【STM32】HAL库的STOP低功耗模式UART串口唤醒,解决首字节出错的问题(全网第一解决方案)
前文:
【STM32】HAL库的STOP低功耗模式UART串口唤醒,第一个接收字节出错的问题(疑难杂症)
目前已解决 并更新了我的gitee库:
基于HAL库建立自己的低功耗模式配置库(STM32L4系列低功耗所有配置汇总)
文章目录
- 最初的串口唤醒配置
- 首字节出错的问题
- 解决后的流程及代码
- 为什么说是“全网第一”
- 附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
- SysTick系统定时器精准延时
- 延时函数
- 阻塞延时
- 非阻塞延时
- 位带操作
- 位带代码
- 位带宏定义
- 总线函数
- 一、位带操作理论及实践
- 二、如何判断MCU的外设是否支持位带
最初的串口唤醒配置
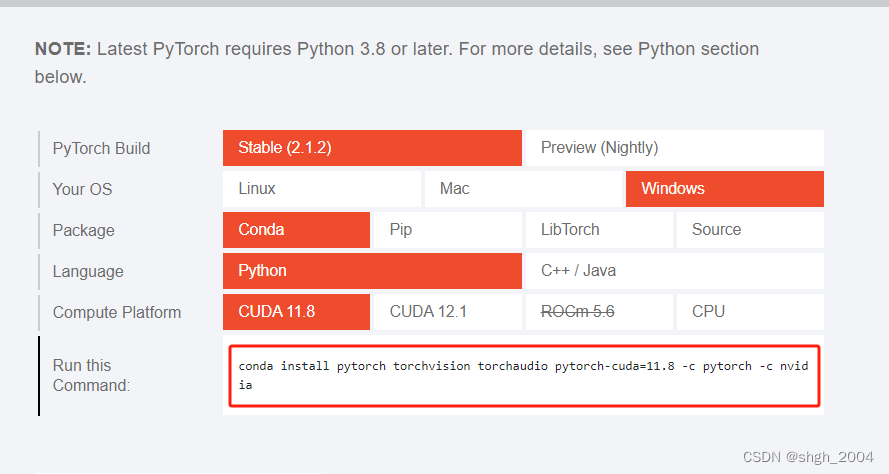
在最初的串口唤醒配置中 我是用的如下配置(现已更新):
【STM32】HAL库低功耗STOP停止模式的串口唤醒(解决进入以后立马唤醒、串口唤醒和回调无法一起使用、接收数据不全、首字节错误的问题)
进入和退出函数为:
/*!
* @brief 配置串口在停止模式下的唤醒
*
* @param [in] huart: UART_HandleTypeDef类型的器件
* [in] EnableNotDisable: 使能或者关闭
*
* @return None
*/
void Ctrl_UART_StopMode_WakeUp(UART_HandleTypeDef *huart,bool EnableNotDisable)
{
if(EnableNotDisable)
{
__HAL_RCC_WAKEUPSTOP_CLK_CONFIG(RCC_STOP_WAKEUPCLOCK_HSI); //保留唤醒用的HSI线 串口初始化时钟也必须要配置为HSI
UART_WakeUpTypeDef UART_WakeUpStruct={0};
UART_WakeUpStruct.WakeUpEvent=UART_WAKEUP_ON_READDATA_NONEMPTY; //接收数据不为空时唤醒
HAL_UARTEx_StopModeWakeUpSourceConfig(huart,UART_WakeUpStruct);
__HAL_UART_ENABLE_IT(huart,UART_IT_WUF); //开启唤醒中断
HAL_UARTEx_EnableStopMode(huart); //开启模式
