本科课程实验报告,有太多公式和图片了,干脆直接转成图片了
仅分享和记录,不保证全对
使用matlab中的simulink进行仿真
实验内容
线性连续控制系统的数字仿真
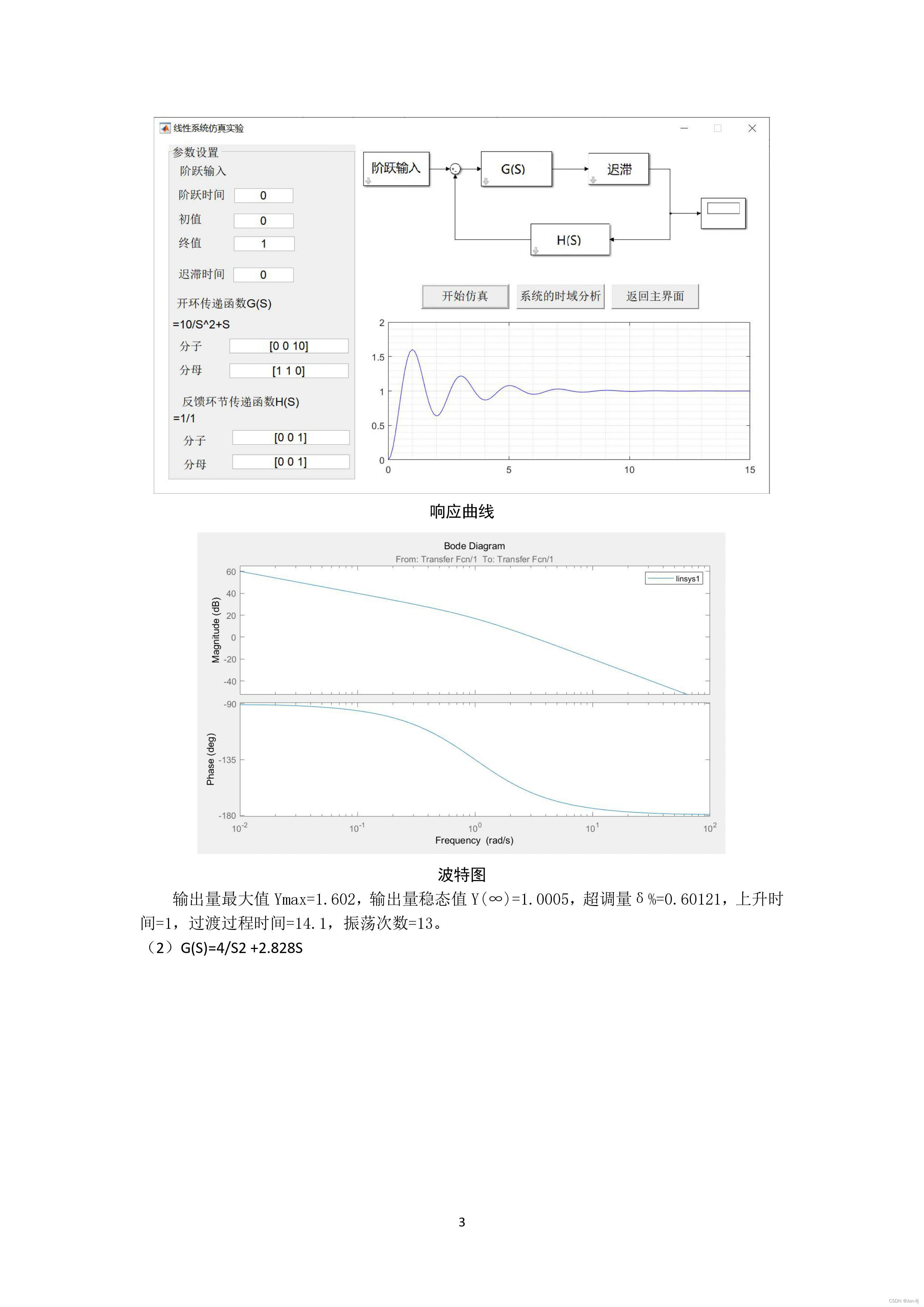
根据开环传递函数G(S)的不同,完成两个线性连续控制系统的仿真。
参数设置:
1.输入阶跃信号:阶跃时间:0;初值:0;终值:1
