DETR的损失函数包括几个部分,如果只看论文或者代码,比较难理解,最好是可以打断点调试,对照着论文看。但是现在DETR模型都已经被集成进各种框架中,很难进入内部打断掉调试。与此同时,数据的label的前处理也比较麻烦。本文中提供的代码做好了数据标签的预处理,可以在中间打断点调试,观察每部分损失函数究竟是如何计算的。
首先,从hugging face的transformers库中拿出detr segmentation的model,并准备数据,数据是coco dataset数据集的panoptic,根据coco的json文件和mask图片,制作label:
from transformers import DetrConfig, DetrForSegmentation
model = DetrForSegmentation.from_pretrained("facebook/detr-resnet-50-panoptic")
state_dict = model.state_dict()
# Remove class weights
del state_dict["detr.class_labels_classifier.weight"]
del state_dict["detr.class_labels_classifier.bias"]
# define new model with custom class classifier
config = DetrConfig.from_pretrained("facebook/detr-resnet-50-panoptic", num_labels=250)
model.load_state_dict(state_dict, strict=False)
model.to("cuda")
# print(model.config)
import torch
import json
from pathlib import Path
from PIL import Image
from transformers import DetrFeatureExtractor
import numpy as np
import matplotlib.pyplot as plt
class CocoPanoptic(torch.utils.data.Dataset):
def __init__(self, img_folder, ann_folder, ann_file, feature_extractor):
with open(ann_file, 'r') as f:
self.coco = json.load(f)
# sort 'images' field so that they are aligned with 'annotations'
# i.e., in alphabetical order
self.coco['images'] = sorted(self.coco['images'], key=lambda x: x['id'])
# sanity check
if "annotations" in self.coco:
for img, ann in zip(self.coco['images'], self.coco['annotations']):
assert img['file_name'][:-4] == ann['file_name'][:-4]
self.img_folder = img_folder
self.ann_folder = Path(ann_folder)
self.ann_file = ann_file
self.feature_extractor = feature_extractor
def __getitem__(self, idx):
ann_info = self.coco['annotations'][idx] if "annotations" in self.coco else self.coco['images'][idx]
img_path = Path(self.img_folder) / ann_info['file_name'].replace('.png', '.jpg')
img = Image.open(img_path).convert('RGB')
width = 400
height = 600
img = img.resize((width, height))
# preprocess image and target (converting target to DETR format, resizing + normalization of both image and target)
encoding = self.feature_extractor(images=img, annotations=ann_info, masks_path=self.ann_folder, return_tensors="pt")
pixel_values = encoding["pixel_values"].squeeze() # remove batch dimension
target = encoding["labels"][0] # remove batch dimension
return pixel_values, target
def __len__(self):
return len(self.coco['images'])
# we reduce the size and max_size to be able to fit the batches in GPU memory
feature_extractor = DetrFeatureExtractor.from_pretrained("facebook/detr-resnet-50-panoptic", size=500, max_size=600)
dataset = CocoPanoptic(img_folder='/home/robotics/Downloads/coco2017/val2017',
ann_folder='/home/robotics/Downloads/coco2017/Mask/panoptic mask/panoptic_val2017', # mask folder path
ann_file='/home/robotics/Downloads/coco2017/annotations/panoptic_val2017.json',
feature_extractor=feature_extractor)
# let's split it up into very tiny training and validation sets using random indices
np.random.seed(42)
indices = np.random.randint(low=0, high=len(dataset), size=50)
train_dataset = torch.utils.data.Subset(dataset, indices[:40])
val_dataset = torch.utils.data.Subset(dataset, indices[40:])
pixel_values, target = train_dataset[2]
print(pixel_values.shape)
print(target.keys())
# label_masks = target["masks"]
# boxes = target["boxes"]
# labels = target["class_labels"]
from torch.utils.data import DataLoader
def collate_fn(batch):
pixel_values = [item[0] for item in batch]
encoded_input = feature_extractor.pad(pixel_values, return_tensors="pt")
labels = [item[1] for item in batch]
batch = {}
batch['pixel_values'] = encoded_input['pixel_values']
batch['pixel_mask'] = encoded_input['pixel_mask']
batch['labels'] = labels
return batch
train_dataloader = DataLoader(train_dataset, collate_fn=collate_fn, batch_size=2, shuffle=True)
