对于指针式仪表的识别与读数,可以通过以下步骤使用OpenCV实现:
-
读取图像:使用
cv2.imread()函数读取要处理的仪表图像。

-
灰度转换:使用
cv2.cvtColor()函数将彩色图像转换为灰度图像。这是因为灰度图像只有一个通道,便于后续的处理。 -
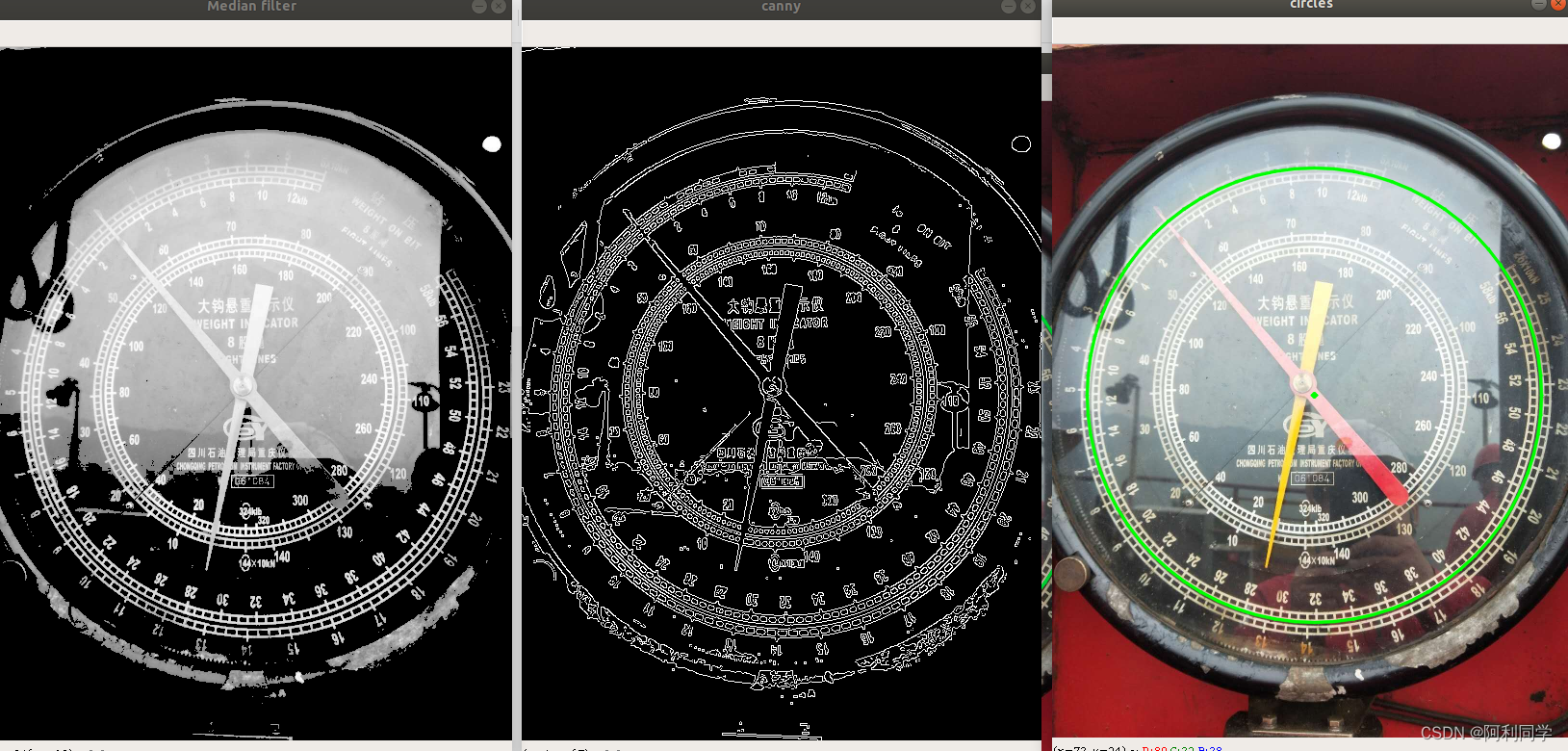
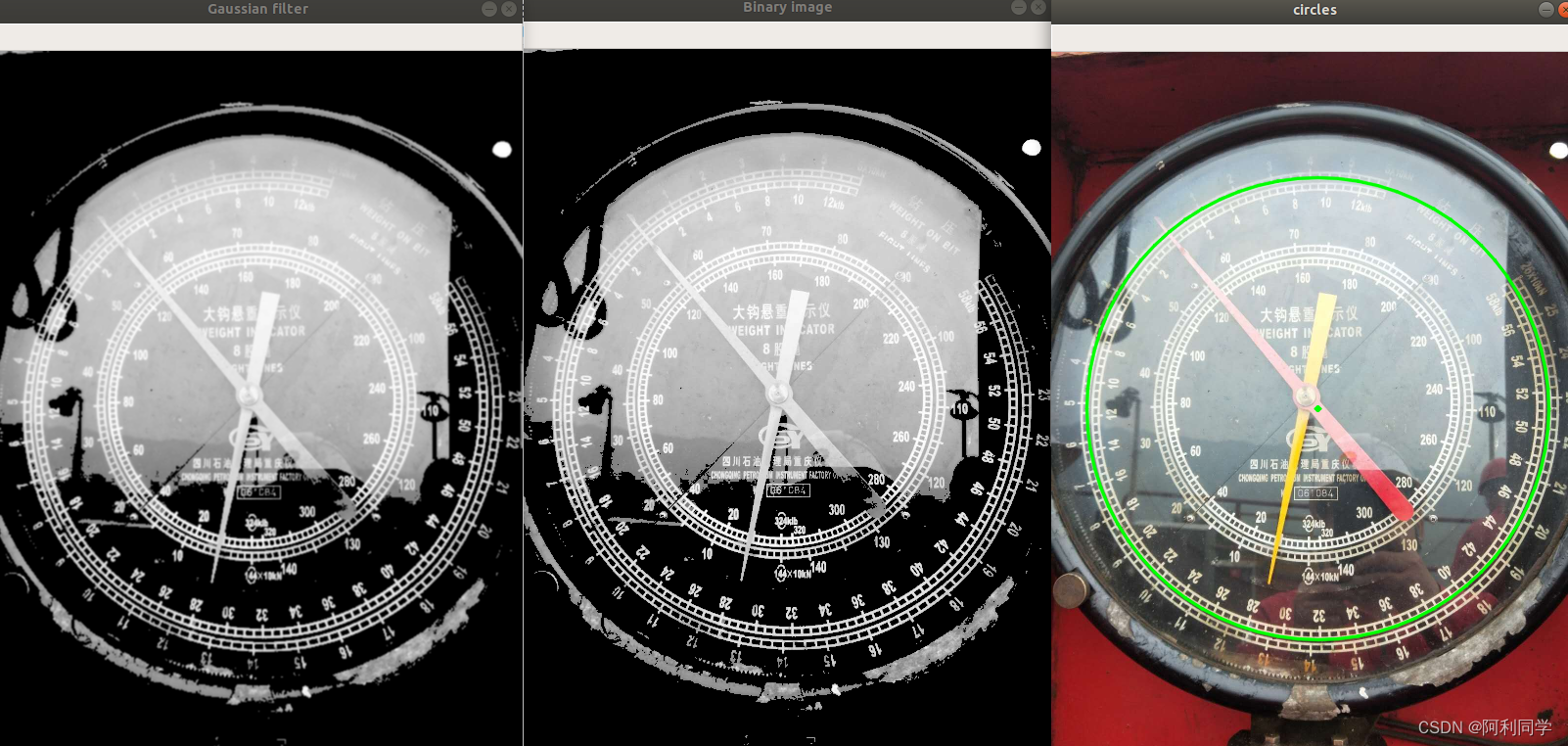
平滑滤波:为了去除噪声,可以使用中值滤波或高斯滤波。中值滤波通过将每个像素替换为其邻域像素的中值来消除噪声。高斯滤波则是通过计算像素周围邻域像素的加权平均值来平滑图像。你可以根据实际情况选择适合的滤波方法,例如使用
cv2.medianBlur()进行中值滤波或使用cv2.GaussianBlur()进行高斯滤波。对于指针式仪表的识别与读数,可以通过以下步骤使用OpenCV实现: -
读取图像:使用
cv2.imread()函数读取要处理的仪表图像。 -
灰度转换:使用
cv2.cvtColor()函数将彩色图像转换为灰度图像。这是因为灰度图像只有一个通道,便于后续的处理。
-
平滑滤波:为了去除噪声,可以使用中值滤波或高斯滤波。中值滤波通过将每个像素替换为其邻域像素的中值来消除噪声。高斯滤波则是通过计算像素周围邻域像素的加权平均值来平滑图像。你可以根据实际情况选择适合的滤波方法,例如使用
cv2.medianBlur()进行中值滤波或使用cv2.GaussianBlur()进行高斯滤波。 -
边缘检测:使用Canny边缘检测算法来检测图像中的边缘。Canny边缘检测算法首先使用Sobel算子计算图像的梯度强度和方向,然后通过非最大抑制和双阈值处理来提取出真正的边缘。使用
cv2.Canny()函数可以方便地进行Canny边缘检测,你可以根据实际情况调整阈值参数。 -
轮廓提取:使用
cv2.findContours()函数来提取边缘图像中的轮廓。轮廓是连续的曲线,可以用来表示物体的形状。通过设置适当的参数,可以选择性地提取出仪表盘的指针轮廓。 -