}
else
{
__HAL_UART_DISABLE_IT(huart,UART_IT_WUF); //关闭唤醒中断
HAL_UARTEx_DisableStopMode(huart); //关闭模式
}
}
在唤醒后 我将时钟初始化等 放到了唤醒回调中 导致长数据中间丢数据
于是进行改进 就是把初始化等退出以后的函数放到主线程 低功耗函数之后 就能完美解决这个问题
在进入低功耗模式之前的流程为:
- 保留HSI线(系统RCC中的宏函数,其他用到HSI时钟唤醒的外设也建议进行此步骤,这里串口也必须要用这条时钟线)
- 配置串口唤醒方式
- 开启串口唤醒中断(可以不开)
- 开启串口唤醒功能
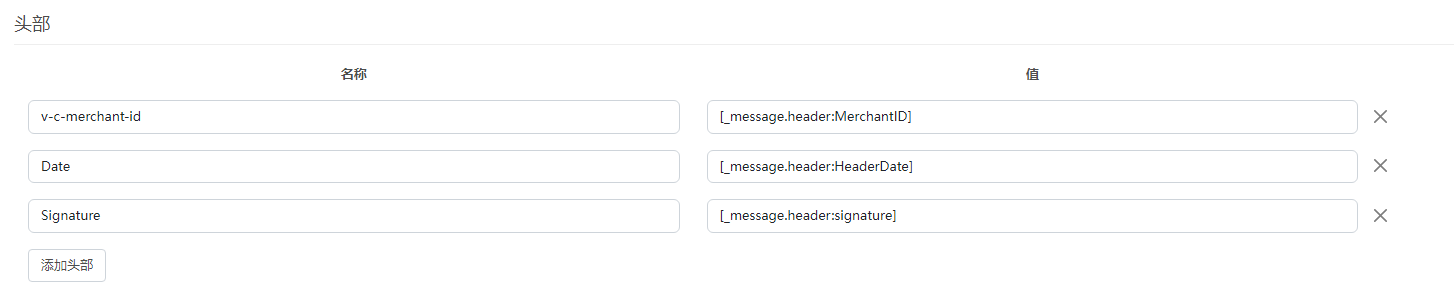
其中 开启串口唤醒功能就是将此寄存器置1

当然 这里的串口唤醒是抄的网上的代码和流程 教程很多 我就不叙述了

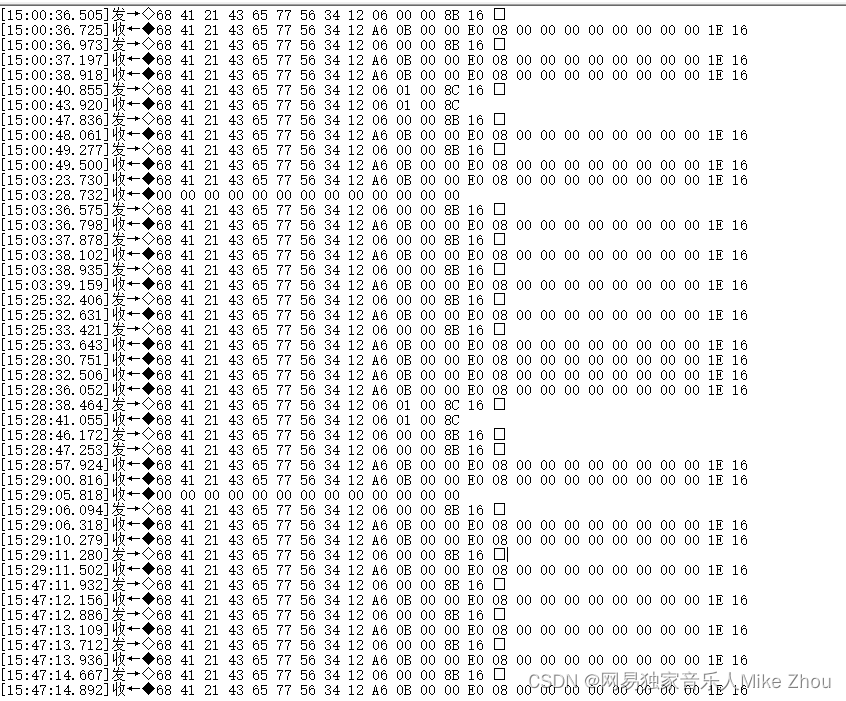
不过最后我发现在高速UART波特率的情况下 首唤醒字节仍然会丢失
且无论怎么改 都会出现此问题
具体调试和BUG复现过程:
【STM32】HAL库的STOP低功耗模式UART串口唤醒,第一个接收字节出错的问题(疑难杂症)
首字节出错的问题
经过前文的调试 首字节在出错时 是将采样后移了一位 发送AA 接收到55
也就是发送1010 1010 接收到0101 0101
所以我猜想应该是时钟的问题
进入低功耗需要时间 同样 唤醒也需要时间 所以可能就是这么点时间导致CPU延迟采样 所以串口接收不准
同样 在进入低功耗后 可以看到电流也是缓慢下降的 而采用jlink烧录后 实际上功耗下不来(大个1ma左右) 推测应该是jlink的信号复位保持了某些寄存器不清零(毕竟jlink和复位也算中断的一种)
这个问题困扰我好几天 我心中知道一定是时钟的问题 但一直没办法解决
直到我开发STM32L4R系列时 发现一个寄存器如L496不同:
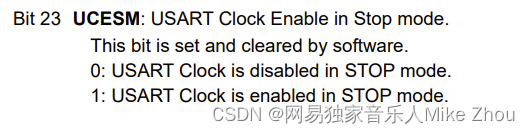
也就是CR3的第23位
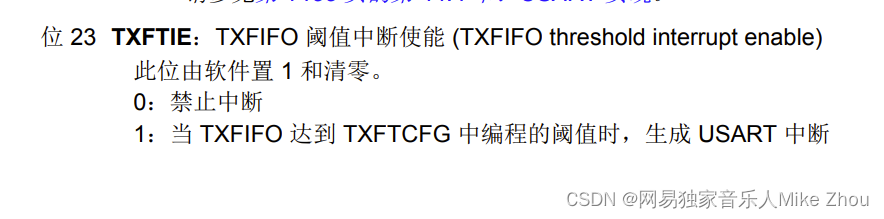
起初 我以为是芯片手册版本的问题 直到我查看SDK发现真的如此
有个操作函数HAL_UARTEx_EnableClockStopMode长这样:
#if defined(USART_CR3_UCESM)
/**
* @brief Keep UART Clock enabled when in Stop Mode.