2.迟滞环节:迟滞时间:0
3.开环传递函数:G(S)=10/S(S+1) 、G(S)=4/S2 +2.828S
4.反馈环节传递函数:H(S)=1
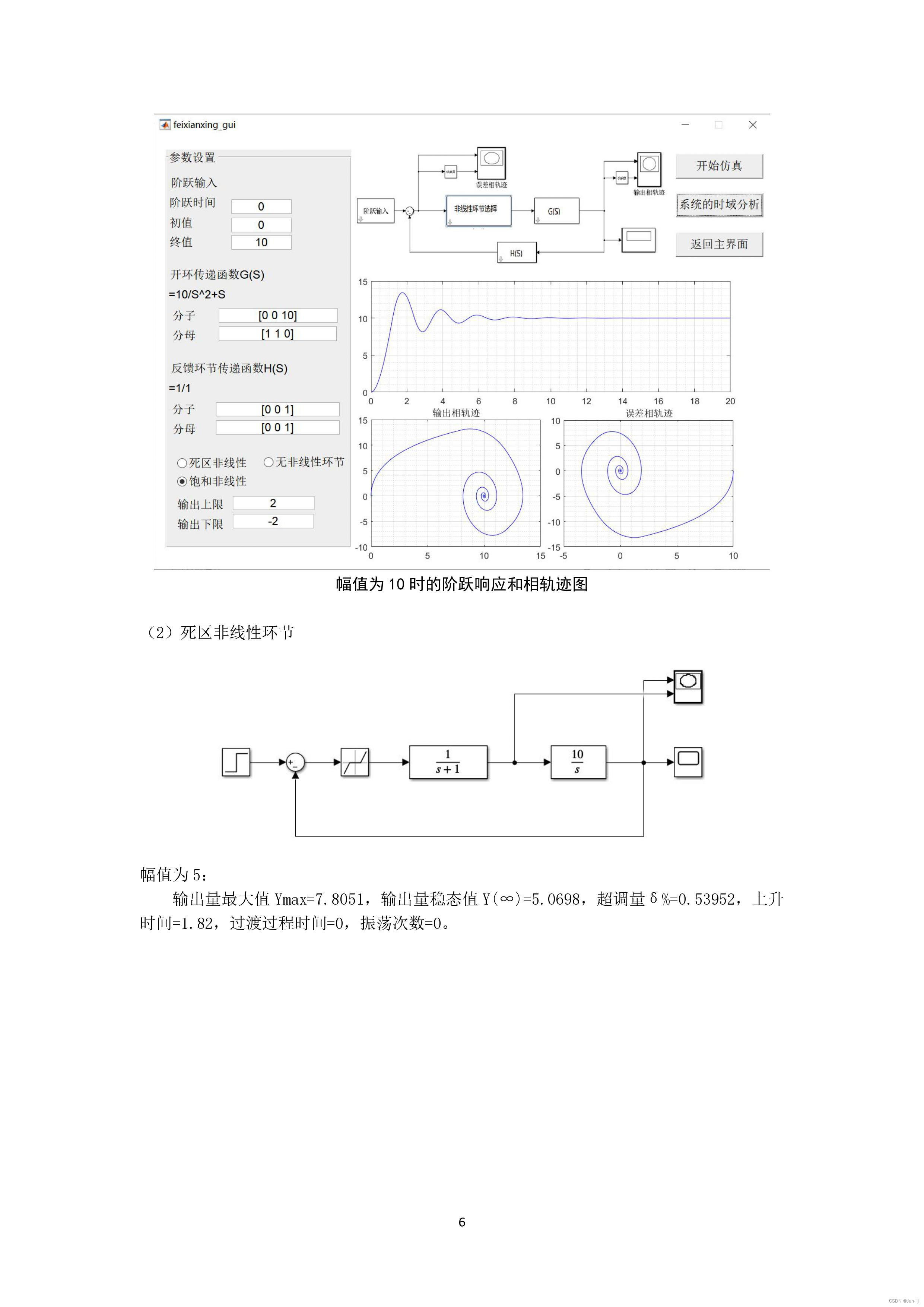
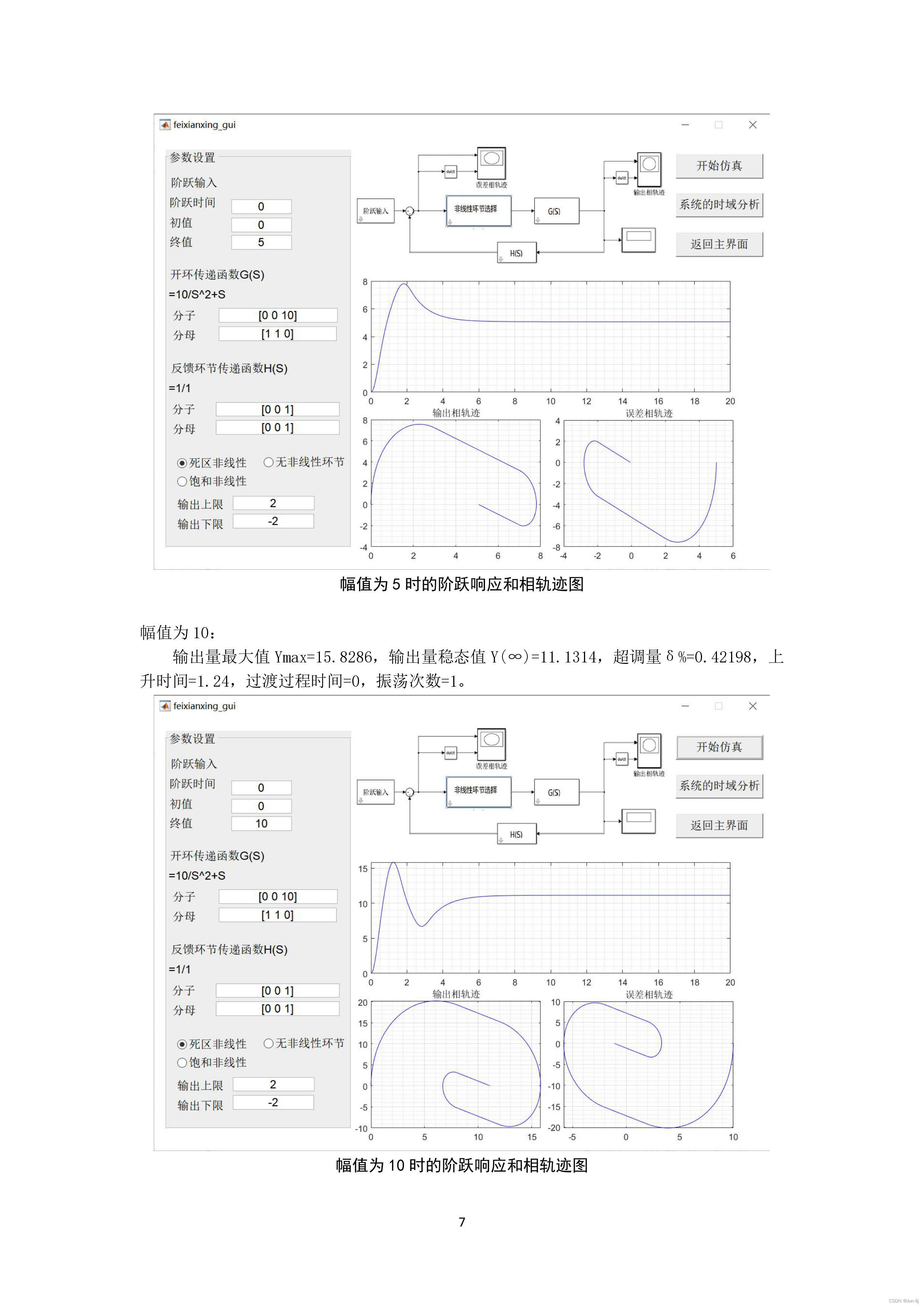
非线性环节控制系统的数字仿真