val_dataloader = DataLoader(val_dataset, collate_fn=collate_fn, batch_size=1)
# for idx, batch in enumerate(train_dataloader):
# pixel_values = batch["pixel_values"].to("cuda")
# pixel_mask = batch["pixel_mask"].to("cuda")
# labels = [{k: v.to("cuda") for k, v in t.items()} for t in batch["labels"]]
#
# outputs = model(pixel_values=pixel_values, pixel_mask=pixel_mask, labels=labels)
#
# loss = outputs.loss
# loss_dict = outputs.loss_dict
#
# print("done")
然后再创建一个py文件,写入下面的代码,就可以打断点观察loss的计算了:
import torch.nn as nn
from collections import OrderedDict
import importlib.util
import torch
from torch import Tensor
from scipy.optimize import linear_sum_assignment
from typing import Dict, List, Optional, Tuple
# docstyle-ignore
SCIPY_IMPORT_ERROR = """
{0} requires the scipy library but it was not found in your environment. You can install it with pip:
`pip install scipy`
"""
def is_scipy_available():
return importlib.util.find_spec("scipy") is not None
BACKENDS_MAPPING = OrderedDict(
[
("scipy", (is_scipy_available, SCIPY_IMPORT_ERROR)),
]
)
def requires_backends(obj, backends):
if not isinstance(backends, (list, tuple)):
backends = [backends]
name = obj.__name__ if hasattr(obj, "__name__") else obj.__class__.__name__
checks = (BACKENDS_MAPPING[backend] for backend in backends)
failed = [msg.format(name) for available, msg in checks if not available()]
if failed:
raise ImportError("".join(failed))
def _upcast(t: Tensor) -> Tensor:
# Protects from numerical overflows in multiplications by upcasting to the equivalent higher type
if t.is_floating_point():
return t if t.dtype in (torch.float32, torch.float64) else t.float()
else:
return t if t.dtype in (torch.int32, torch.int64) else t.int()
def box_area(boxes: Tensor) -> Tensor:
"""
Computes the area of a set of bounding boxes, which are specified by its (x1, y1, x2, y2) coordinates.
Args:
boxes (`torch.FloatTensor` of shape `(number_of_boxes, 4)`):
Boxes for which the area will be computed. They are expected to be in (x1, y1, x2, y2) format with `0 <= x1
< x2` and `0 <= y1 < y2`.
Returns:
`torch.FloatTensor`: a tensor containing the area for each box.
"""
boxes = _upcast(boxes)
return (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1])
def box_iou(boxes1, boxes2):
area1 = box_area(boxes1)
area2 = box_area(boxes2)
left_top = torch.max(boxes1[:, None, :2], boxes2[:, :2]) # [N,M,2]
right_bottom = torch.min(boxes1[:, None, 2:], boxes2[:, 2:]) # [N,M,2]
width_height = (right_bottom - left_top).clamp(min=0) # [N,M,2]
inter = width_height[:, :, 0] * width_height[:, :, 1] # [N,M]
union = area1[:, None] + area2 - inter
iou = inter / union
return iou, union
def generalized_box_iou(boxes1, boxes2):
"""
Generalized IoU from https://giou.stanford.edu/. The boxes should be in [x0, y0, x1, y1] (corner) format.
Returns:
`torch.FloatTensor`: a [N, M] pairwise matrix, where N = len(boxes1) and M = len(boxes2)
"""
# degenerate boxes gives inf / nan results
# so do an early check
assert (boxes1[:, 2:] >= boxes1[:, :2]).all()
assert (boxes2[:, 2:] >= boxes2[:, :2]).all()
iou, union = box_iou(boxes1, boxes2)
lt = torch.min(boxes1[:, None, :2], boxes2[:, :2])
rb = torch.max(boxes1[:, None, 2:], boxes2[:, 2:])
wh = (rb - lt).clamp(min=0) # [N,M,2]
area = wh[:, :, 0] * wh[:, :, 1]
return iou - (area - union) / area
def center_to_corners_format(x):
"""
Converts a PyTorch tensor of bounding boxes of center format (center_x, center_y, width, height) to corners format
(x_0, y_0, x_1, y_1).
"""
x_c, y_c, w, h = x.unbind(-1)
b = [(x_c - 0.5 * w), (y_c - 0.5 * h), (x_c + 0.5 * w), (y_c + 0.5 * h)]
return torch.stack(b, dim=-1)
class DetrHungarianMatcher(nn.Module):
"""
This class computes an assignment between the targets and the predictions of the network.
