e2studio开发磁力计LIS2MDL.2--电子罗盘
- 概述
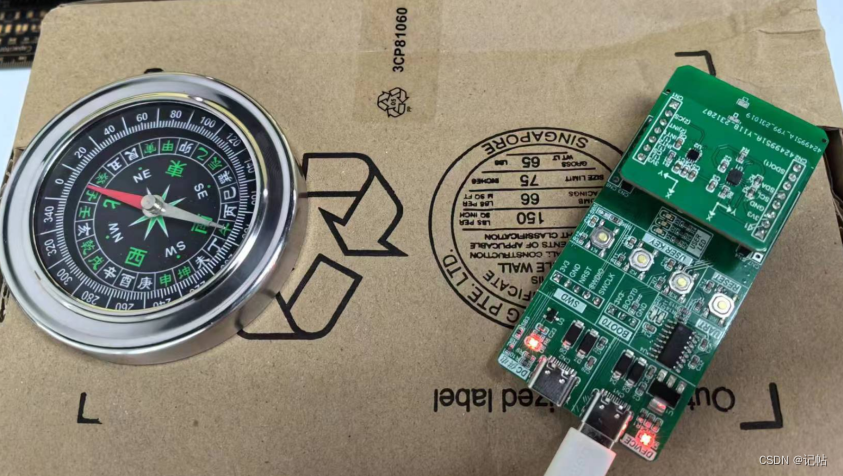
- 使用硬件
- 视频教学
- 样品申请
- 源码下载
- 环境磁场建模
- 消除硬铁误差
- 软铁干扰
- 演示
- 主程序
概述
本文将介绍如何使用 LIS2MDL 传感器来读取数据来转化为指南针。
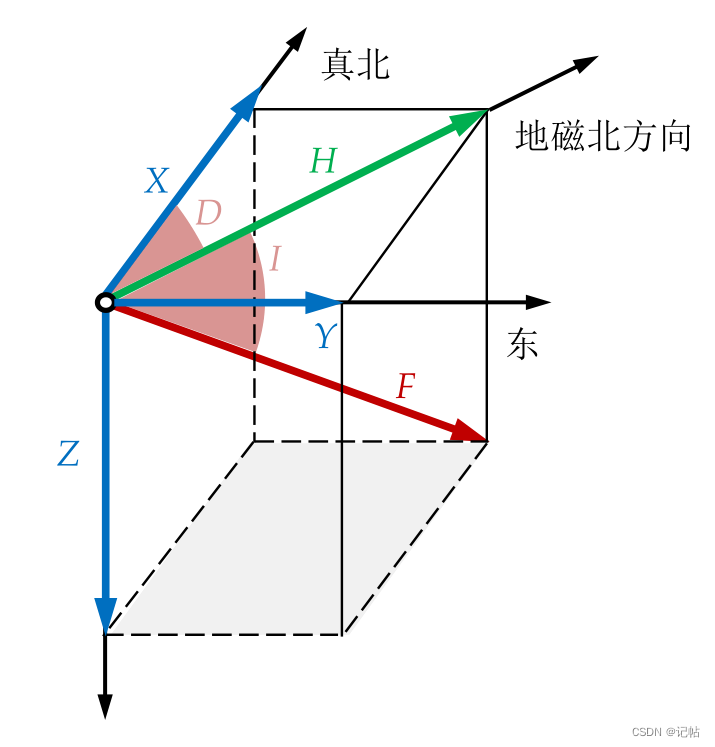
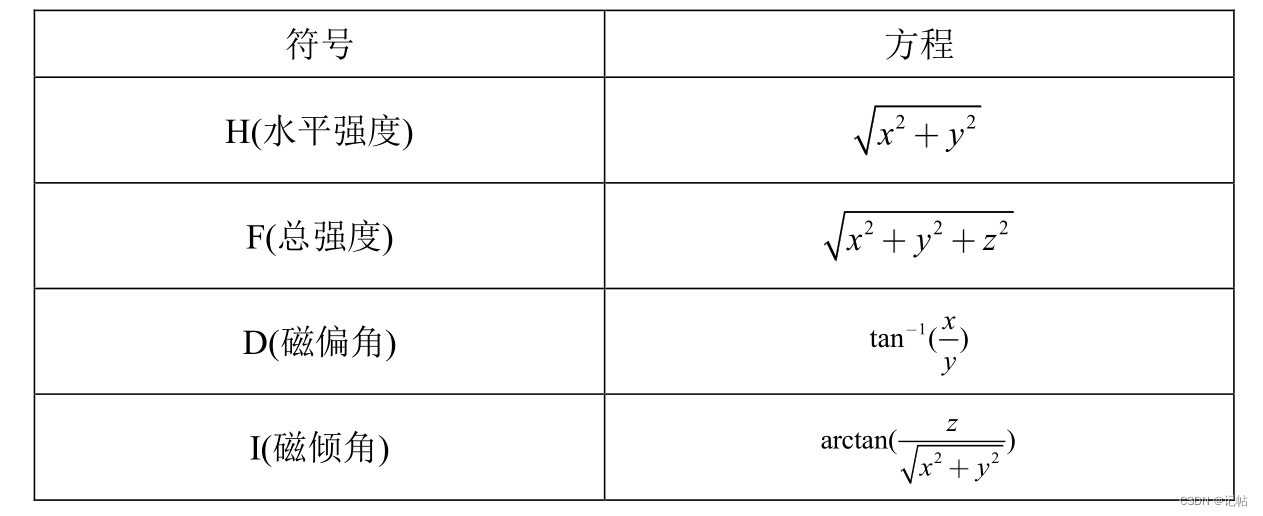
地磁场强度范围约为 23,000 至 66,000 nT ,并且可以建模为磁偶极子,其场线起源于地球地理南部附近的点,并终止于磁场附近的点。磁场具有七个分量,如图 所示。x,y和z分别表示北分量,东分量和垂直分量的磁场强度。H代表总水平强度,F代表磁场的总强度,而D和I分别代表磁偏角和磁倾角。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
使用硬件
视频教学
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
环境磁场建模
尽管可以选择七个不同的元素来处理给定点的磁场,但并非所有元素都是进行定位的理想选择。X,Y 和 Z 的三个元素是从磁力计获得的基本值,而其他四个元素是使用这些元素来计算的。前三个元素随移动设备方位角的改变而偏离,因此,对于许多基于磁场的室内定位系统通常假设以固定方位工作,行人可以更改方向,但不能更改设备方位。
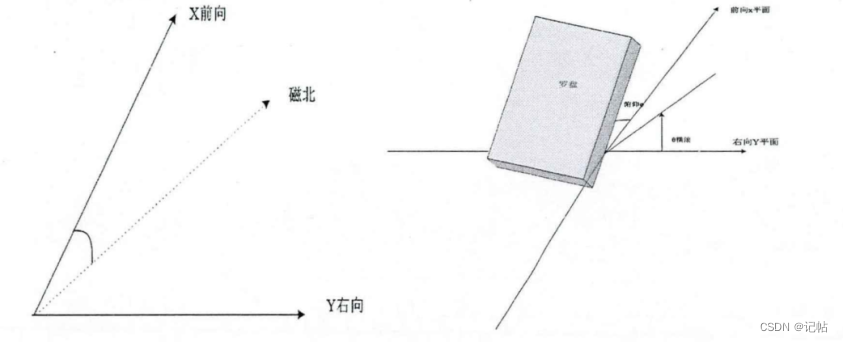
在大地坐标系的水平面上,假设磁北和x轴的夹角为a, x方向的磁分量是Mx,y方向的分量是My,则
ɑ=arctan(My/Mx)
这是电子罗盘定向的基本原理。实际应用中,电子罗盘不能总是保持在水平面上,如下图所示一样存在俯仰角和横滚角。将罗盘坐标系下的 z轴向下, 3个轴的磁分量投影到水平面上可以得到Xh,Yh,相应的磁感应值:
Xh=Xcosф+Ysinфsinθ - Zsinфcosθ
Yh=Ycosθ + Zsinθ
相应的
ɑ=arctan(Yh/Xh)
Angle_XY=atan2( (magnetic_mG[1]-Xoffset),(magnetic_mG[0]-Yoffset) ) * (180/3.14159265)+180;//计算角度
Angle_XZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[0]-Yoffset) ) * (180/3.14159265)+180;//计算角度