* @note When the USART clock source is configured to be LSE or HSI, it is possible to keep enabled
* this clock during STOP mode by setting the UCESM bit in USART_CR3 control register.
* @note When LPUART is used to wakeup from stop with LSE is selected as LPUART clock source,
* and desired baud rate is 9600 baud, the bit UCESM bit in LPUART_CR3 control register must be set.
* @param huart UART handle.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_UARTEx_EnableClockStopMode(UART_HandleTypeDef *huart)
{
/* Process Locked */
__HAL_LOCK(huart);
/* Set UCESM bit */
SET_BIT(huart->Instance->CR3, USART_CR3_UCESM);
/* Process Unlocked */
__HAL_UNLOCK(huart);
return HAL_OK;
}
而部分芯片是没有USART_CR3_UCESM这一位的
#define USART_CR3_UCESM_Pos (23U)
#define USART_CR3_UCESM_Msk (0x1UL << USART_CR3_UCESM_Pos) /*!< 0x02000000 */
#define USART_CR3_UCESM USART_CR3_UCESM_Msk /*!< USART Clock enable in Stop mode */
这个函数位于uart_ex中
注释里面说明了 要保证在低功耗时 保持时钟 所以要用到的这个函数
另外 采用LPUART时 如果波特率在9600之上 这一位需要置1
而函数HAL_UARTEx_EnableStopMode只对USART_CR1_UESM进行了操作
此寄存器是通用的 并且SDK中的函数也是通用的
/**
* @brief Enable UART Stop Mode.
* @note The UART is able to wake up the MCU from Stop 1 mode as long as UART clock is HSI or LSE.
* @param huart UART handle.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_UARTEx_EnableStopMode(UART_HandleTypeDef *huart)
{
/* Process Locked */
__HAL_LOCK(huart);
/* Set UESM bit */
SET_BIT(huart->Instance->CR1, USART_CR1_UESM);
/* Process Unlocked */
__HAL_UNLOCK(huart);
return HAL_OK;
}
所以 我就把函数HAL_UARTEx_EnableClockStopMode添加到了进入低功耗之前
然后就解决了BUG 停止模式下的BUG再也没出错
解决后的流程及代码
最后的串口唤醒配置流程就改为:
- 保留HSI线(系统RCC中的宏函数,其他用到HSI时钟唤醒的外设也建议进行此步骤,这里串口也必须要用这条时钟线)
- 配置串口唤醒方式
- 开启串口唤醒中断(可以不开)
- 开启串口STOP模式时钟 开启串口唤醒功能
代码:
/*!