Wk(s)=10/s(s+1),仿真饱和+死区的阶跃响应,饱和或死区的非线性的上下限(-2,2),幅值为5和10,记录相轨迹曲线4条。
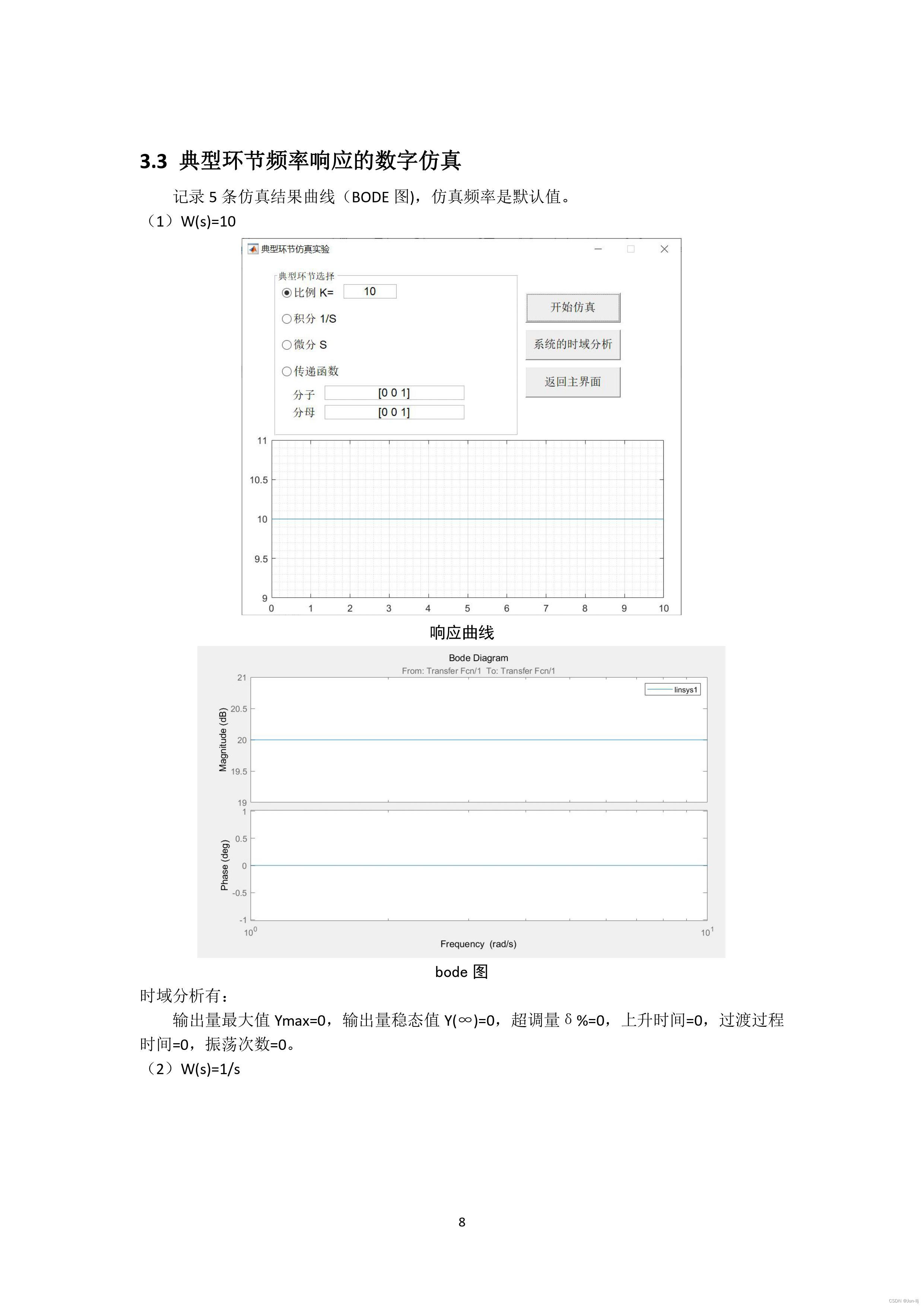