Angle_YZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[1]-Yoffset) ) * (180/3.14159265)+180;//计算角度
消除硬铁误差
电子罗盘有两种工作模式,一种是正常工作模式,另一种是出厂设置模式,这种出场设置模式就是为了消除硬铁干扰。硬铁干扰产生于永久磁铁,和被磁化的金属,或罗盘平台上的钢。这些干扰会保持大小恒定,与罗盘的相对位置固定,而与罗盘指向无关。所以当罗盘安装好后,它周围的硬铁干扰就几乎不会改变了,只要对罗盘做一次准确的标定,就能很轻松的消除这项干扰。
硬铁干扰在罗盘输出的每个轴向加了一个定值,输出曲线图的圆心被移动了,对于航向的影响则是一个周期性的误差,如下图所示在理想状态时,在 360 度范围内,传感器输出极值分别为 ymax ymin xmax xmin 坐标原点为O,受到硬铁干扰后,极值变为 y’max ,y’min , x’max , x’max , 坐标原点变为O’ 。要消除硬铁干扰,可以将罗盘和平台旋转一周,得
到圆上的足够的点再得到圆心偏移。
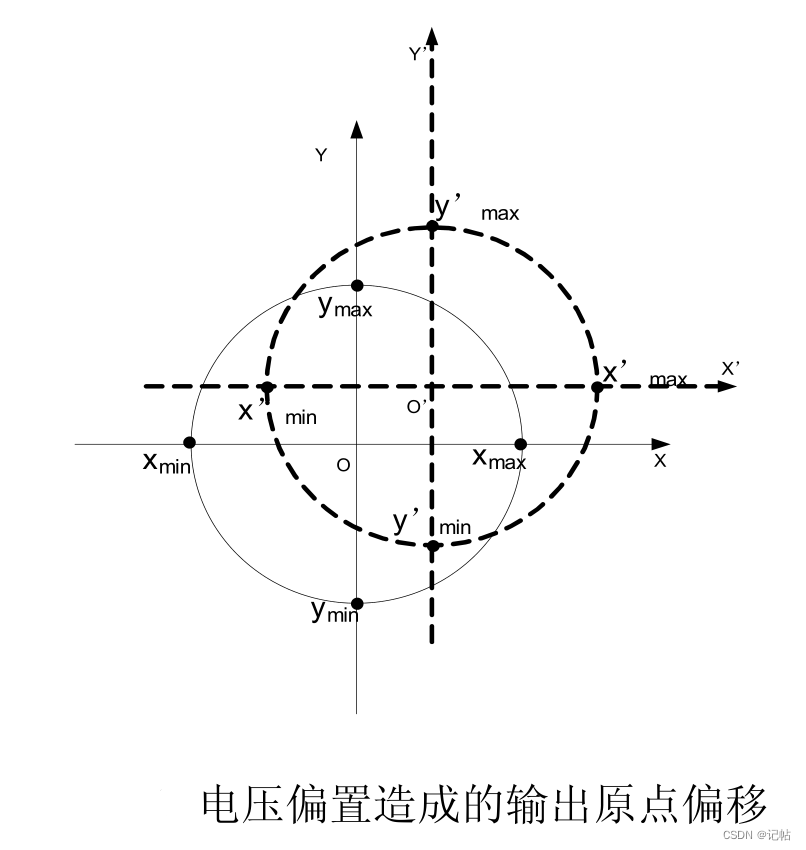
具体操作过程如下:接通电源后,将罗盘匀速旋转,使微控制器采集 360 °范围内的数据,通过数值比较,找出 x 、 y 方向的极值,得出偏移坐标 O’, 即电桥的偏置电压,并将此电压值保存,每次罗盘读数时都会减去此偏移。实际上,本设计在方位角的计算过程就是此过程,所以在计算方位角的同时已经消除了硬铁干扰。这种方法也可以消除由于温度漂移产生的误差。
软铁干扰
软铁干扰来源于地球磁场和罗盘附近的任何磁性材料之间的相互作用,同硬铁材料一样,软金属也干扰地球的磁力线,不同点是,软磁的干扰程度,与罗盘的方向有关。对软铁干扰的校正,比较复杂,下面讨论采用霍尼韦尔公司的 Michal.J.Caruso 提出椭圆假设的误差补偿原理进行误差补偿的方法 。
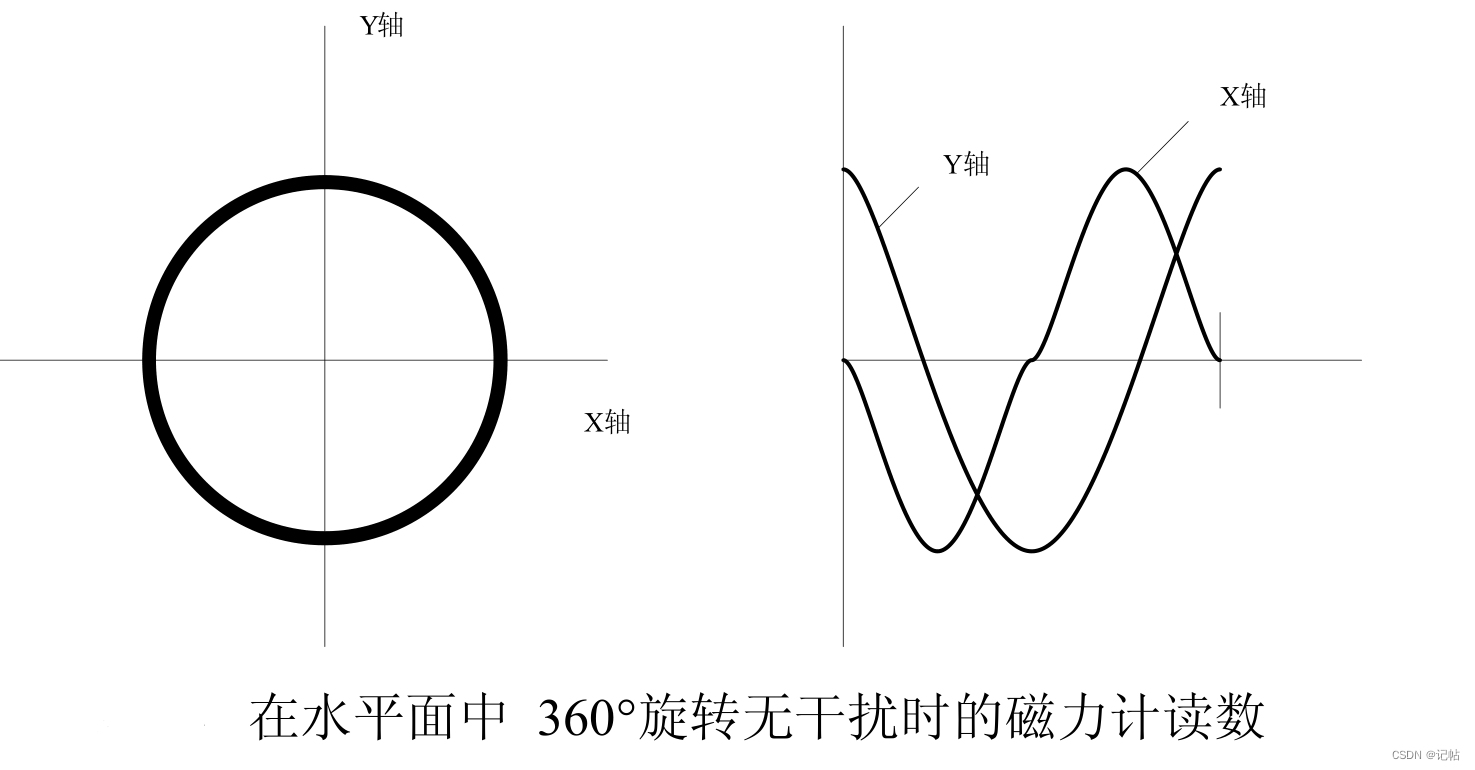
根据 Michal.J.Caruso 的研究,罗盘在理想的没有任何干扰的磁场水平面里作圆形旋转时,磁力计的显示应该呈现上图的状态,其中圆中心在 0,0 点处,每个计数代表 67微高斯,在 X 和 Y 平面中的地球磁场强度值读到 2800 个计数,约为 190 毫高斯,根据下面公式可以对每个读数确定一个方位角。
如果将磁力计安装在有发动机或者其他铁磁材料的环境中,圆形旋转时,磁力计的显示应该下图的状态。
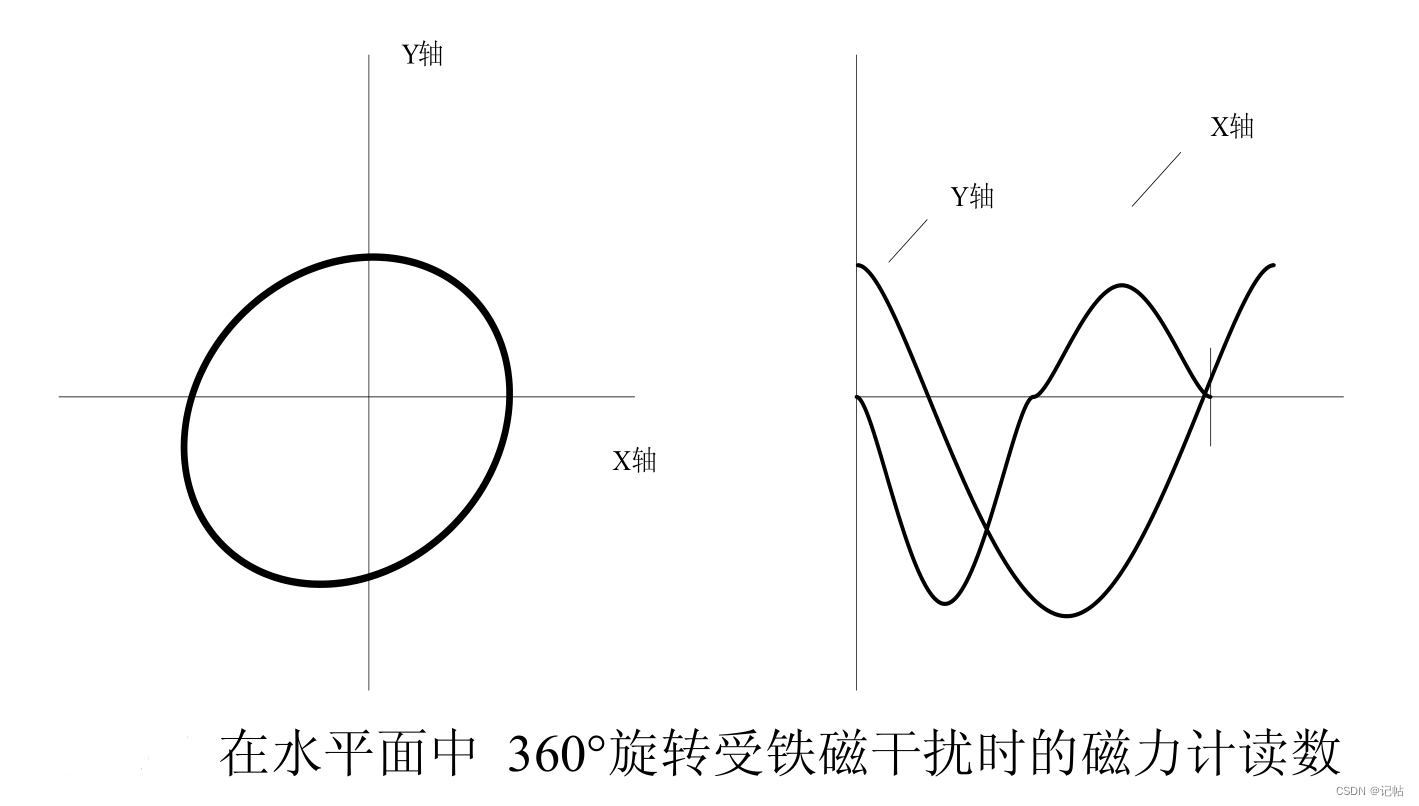