* @brief 配置串口在停止模式下的唤醒
*
* @param [in] huart: UART_HandleTypeDef类型的器件
* [in] EnableNotDisable: 使能或者关闭
*
* @return None
*/
void Ctrl_UART_StopMode_WakeUp(UART_HandleTypeDef *huart,bool EnableNotDisable)
{
if(EnableNotDisable)
{
__HAL_RCC_WAKEUPSTOP_CLK_CONFIG(RCC_STOP_WAKEUPCLOCK_HSI); //保留唤醒用的HSI线 串口初始化时钟也必须要配置为HSI
UART_WakeUpTypeDef UART_WakeUpStruct={0};
UART_WakeUpStruct.WakeUpEvent=UART_WAKEUP_ON_READDATA_NONEMPTY; //接收数据不为空时唤醒
HAL_UARTEx_StopModeWakeUpSourceConfig(huart,UART_WakeUpStruct);
__HAL_UART_ENABLE_IT(huart,UART_IT_WUF); //开启唤醒中断
HAL_UARTEx_EnableClockStopMode(huart);
HAL_UARTEx_EnableStopMode(huart); //开启模式
}
else
{
__HAL_UART_DISABLE_IT(huart,UART_IT_WUF); //关闭唤醒中断
HAL_UARTEx_DisableClockStopMode(huart);
HAL_UARTEx_DisableStopMode(huart); //关闭模式
}
}
其中 第一步的保留HSI时钟线 也就是RCC中的宏函数 这一步我在测试后发现 如果使用了HAL_UARTEx_EnableClockStopMode函数 则不需要进行第一步 但是串口所使用的时钟还是要配置为HSI线
为什么说是“全网第一”
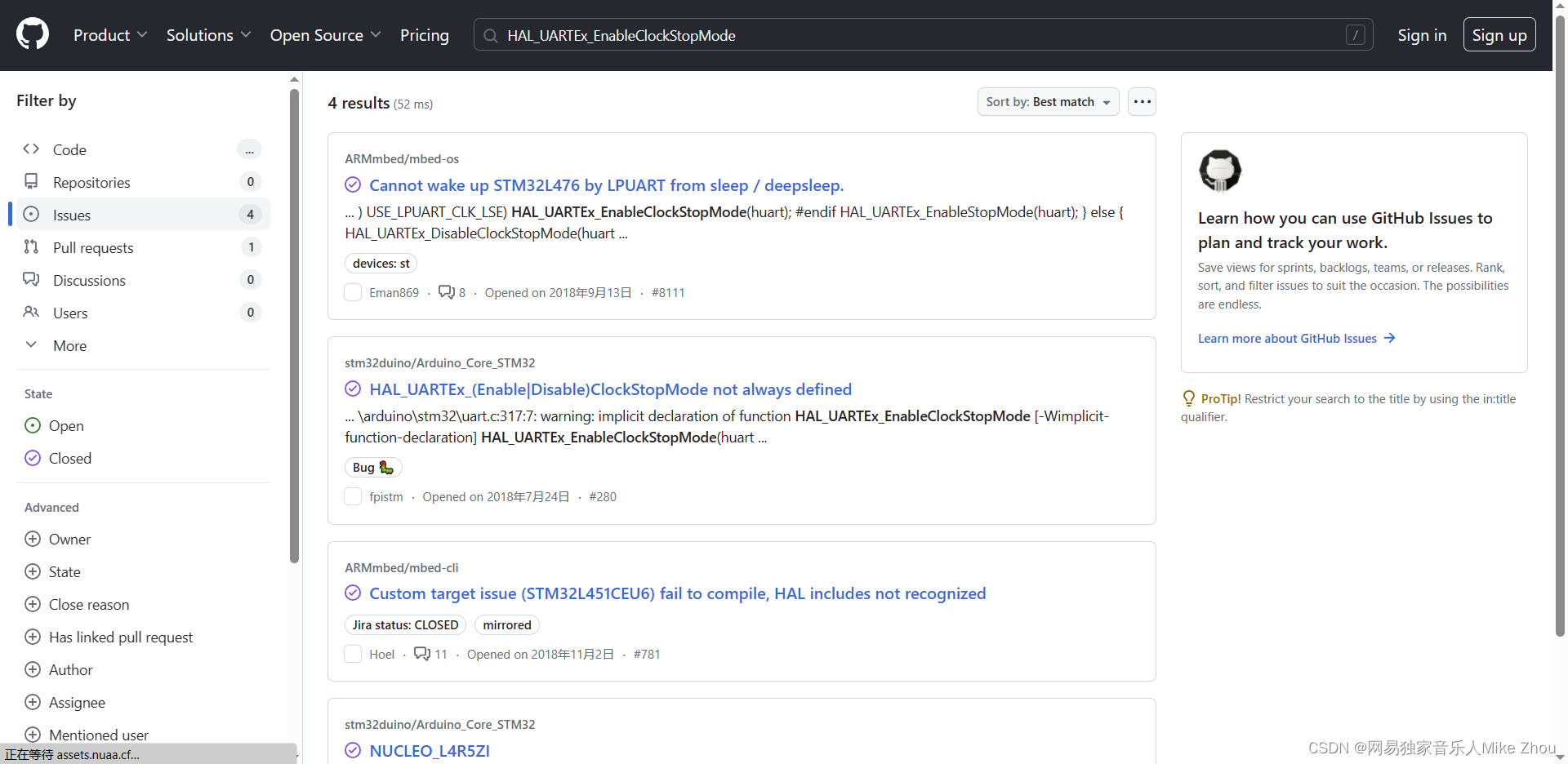
最后 我在网上搜素HAL_UARTEx_EnableClockStopMode函数
发现国内无论是CSDN还是百度都搜不到


只有GitHub上寥寥无几的几个搜素结果 并且都是与LPUART有关的(虽然这个与UART配置流程和函数基本一样)
附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
SysTick系统定时器精准延时
延时函数
SysTick->LOAD中的值为计数值
计算方法为工作频率值/分频值
比如工作频率/1000 则周期为1ms
以ADuCM4050为例:
#include "ADuCM4050.h"
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 26000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器
while(ms--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 26000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器
while(us--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
其中的52000000表示芯片的系统定时器频率 32系列一般为外部定时器频率的两倍
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while(ms--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while(us--)
{
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
}
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
非阻塞延时
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{
SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{
SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数
SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记
SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器
//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待
