感知器被广泛应用于以下方面:
形状和图案识别:
感知器被用于识别简单形状和图案,例如在图像中识别基本的几何形状。
模式分类:
它被用于对输入模式进行分类,将它们划分为不同的类别。这使得感知器在简单的模式分类任务中表现得相当有效。
目标识别:
感知器被尝试用于在图像中识别特定的目标,虽然在处理复杂场景和非线性特征时其性能受到了限制。
实验性研究:
在早期阶段,感知器的提出引起了许多实验性研究,试图了解它在不同模式和形状识别任务中的适用性。
字符识别:
感知器被用于字符识别,例如手写数字的识别。这是早期计算机视觉应用的一个例子。
计算机视觉:
感知器在其最初的形式中主要用于简单的模式识别和二分类问题,而且它的局限性使得在复杂的计算机视觉任务中应用受到限制。
在计算机视觉领域,后续的神经网络结构如多层感知器(MLP)和卷积神经网络(CNN)更为成功,并在物体检测、图像分类、人脸识别等任务上取得了显著的成果。
感知器在计算机视觉中的局限性主要表现在以下方面:
线性分类能力:感知器是线性分类器,只能学习和表示线性决策边界。对于复杂的视觉数据,如图像中的非线性结构和特征,感知器的表现相对有限。
有限的模型复杂度:感知器是单层的神经网络,无法捕捉图像中的多层次抽象特征。计算机视觉任务通常需要更深层次的网络结构,以处理图像中的层次结构和抽象。
对平移和变形敏感:感知器对于输入数据的平移和变形非常敏感,这在处理图像时可能导致性能下降。卷积神经网络(CNN)引入了卷积层来处理平移不变性。
限制的模型表达能力:感知器的模型表达能力有限,难以适应复杂的视觉场景,如多物体之间的关系和语境。
虽然感知器在计算机视觉中的应用受到了限制,但随着神经网络的进一步发展,特别是卷积神经网络(CNN)的出现,计算机视觉任务的性能得到了显著提升。CNN等深度学习模型已经成为计算机视觉任务中的主流方法,成功应用于图像分类、目标检测、人脸识别等领域。
自然语言处理:
实际上,感知器在自然语言处理任务中表现相对有限,而更复杂的神经网络结构,特别是深度学习模型,在这些任务中取得了显著的进展。
感知器的主要局限性,如线性结构和对非线性模式的限制,使得它在处理自然语言中的复杂语义和结构方面相对不足。
相反,深度学习模型通过引入更复杂的网络结构和学习更高级的表示,能够更好地捕捉文本中的语义信息。
金融领域:
在金融领域,感知器确实可以用于一些基本的任务,如信用评分和欺诈检测。这些任务通常是分类问题,其中感知器可以被用来根据输入特征对个体或交易进行分类。然而,需要注意的是,感知器在处理复杂和高维度的金融数据时,可能会受到一些限制,尤其是在与更先进的机器学习模型相比较时。以下是感知器在金融领域可能应用的一些任务:
信用评分:
感知器可以用于分析个体的信用历史、收入、支出等信息,以确定其信用分数。这有助于金融机构做出是否批准贷款或信用卡申请的决策。
欺诈检测:
感知器可以用于检测金融交易中的欺诈行为。通过分析交易的模式、异常行为和其他特征,感知器可以帮助自动识别潜在的欺诈活动。
风险管理:
在金融领域,感知器可以用于识别潜在的风险,包括市场波动、投资风险等。这有助于金融机构更好地管理其投资组合。
市场预测:
感知器可以用于分析历史市场数据,预测股票价格趋势或其他金融市场的变化。然而,对于更复杂的市场预测任务,可能需要更强大的模型。
客户分类:
通过分析客户的行为、购买历史和其他特征,感知器可以用于对客户进行分类,以更好地了解其需求、制定个性化的金融服务。
需要注意的是,对于一些复杂、高维度的金融数据,更先进的机器学习模型,如深度学习模型,可能更适合处理,因为它们能够更好地捕捉数据中的非线性关系和复杂模式。
感知器的优势在于其简单性和易解释性,但在处理某些金融任务时,可能需要更复杂的模型来提高性能。
工业领域:
在工业领域,感知器和神经网络可用于质量控制、预测性维护等应用。
交通领域:
交通管理、智能交通系统中,感知器和神经网络可以用于交通流量监测、车辆识别等任务。
游戏开发:
在游戏开发中,感知器和神经网络被用于创建智能游戏角色、调整游戏难度等方面。
五.感知器的局限性
感知器虽然是神经网络的基础,但它存在一些显著的局限性,其中一些限制在后续的深度学习模型中得到克服。以下是感知器的一些主要局限性:
线性可分问题:
感知器只能解决线性可分问题,即可以通过一条直线将两个类别完全分开的问题。对于非线性可分的数据,感知器无法有效分类。