For efficiency reasons, the targets don't include the no_object. Because of this, in general, there are more
predictions than targets. In this case, we do a 1-to-1 matching of the best predictions, while the others are
un-matched (and thus treated as non-objects).
Args:
class_cost:
The relative weight of the classification error in the matching cost.
bbox_cost:
The relative weight of the L1 error of the bounding box coordinates in the matching cost.
giou_cost:
The relative weight of the giou loss of the bounding box in the matching cost.
"""
def __init__(self, class_cost: float = 1, bbox_cost: float = 1, giou_cost: float = 1):
super().__init__()
requires_backends(self, ["scipy"])
self.class_cost = class_cost
self.bbox_cost = bbox_cost
self.giou_cost = giou_cost
if class_cost == 0 or bbox_cost == 0 or giou_cost == 0:
raise ValueError("All costs of the Matcher can't be 0")
@torch.no_grad()
def forward(self, outputs, targets):
"""
Args:
outputs (`dict`):
A dictionary that contains at least these entries:
* "logits": Tensor of dim [batch_size, num_queries, num_classes] with the classification logits
* "pred_boxes": Tensor of dim [batch_size, num_queries, 4] with the predicted box coordinates.
targets (`List[dict]`):
A list of targets (len(targets) = batch_size), where each target is a dict containing:
* "class_labels": Tensor of dim [num_target_boxes] (where num_target_boxes is the number of
ground-truth
objects in the target) containing the class labels
* "boxes": Tensor of dim [num_target_boxes, 4] containing the target box coordinates.
Returns:
`List[Tuple]`: A list of size `batch_size`, containing tuples of (index_i, index_j) where:
- index_i is the indices of the selected predictions (in order)
- index_j is the indices of the corresponding selected targets (in order)
For each batch element, it holds: len(index_i) = len(index_j) = min(num_queries, num_target_boxes)
"""
batch_size, num_queries = outputs["logits"].shape[:2]
# We flatten to compute the cost matrices in a batch
out_prob = outputs["logits"].flatten(0, 1).softmax(-1) # [batch_size * num_queries, num_classes]
out_bbox = outputs["pred_boxes"].flatten(0, 1) # [batch_size * num_queries, 4]
# Also concat the target labels and boxes
tgt_ids = torch.cat([v["class_labels"] for v in targets])
tgt_bbox = torch.cat([v["boxes"] for v in targets])
# Compute the classification cost. Contrary to the loss, we don't use the NLL,
# but approximate it in 1 - proba[target class].
# The 1 is a constant that doesn't change the matching, it can be ommitted.
class_cost = -out_prob[:, tgt_ids]
# Compute the L1 cost between boxes
bbox_cost = torch.cdist(out_bbox, tgt_bbox, p=1)
# Compute the giou cost between boxes
giou_cost = -generalized_box_iou(center_to_corners_format(out_bbox), center_to_corners_format(tgt_bbox))
# Final cost matrix
cost_matrix = self.bbox_cost * bbox_cost + self.class_cost * class_cost + self.giou_cost * giou_cost
cost_matrix = cost_matrix.view(batch_size, num_queries, -1).cpu()
sizes = [len(v["boxes"]) for v in targets]
indices = [linear_sum_assignment(c[i]) for i, c in enumerate(cost_matrix.split(sizes, -1))]
return [(torch.as_tensor(i, dtype=torch.int64), torch.as_tensor(j, dtype=torch.int64)) for i, j in indices]
def _max_by_axis(the_list):
# type: (List[List[int]]) -> List[int]
maxes = the_list[0]
for sublist in the_list[1:]:
for index, item in enumerate(sublist):
maxes[index] = max(maxes[index], item)
return maxes
class NestedTensor(object):
def __init__(self, tensors, mask: Optional[Tensor]):
self.tensors = tensors
self.mask = mask
def to(self, device):
cast_tensor = self.tensors.to(device)
mask = self.mask
if mask is not None:
cast_mask = mask.to(device)
else:
cast_mask = None
return NestedTensor(cast_tensor, cast_mask)
def decompose(self):
return self.tensors, self.mask
def __repr__(self):
return str(self.tensors)
def nested_tensor_from_tensor_list(tensor_list: List[Tensor]):
if tensor_list[0].ndim == 3:
max_size = _max_by_axis([list(img.shape) for img in tensor_list])
batch_shape = [len(tensor_list)] + max_size
b, c, h, w = batch_shape
dtype = tensor_list[0].dtype
device = tensor_list[0].device
tensor = torch.zeros(batch_shape, dtype=dtype, device=device)
mask = torch.ones((b, h, w), dtype=torch.bool, device=device)
for img, pad_img, m in zip(tensor_list, tensor, mask):
pad_img[: img.shape[0], : img.shape[1], : img.shape[2]].copy_(img)
m[: img.shape[1], : img.shape[2]] = False
else:
raise ValueError("Only 3-dimensional tensors are supported")
return NestedTensor(tensor, mask)
def sigmoid_focal_loss(inputs, targets, num_boxes, alpha: float = 0.25, gamma: float = 2):
"""
Loss used in RetinaNet for dense detection: https://arxiv.org/abs/1708.02002.