指针识别:对于仪表指针,通常可以通过以下特征进行识别:
-
面积大小:指针通常具有相对较大的面积。
-
形状:指针通常是细长的形状,可以通过检查轮廓的形状来判断是否为指针。
-
位置:指针通常位于仪表盘中心附近。
可以遍历提取到的轮廓,根据以上特征来筛选出指针轮廓。
-
读数计算:对于选定的指针轮廓,可以通过计算指针与仪表盘中心之间的夹角来得到仪表的读数。可以使用
cv2.minEnclosingCircle()函数找到指针的中心点,然后计算指针中心点与仪表盘中心点之间的夹角。
以上就是通过OpenCV对指针式仪表进行读数的一般步骤。根据实际情况,你可能需要调整参数、采取不同的滤波方法或添加其他处理步骤来适应不同的仪表图像。
-
边缘检测:使用Canny边缘检测算法来检测图像中的边缘。Canny边缘检测算法首先使用Sobel算子计算图像的梯度强度和方向,然后通过非最大抑制和双阈值处理来提取出真正的边缘。使用
cv2.Canny()函数可以方便地进行Canny边缘检测,你可以根据实际情况调整阈值参数。 -
轮廓提取:使用
cv2.findContours()函数来提取边缘图像中的轮廓。轮廓是连续的曲线,可以用来表示物体的形状。通过设置适当的参数,可以选择性地提取出仪表盘的指针轮廓。 -
指针识别:对于仪表指针,通常可以通过以下特征进行识别:
- 面积大小:指针通常具有相对较大的面积。
- 形状:指针通常是细长的形状,可以通过检查轮廓的形状来判断是否为指针。
- 位置:指针通常位于仪表盘中心附近。
可以遍历提取到的轮廓,根据以上特征来筛选出指针轮廓。
-
读数计算:对于选定的指针轮廓,可以通过计算指针与仪表盘中心之间的夹角来得到仪表的读数。可以使用
cv2.minEnclosingCircle()函数找到指针的中心点,然后计算指针中心点与仪表盘中心点之间的夹角。
结果展示
可以看出下图给出了角度值,通过圆盘的固定尺度的丈量,就可以自动化推理出,指数是多少。

代码与总结
要基于OpenCV对指针式仪表进行读数,可以采用以下步骤:
- 读取图像:使用cv2.imread()函数读取图像文件,或从摄像头中实时获取图像。