阶跃函数的问题:
感知器的激活函数通常是阶跃函数,这导致模型不可导,使得梯度下降等优化方法难以应用。这在训练中可能引起不稳定性和收敛问题。
无法学习复杂模式:
由于感知器的结构较简单,它无法学习复杂的模式和特征,限制了其在处理真实世界复杂数据上的性能。
只适用于单层网络:
感知器是单层的神经网络,无法捕捉数据中的多层次抽象特征。这导致它在处理复杂任务上的表现相对较差。
不具备推广能力:
感知器在训练集上表现良好,但在未见过的数据上缺乏推广能力。它容易过拟合训练数据,对新样本的泛化能力有限。
对噪声敏感:
感知器对输入数据中的噪声非常敏感,这可能导致错误分类。它缺乏对数据的鲁棒性。
无法处理非平稳数据:
对于非平稳的输入数据,感知器的权重调整可能不够灵活,导致模型性能下降。
缺乏学习能力:
感知器只能进行有监督学习,而且在训练后无法进一步学习新的信息,这限制了其在动态环境中的适应性。
虽然感知器本身存在这些限制,但它为后续神经网络的发展奠定了基础。通过引入更复杂的结构、非线性激活函数和深度学习方法,研究人员成功地克服了感知器的一些局限性,使神经网络能够更好地处理复杂的任务。
Adaline规则
Adaline(自适应线性神经元)是一种线性神经元模型,是感知器的改进版本。Adaline引入了连续的激活函数和一种权重调整规则,这使得它能够对连续范围的输出进行回归。Adaline的权重调整规则通常被称为Adaline规则。
Adaline规则的主要目标是通过梯度下降算法最小化损失函数,从而调整模型的权重以适应输入数据。与感知器的阶跃函数不同,Adaline使用线性激活函数,并根据梯度下降的原理进行权重的更新。
Adaline的基本步骤如下:
初始化权重:
随机初始化模型的权重。
计算输出:
对于给定的输入,计算Adaline的输出。输出是输入特征与相应权重的加权和,不再通过阶跃函数。
计算损失:
计算实际输出与期望输出之间的误差(损失)。通常使用均方误差(Mean Squared Error,MSE)作为损失函数。
更新权重:
根据梯度下降的原理,使用损失函数的梯度来更新模型的权重。更新规则可以表示为:
w=w+η⋅Δww=w+η⋅Δw
其中,ww是权重,ηη是学习率,ΔwΔw是权重的梯度。梯度的计算涉及到对损失函数关于权重的偏导数。
重复迭代:
重复执行步骤2至步骤4,直到达到停止条件,如达到最大迭代次数或损失降到某个阈值以下。
Adaline规则使得模型能够学习适应输入数据的线性关系,并通过梯度下降调整权重,以最小化预测值与实际值之间的误差。这使得Adaline适用于回归问题,不再受限于感知器的二元分类。然而,Adaline仍然对于非线性可分问题可能不够有效。
感知器学习算法和Adaline规则的区别
Adaline(自适应线性神经元)和感知机是两种线性分类器,它们在某些方面相似,但也存在一些关键的区别。以下是Adaline和感知机之间的主要区别:
激活函数:
感知机:使用阶跃函数(Step Function)作为激活函数。这意味着感知机的输出是二元的,只能取0或1。
Adaline:使用线性激活函数。Adaline的输出是一个连续范围内的值,而不再受到二元输出的限制。
权重调整规则:
感知机:权重调整规则基于误差的乘性调整,是通过误差信号与输入特征的乘积来调整权重的。
Adaline:使用梯度下降算法,通过损失函数的梯度对权重进行线性调整。Adaline的权重更新规则是基于损失函数的梯度下降,这使得它能够进行回归任务。
输出:
感知机:输出是二元的,通常用于二分类问题。
Adaline:输出是连续范围内的值,通常用于回归任务。
收敛性:
感知机:对于线性可分问题,感知机保证在有限步骤内收敛。然而,对于线性不可分的情况,感知机可能永远无法收敛。
Adaline:由于使用了梯度下降,Adaline通常能够收敛到较好的解决方案,即使是在线性不可分的情况下也有可能。
应用:
感知机:主要用于简单的线性可分任务,如二分类问题。
Adaline:更适用于回归问题,可以输出连续值,也可以用于分类任务。
总的来说,Adaline是对感知机的改进,主要区别在于激活函数的变化、权重调整规则的改变和输出的连续性。Adaline的引入使得线性神经元模型更加灵活,能够处理更多类型的任务。