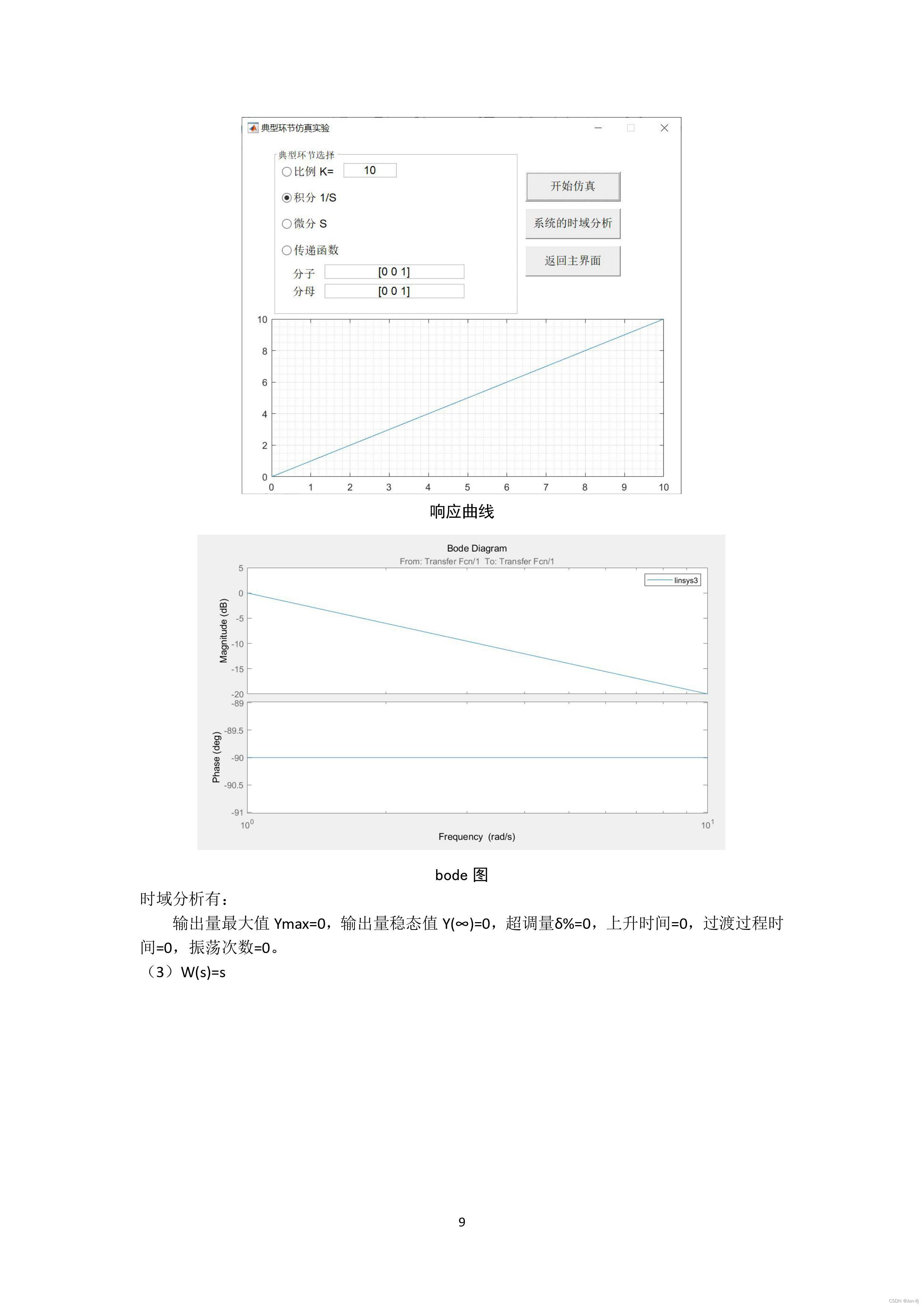
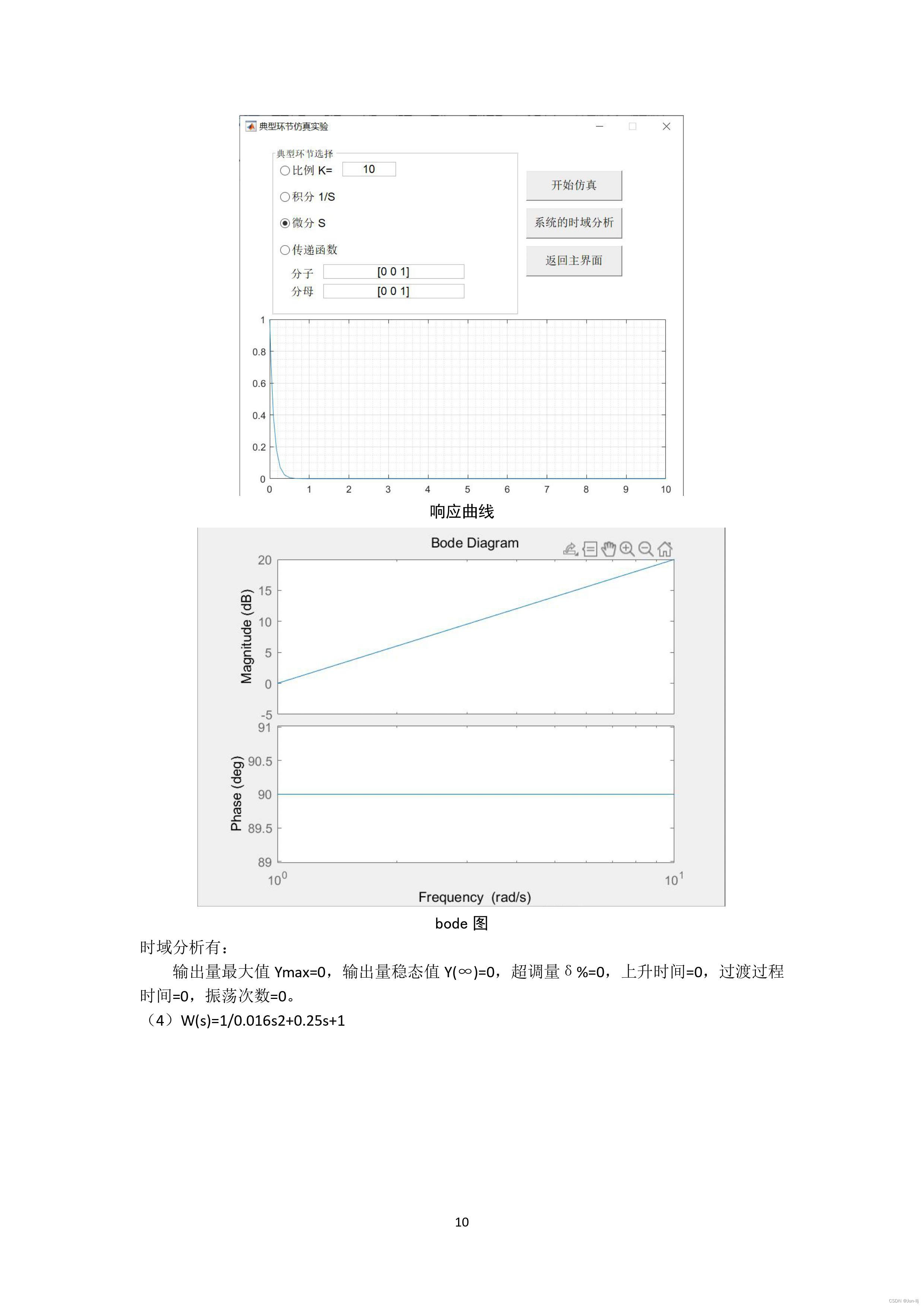