- 图像预处理:对图像进行预处理,以便提取出仪表盘的指针和刻度线等关键部分。例如,可以使用cv2.cvtColor()函数将图像转换为灰度图像,然后使用cv2.GaussianBlur()函数进行高斯模糊,以去除噪声。
- 提取特征:使用OpenCV的特征提取算法,如Canny边缘检测、Hough变换等,找到仪表盘的指针和刻度线等关键部分。
- 计算角度:通过计算指针与刻度线之间的夹角,即可得到仪表的读数。可以使用cv2.minEnclosingCircle()函数找到指针的中心点,然后计算指针中心点与仪表盘中心点之间的夹角。
- 显示结果:将读数显示在图像上,并将图像显示出来或保存为文本
import cv2
import numpy as np
# 读取图像
img = cv2.imread('meter.jpg')
# 图像预处理
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
# 提取特征
edges = cv2.Canny(blur, 50, 200, apertureSize=3)
lines = cv2.HoughLines(edges, 1, np.pi/180, 100)
# 找到指针和刻度线
for line in lines:
rho, theta = line[0]
if theta < np.pi/4 or theta > 3*np.pi/4:
x0 = np.cos(theta) * rho
y0 = np.sin(theta) * rho
pt1 = (int(x0 + 1000*(-np.sin(theta))), int(y0 + 1000*np.cos(theta)))
pt2 = (int(x0 - 1000*(-np.sin(theta))), int(y0 - 1000*np.cos(theta)))
cv2.line(img, pt1, pt2, (0, 0, 255), 3)
# 计算角度
center = (img.shape[1]//2, img.shape[0]//2)
最后
#联系qq1309399183