这里的图形不是一个圆 ( 有点椭圆 ) ,而它偏移 0,0 点为 -480 和 -795 个计数,这偏移和椭圆效应是干扰磁场对地球磁场作用的结果。通过确定两个定标因数 Xsf 和 Ysf 可以将椭圆改为圆。随后计算偏移值 Xoff 和 Yoff, 将圆中心定在 0,0 原点,用下面公式来计算 Y,X 值。
X 值 =Xsf×X 读数 +Xoff
Y 值 =Ysf×Y 读数 +Yoff
这里的定标因数 Xsf 和 Ysf 可由下述方法获得。
①将罗盘在水平面做旋转运动
②找出 X 和 Y 读数的最大值和最小值
③用这四个数值确定 X 和 Y 定标因数 (Xsf , Ysf) ,以及零偏移值 (Xoff , Yoff)
Xsf=1 或 (Y 最大 -Y 最小 )/2(X 最大 -Y 最小 )
以较大的数值为准
Ysf=1 或 (X 最大 -Y 最小 )/2(Y 最大 -Y 最小 )
以较大的数值为准
Xoff=[(X 最大 -X 最小 ) /2-X 最大 ]×Xsf
Yoff=[(Y 最大 -Y 最小 ) /2-Y 最大 ]×Ysf
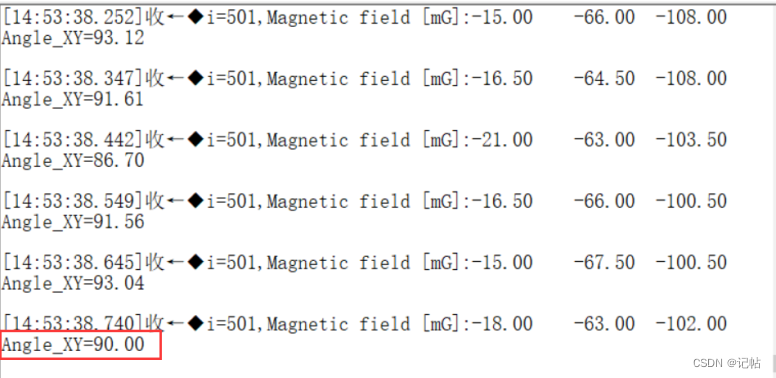
演示

主程序
在主程序中添加开机校准。
#include "hal_data.h"
#include <stdio.h>
#include "lis2mdl_reg.h"
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
/* Callback function */
i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED;
uint32_t timeout_ms = 100000;
void sci_i2c_master_callback(i2c_master_callback_args_t *p_args)
{
i2c_event = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event = p_args->event;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
#define SENSOR_BUS g_i2c_master0_ctrl
/* Private macro -------------------------------------------------------------*/
#define BOOT_TIME 20 //ms
/* Private variables ---------------------------------------------------------*/
static int16_t data_raw_magnetic[3];