//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
位带操作
位带代码
M3、M4架构的单片机 其输出口地址为端口地址+20 输入为+16
M0架构的单片机 其输出口地址为端口地址+12 输入为+8
以ADuCM4050为列:
位带宏定义
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010
#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050
#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090
#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0
#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) //输出
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) //输入
#define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) //输出
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) //输入
#define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) //输出
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) //输入
#define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) //输出
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) //输入
#define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)
#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)
void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);
void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);
void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);
void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);
void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);
#endif
总线函数
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"
void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{
switch(port)
{
case 0:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 1:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 2:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 3:{
switch(pin)
{
case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
default:port=0;break;
}
}
void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num最大为0xffff
{
int i;
for(i=0;i<16;i++)
{
GPIO_OUT(port,i,(num>>i)&0x0001);
}
}
void P0_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P0_O(i)=(num>>i)&0x0001;
}
}
unsigned int P0_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P0_I(i)<<i)&0xFFFF;
}
return num;
}
void P1_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P1_O(i)=(num>>i)&0x0001;
}
}
unsigned int P1_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P1_I(i)<<i)&0xFFFF;
}
return num;
}
void P2_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P2_O(i)=(num>>i)&0x0001;
}
}
unsigned int P2_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P2_I(i)<<i)&0xFFFF;
}
return num;
}
void P3_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P3_O(i)=(num>>i)&0x0001;
}
}
unsigned int P3_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P3_I(i)<<i)&0xFFFF;
}
return num;
}
一、位带操作理论及实践
位带操作的概念其实30年前就有了,那还是 CM3 将此能力进化,这里的位带操作是 8051 位寻址区的威力大幅加强版
位带区: 支持位带操作的地址区
位带别名: 对别名地址的访问最终作 用到位带区的访问上(注意:这中途有一个 地址映射过程)
位带操作对于硬件 I/O 密集型的底层程序最有用处
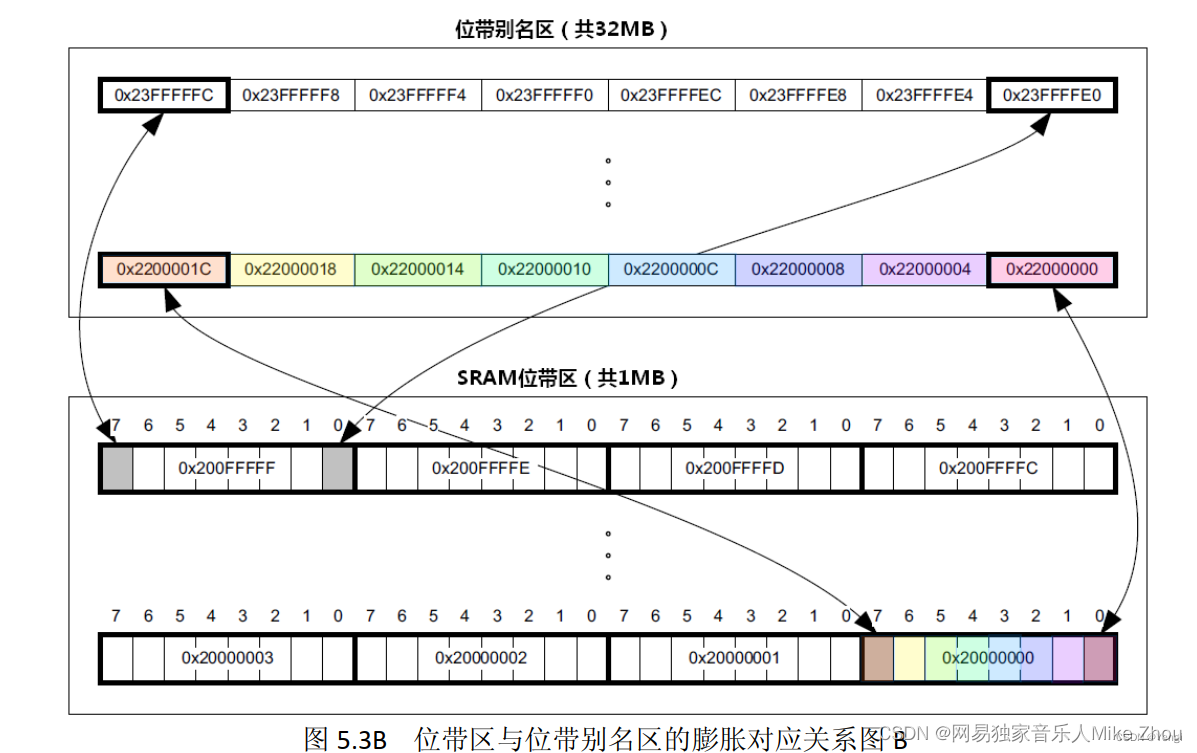
支持了位带操作后,可以使用普通的加载/存储指令来对单一的比特进行读写。在CM4中,有两个区中实现了位带。其中一个是SRAM区的最低1MB范围,第二个则是片内外设区的最低1MB范围。这两个区中的地址除了可以像普通的RAM一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个32位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。
位操作就是可以单独的对一个比特位读和写,类似与51中sbit定义的变量,stm32中通过访问位带别名区来实现位操作的功能
STM32中有两个地方实现了位带,一个是SRAM,一个是片上外设。
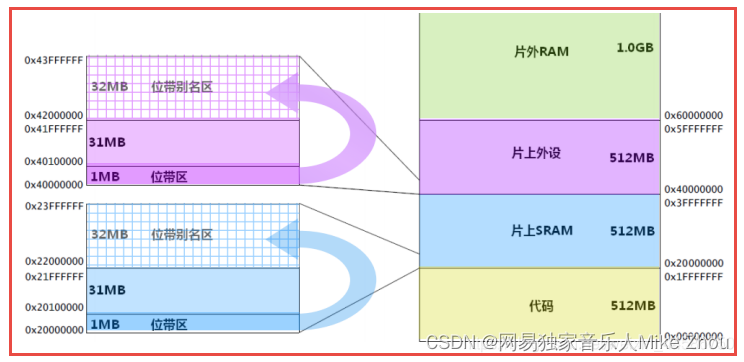
(1)位带本质上是一块地址区(例如每一位地址位对应一个寄存器)映射到另一片地址区(实现每一位地址位对应一个寄存器中的一位),该区域就叫做位带别名区,将每一位膨胀成一个32位的字。
(2)位带区的4个字节对应实际寄存器或内存区的一个位,虽然变大到4个字节,但实际上只有最低位有效(代表0或1)
只有位带可以直接用=赋值的方式来操作寄存器 位带是把寄存器上的每一位 膨胀到32位 映射到位带区 比如0x4002 0000地址的第0个bit 映射到位带区的0地址 那么其对应的位带映射地址为0x00 - 0x04 一共32位 但只有LSB有效 采用位带的方式用=赋值时 就是把位带区对应的LSB赋值 然后MCU再转到寄存器对应的位里面 寄存器操作时 如果不改变其他位上面的值 那就只能通过&=或者|=的方式进行
要设置0x2000 0000这个字节的第二个位bit2为1,使用位带操作的步骤有:
1、将1写入位 带别名区对应的映射地址(即0x22000008,因为1bit对应4个byte);
2、将0x2000 0000的值 读取到内部的缓冲区(这一步骤是内核完成的,属于原子操作,不需要用户操作);
3、将bit2置1,再把值写 回到0x2000 0000(属于原子操作,不需要用户操作)。
关于GPIO引脚对应的访问地址,可以参考以下公式
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
如:端口F访问的起始地址GPIOF_BASE
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)
但好在官方库里面都帮我们定义好了 只需要在BASE地址加上便宜即可
例如:
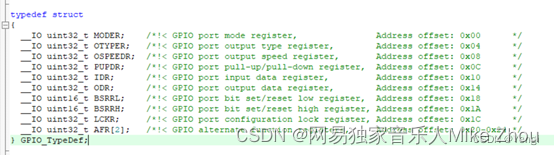
GPIOF的ODR寄存器的地址 = GPIOF_BASE + 0x14
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
设置PF9引脚的话:
uint32_t *PF9_BitBand =
*(uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR– 0x40000000) *32 + 9*4)
封装一下:
#define PFout(x) *(volatile uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR – 0x40000000) *32 + x*4)