Args:
inputs: A float tensor of arbitrary shape.
The predictions for each example.
targets: A float tensor with the same shape as inputs. Stores the binary
classification label for each element in inputs (0 for the negative class and 1 for the positive
class).
alpha: (optional) Weighting factor in range (0,1) to balance
positive vs negative examples. Default = -1 (no weighting).
gamma: Exponent of the modulating factor (1 - p_t) to
balance easy vs hard examples.
Returns:
Loss tensor
"""
prob = inputs.sigmoid()
ce_loss = nn.functional.binary_cross_entropy_with_logits(inputs, targets, reduction="none")
p_t = prob * targets + (1 - prob) * (1 - targets)
loss = ce_loss * ((1 - p_t) ** gamma)
if alpha >= 0:
alpha_t = alpha * targets + (1 - alpha) * (1 - targets)
loss = alpha_t * loss
return loss.mean(1).sum() / num_boxes
def dice_loss(inputs, targets, num_boxes):
"""
Compute the DICE loss, similar to generalized IOU for masks
Args:
inputs: A float tensor of arbitrary shape.
The predictions for each example.
targets: A float tensor with the same shape as inputs. Stores the binary
classification label for each element in inputs (0 for the negative class and 1 for the positive
class).
"""
inputs = inputs.sigmoid()
inputs = inputs.flatten(1)
numerator = 2 * (inputs * targets).sum(1)
denominator = inputs.sum(-1) + targets.sum(-1)
loss = 1 - (numerator + 1) / (denominator + 1)
return loss.sum() / num_boxes
class DetrLoss(nn.Module):
"""
This class computes the losses for DetrForObjectDetection/DetrForSegmentation. The process happens in two steps: 1)
we compute hungarian assignment between ground truth boxes and the outputs of the model 2) we supervise each pair
of matched ground-truth / prediction (supervise class and box).
A note on the `num_classes` argument (copied from original repo in detr.py): "the naming of the `num_classes`
parameter of the criterion is somewhat misleading. It indeed corresponds to `max_obj_id` + 1, where `max_obj_id` is
the maximum id for a class in your dataset. For example, COCO has a `max_obj_id` of 90, so we pass `num_classes` to
be 91. As another example, for a dataset that has a single class with `id` 1, you should pass `num_classes` to be 2
(`max_obj_id` + 1). For more details on this, check the following discussion
https://github.com/facebookresearch/detr/issues/108#issuecomment-650269223"
Args:
matcher (`DetrHungarianMatcher`):
Module able to compute a matching between targets and proposals.
num_classes (`int`):
Number of object categories, omitting the special no-object category.
eos_coef (`float`):
Relative classification weight applied to the no-object category.
losses (`List[str]`):
List of all the losses to be applied. See `get_loss` for a list of all available losses.
"""
def __init__(self, matcher, num_classes, eos_coef, losses):
super().__init__()
self.matcher = matcher
self.num_classes = num_classes
self.eos_coef = eos_coef
self.losses = losses
empty_weight = torch.ones(self.num_classes + 1)
empty_weight[-1] = self.eos_coef
self.register_buffer("empty_weight", empty_weight)
# removed logging parameter, which was part of the original implementation
def loss_labels(self, outputs, targets, indices, num_boxes):
"""
Classification loss (NLL) targets dicts must contain the key "class_labels" containing a tensor of dim
[nb_target_boxes]
"""
if "logits" not in outputs:
raise KeyError("No logits were found in the outputs")
src_logits = outputs["logits"]
idx = self._get_src_permutation_idx(indices)
target_classes_o = torch.cat([t["class_labels"][J] for t, (_, J) in zip(targets, indices)])
target_classes = torch.full(
src_logits.shape[:2], self.num_classes, dtype=torch.int64, device=src_logits.device
)
target_classes[idx] = target_classes_o
loss_ce = nn.functional.cross_entropy(src_logits.transpose(1, 2), target_classes, self.empty_weight)
losses = {"loss_ce": loss_ce}
return losses
@torch.no_grad()
def loss_cardinality(self, outputs, targets, indices, num_boxes):
"""
Compute the cardinality error, i.e. the absolute error in the number of predicted non-empty boxes.