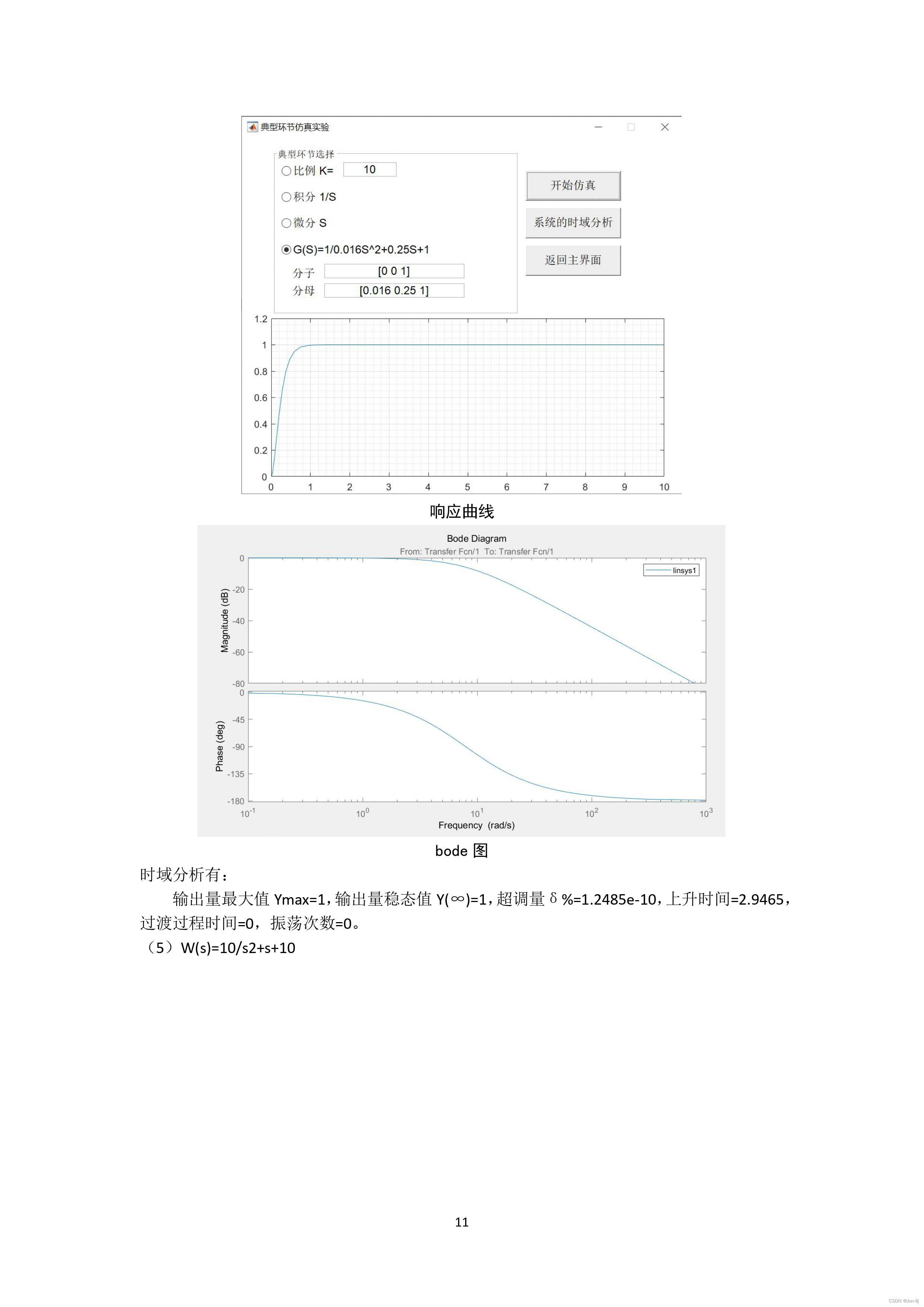
典型环节频率响应的数字仿真
记录5条仿真结果曲线(BODE图),仿真频率是默认值。