现在 可以把通用部分封装成一个小定义:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
那么 设置PF引脚的函数可以定义:
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
若使PF9输入输出则:
PF_O(9)=1; //输出高电平
uint8_t dat = PF_I(9); //获取PF9引脚的值
总线输入输出:
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PF_O(i)=(num>>i)&0x0001;
}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PF_I(i)<<i)&0xFFFF;
}
return num;
}
STM32的可用下面的函数:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "stm32l496xx.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
#define PA_O(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PA_I(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PB_O(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PB_I(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PC_O(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PC_I(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PD_O(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PD_I(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PE_O(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PE_I(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PG_O(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PG_I(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PH_O(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PH_I(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PI_O(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PI_I(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
void PA_BUS_O(unsigned int num);
unsigned int PA_BUS_I(void);
void PB_BUS_O(unsigned int num);
unsigned int PB_BUS_I(void);
void PC_BUS_O(unsigned int num);
unsigned int PC_BUS_I(void);
void PD_BUS_O(unsigned int num);
unsigned int PD_BUS_I(void);
void PE_BUS_O(unsigned int num);
unsigned int PE_BUS_I(void);
void PF_BUS_O(unsigned int num);
unsigned int PF_BUS_I(void);
void PG_BUS_O(unsigned int num);
unsigned int PG_BUS_I(void);
void PH_BUS_O(unsigned int num);
unsigned int PH_BUS_I(void);
void PI_BUS_O(unsigned int num);
unsigned int PI_BUS_I(void);
#endif
#include "GPIO.h"
void PA_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PA_O(i)=(num>>i)&0x0001;
}
}