This is not really a loss, it is intended for logging purposes only. It doesn't propagate gradients.
"""
logits = outputs["logits"]
device = logits.device
tgt_lengths = torch.as_tensor([len(v["class_labels"]) for v in targets], device=device)
# Count the number of predictions that are NOT "no-object" (which is the last class)
card_pred = (logits.argmax(-1) != logits.shape[-1] - 1).sum(1)
card_err = nn.functional.l1_loss(card_pred.float(), tgt_lengths.float())
losses = {"cardinality_error": card_err}
return losses
def loss_boxes(self, outputs, targets, indices, num_boxes):
"""
Compute the losses related to the bounding boxes, the L1 regression loss and the GIoU loss.
Targets dicts must contain the key "boxes" containing a tensor of dim [nb_target_boxes, 4]. The target boxes
are expected in format (center_x, center_y, w, h), normalized by the image size.
"""
if "pred_boxes" not in outputs:
raise KeyError("No predicted boxes found in outputs")
idx = self._get_src_permutation_idx(indices)
src_boxes = outputs["pred_boxes"][idx]
target_boxes = torch.cat([t["boxes"][i] for t, (_, i) in zip(targets, indices)], dim=0)
loss_bbox = nn.functional.l1_loss(src_boxes, target_boxes, reduction="none")
losses = {}
losses["loss_bbox"] = loss_bbox.sum() / num_boxes
loss_giou = 1 - torch.diag(
generalized_box_iou(center_to_corners_format(src_boxes), center_to_corners_format(target_boxes))
)
losses["loss_giou"] = loss_giou.sum() / num_boxes
return losses
def loss_masks(self, outputs, targets, indices, num_boxes):
"""
Compute the losses related to the masks: the focal loss and the dice loss.
Targets dicts must contain the key "masks" containing a tensor of dim [nb_target_boxes, h, w].
"""
if "pred_masks" not in outputs:
raise KeyError("No predicted masks found in outputs")
src_idx = self._get_src_permutation_idx(indices)
tgt_idx = self._get_tgt_permutation_idx(indices)
src_masks = outputs["pred_masks"]
src_masks = src_masks[src_idx]
masks = [t["masks"] for t in targets]
# TODO use valid to mask invalid areas due to padding in loss
target_masks, valid = nested_tensor_from_tensor_list(masks).decompose()
target_masks = target_masks.to(src_masks)
target_masks = target_masks[tgt_idx]
# upsample predictions to the target size
src_masks = nn.functional.interpolate(
src_masks[:, None], size=target_masks.shape[-2:], mode="bilinear", align_corners=False
)
src_masks = src_masks[:, 0].flatten(1)
target_masks = target_masks.flatten(1)
target_masks = target_masks.view(src_masks.shape)
losses = {
"loss_mask": sigmoid_focal_loss(src_masks, target_masks, num_boxes),
"loss_dice": dice_loss(src_masks, target_masks, num_boxes),
}
return losses
def _get_src_permutation_idx(self, indices):
# permute predictions following indices
batch_idx = torch.cat([torch.full_like(src, i) for i, (src, _) in enumerate(indices)])
src_idx = torch.cat([src for (src, _) in indices])
return batch_idx, src_idx
def _get_tgt_permutation_idx(self, indices):
# permute targets following indices
batch_idx = torch.cat([torch.full_like(tgt, i) for i, (_, tgt) in enumerate(indices)])
tgt_idx = torch.cat([tgt for (_, tgt) in indices])
return batch_idx, tgt_idx
def get_loss(self, loss, outputs, targets, indices, num_boxes):
loss_map = {
"labels": self.loss_labels,
"cardinality": self.loss_cardinality,
"boxes": self.loss_boxes,
"masks": self.loss_masks,
}
if loss not in loss_map:
raise ValueError(f"Loss {loss} not supported")
return loss_map[loss](outputs, targets, indices, num_boxes)
def forward(self, outputs, targets):
"""
This performs the loss computation.
Args:
outputs (`dict`, *optional*):
Dictionary of tensors, see the output specification of the model for the format.
targets (`List[dict]`, *optional*):
List of dicts, such that len(targets) == batch_size. The expected keys in each dict depends on the
losses applied, see each loss' doc.
"""
outputs_without_aux = {k: v for k, v in outputs.items() if k != "auxiliary_outputs"}
# Retrieve the matching between the outputs of the last layer and the targets
indices = self.matcher(outputs_without_aux, targets)
# Compute the average number of target boxes accross all nodes, for normalization purposes
num_boxes = sum(len(t["class_labels"]) for t in targets)
num_boxes = torch.as_tensor([num_boxes], dtype=torch.float, device=next(iter(outputs.values())).device)
# (Niels): comment out function below, distributed training to be added
# if is_dist_avail_and_initialized():
# torch.distributed.all_reduce(num_boxes)
# (Niels) in original implementation, num_boxes is divided by get_world_size()
num_boxes = torch.clamp(num_boxes, min=1).item()
# Compute all the requested losses
losses = {}
for loss in self.losses:
losses.update(self.get_loss(loss, outputs, targets, indices, num_boxes))
# In case of auxiliary losses, we repeat this process with the output of each intermediate layer.
if "auxiliary_outputs" in outputs:
for i, auxiliary_outputs in enumerate(outputs["auxiliary_outputs"]):
indices = self.matcher(auxiliary_outputs, targets)
for loss in self.losses:
if loss == "masks":
# Intermediate masks losses are too costly to compute, we ignore them.
continue
l_dict = self.get_loss(loss, auxiliary_outputs, targets, indices, num_boxes)
l_dict = {k + f"_{i}": v for k, v in l_dict.items()}
losses.update(l_dict)
return losses
class_cost = 1
bbox_cost = 5
giou_cost = 2
matcher = DetrHungarianMatcher(
class_cost=class_cost, bbox_cost=bbox_cost, giou_cost=giou_cost
)
losses = ["labels", "boxes", "cardinality", "masks"]
num_labels = 250
eos_coefficient = 0.1
criterion = DetrLoss(
matcher=matcher,
num_classes=num_labels,
eos_coef=eos_coefficient,
losses=losses,
)
criterion.to("cuda")
# Third: compute the losses, based on outputs and labels
from model_from_huggingface import *
for idx, batch in enumerate(train_dataloader):
pixel_values = batch["pixel_values"].to("cuda")
pixel_mask = batch["pixel_mask"].to("cuda")
labels = [{k: v.to("cuda") for k, v in t.items()} for t in batch["labels"]]
outputs = model(pixel_values=pixel_values, pixel_mask=pixel_mask, labels=labels)
outputs_loss = {}
outputs_loss["logits"] = outputs.logits
outputs_loss["pred_boxes"] = outputs.pred_boxes
outputs_loss["pred_masks"] = outputs.pred_masks
loss_dict = criterion(outputs_loss, labels)
# Fourth: compute total loss, as a weighted sum of the various losses
bbox_loss_coefficient = 5
giou_loss_coefficient = 2
mask_loss_coefficient = 1
dice_loss_coefficient = 1
weight_dict = {"loss_ce": 1, "loss_bbox": bbox_loss_coefficient}
weight_dict["loss_giou"] = giou_loss_coefficient
weight_dict["loss_mask"] = mask_loss_coefficient
weight_dict["loss_dice"] = dice_loss_coefficient
loss = sum(loss_dict[k] * weight_dict[k] for k in loss_dict.keys() if k in weight_dict)
print(loss)
下面解释一下运行其中的变量
indices是query和target进行匈牙利匹配后的结果

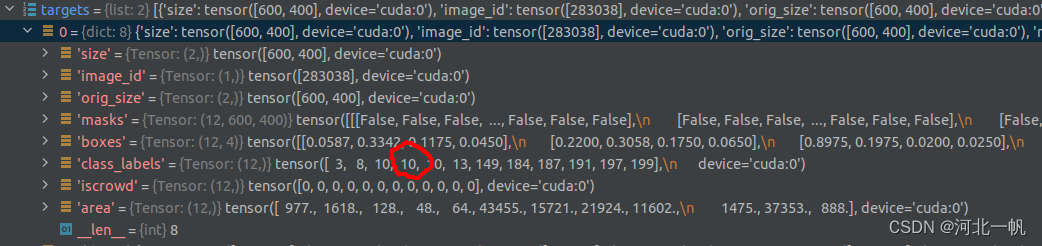
也就是说,第5个query去匹配class_labels中的10