unsigned int PA_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PA_I(i)<<i)&0xFFFF;
}
return num;
}
void PB_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PB_O(i)=(num>>i)&0x0001;
}
}
unsigned int PB_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PB_I(i)<<i)&0xFFFF;
}
return num;
}
void PC_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PC_O(i)=(num>>i)&0x0001;
}
}
unsigned int PC_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PC_I(i)<<i)&0xFFFF;
}
return num;
}
void PD_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PD_O(i)=(num>>i)&0x0001;
}
}
unsigned int PD_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PD_I(i)<<i)&0xFFFF;
}
return num;
}
void PE_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PE_O(i)=(num>>i)&0x0001;
}
}
unsigned int PE_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PE_I(i)<<i)&0xFFFF;
}
return num;
}
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PF_O(i)=(num>>i)&0x0001;
}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PF_I(i)<<i)&0xFFFF;
}
return num;
}
void PG_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PG_O(i)=(num>>i)&0x0001;
}
}
unsigned int PG_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PG_I(i)<<i)&0xFFFF;
}
return num;
}
void PH_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PH_O(i)=(num>>i)&0x0001;
}
}
unsigned int PH_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PH_I(i)<<i)&0xFFFF;
}
return num;
}
void PI_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{
int i;
for(i=0;i<16;i++)
{
PI_O(i)=(num>>i)&0x0001;
}
}
unsigned int PI_BUS_I(void) //输出值num最大为0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(PI_I(i)<<i)&0xFFFF;
}
return num;
}
二、如何判断MCU的外设是否支持位带
根据《ARM Cortex-M3与Cortex-M4权威指南(第3版)》中第6章第7节描述
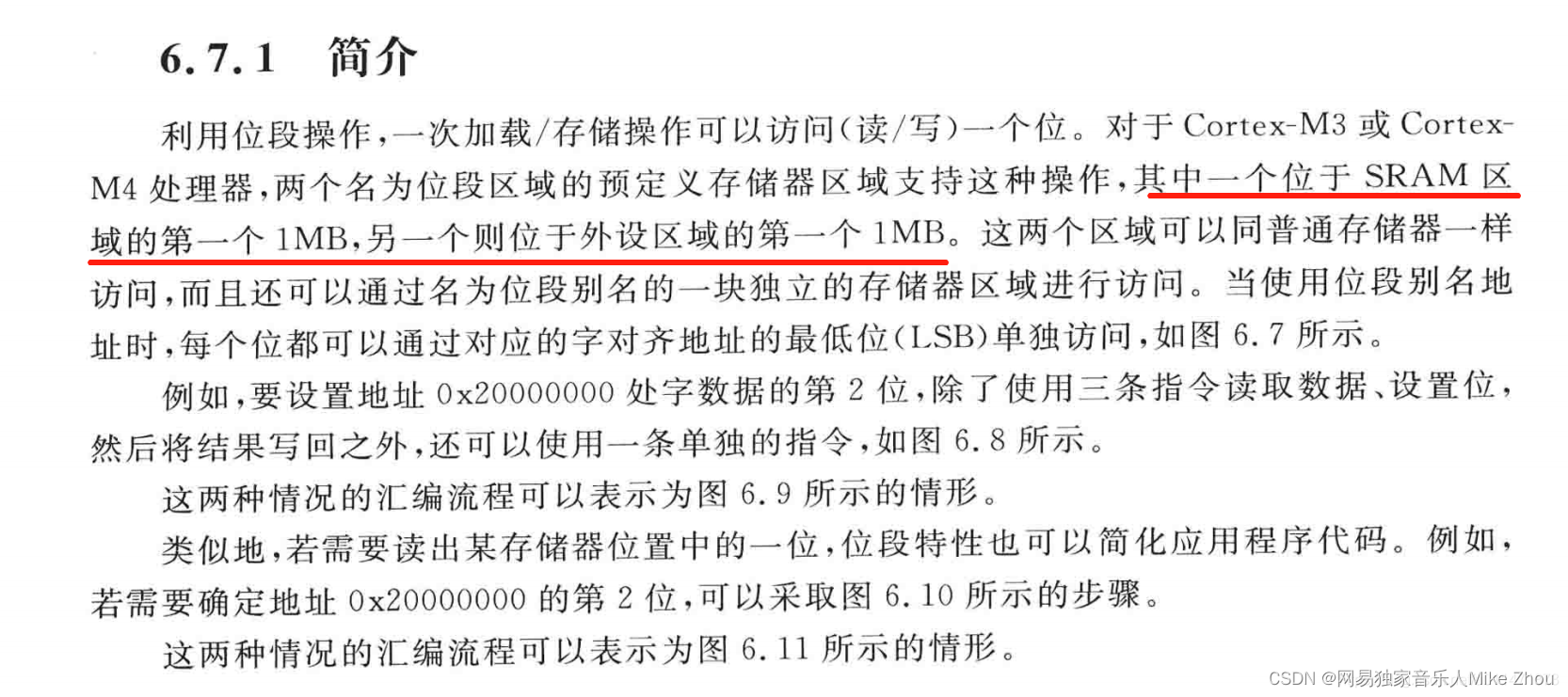
也就是说 要实现对GPIO的位带操作 必须保证GPIO位于外设区域的第一个1MB中
第一个1MB应该是0x4010 0000之前 位带不是直接操作地址 而是操作地址映射 地址映射被操作以后 MCU自动会修改对应寄存器的值
位带区只有1MB 所以只能改0x4000 0000 - 0x400F FFFF的寄存器
像F4系列 GPIO的首地址为0x4002 0000 就可以用位带来更改
STM32L476的GPIO就不行:
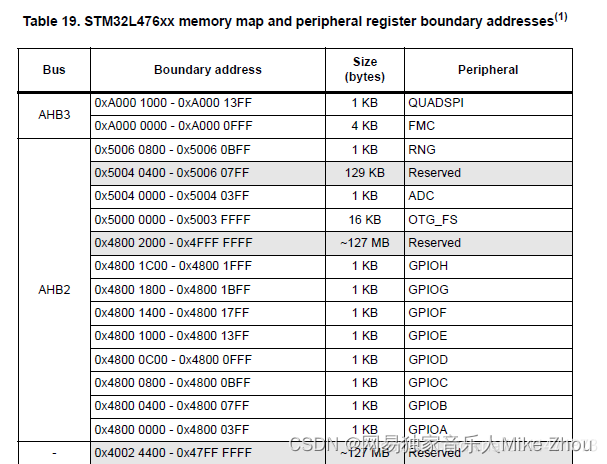
AHB2的都不能用位带
ABP 还有AHB1都可以用
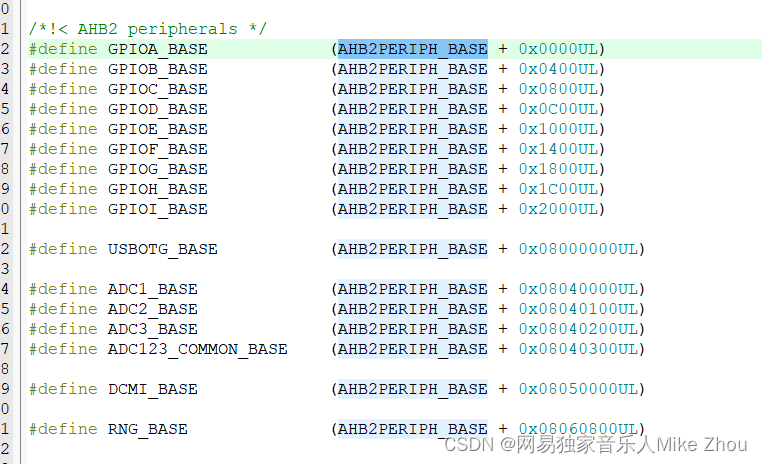
但是L476的寄存器里面 GPIO和ADC都是AHB2