static int16_t data_raw_temperature;
static float magnetic_mG[3];
static float temperature_degC;
static uint8_t whoamI, rst;
static uint8_t tx_buffer[1000];
/* Extern variables ----------------------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/*
* WARNING:
* Functions declare in this section are defined at the end of this file
* and are strictly related to the hardware platform used.
*
*/
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp,
uint16_t len);
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp,
uint16_t len);
static void tx_com(uint8_t *tx_buffer, uint16_t len);
static void platform_delay(uint32_t ms);
static void platform_init(void);
/*******************************************************************************************************************//**
* main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function
* is called by main() when no RTOS is used.
**********************************************************************************************************************/
void hal_entry(void)
{
/* TODO: add your own code here */
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
printf("hello world!\n");
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_14, BSP_IO_LEVEL_HIGH);
/* Initialize the I2C module */
err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Initialize mems driver interface */
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &SENSOR_BUS;
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lis2mdl_device_id_get(&dev_ctx, &whoamI);
printf("LIS2MDL_ID=0x%x,whoamI=0x%x\n",LIS2MDL_ID,whoamI);
if (whoamI != LIS2MDL_ID)
while (1) {
/* manage here device not found */
}
/* Restore default configuration */
lis2mdl_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lis2mdl_reset_get(&dev_ctx, &rst);
} while (rst);
/* Enable Block Data Update */
lis2mdl_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set Output Data Rate */
lis2mdl_data_rate_set(&dev_ctx, LIS2MDL_ODR_10Hz);
/* Set / Reset sensor mode */
lis2mdl_set_rst_mode_set(&dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR);
/* Enable temperature compensation */
lis2mdl_offset_temp_comp_set(&dev_ctx, PROPERTY_ENABLE);
/* Set device in continuous mode */
lis2mdl_operating_mode_set(&dev_ctx, LIS2MDL_CONTINUOUS_MODE);
int Xmax=0,Xmin=0;
int Ymax=0,Ymin=0;
int Zmax=0,Zmin=0;
int i=0;
int Xoffset,Yoffset,Zoffset;
float angle;
static float Angle_XY;
static float Angle_XZ;
static float Angle_YZ;
static float Xsf;
static float Ysf;
static float Zsf;
while (1)
{
uint8_t reg;
/* Read output only if new value is available */
lis2mdl_mag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read magnetic field data */
memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t));
lis2mdl_magnetic_raw_get(&dev_ctx, data_raw_magnetic);
magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]);
magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]);
magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
// printf("Magnetic field [mG]:%4.2f\t%4.2f\t%4.2f\r\n",magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]);
// /* Read temperature data */
// memset(&data_raw_temperature, 0x00, sizeof(int16_t));
// lis2mdl_temperature_raw_get(&dev_ctx, &data_raw_temperature);
// temperature_degC = lis2mdl_from_lsb_to_celsius(data_raw_temperature);
// printf("Temperature [degC]:%6.2f\r\n",temperature_degC);
printf("i=%d,Magnetic field [mG]:%4.2f\t%4.2f\t%4.2f\r\n",i,magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]);
if(i<500)
{
i++;
if(magnetic_mG[0]<Xmin)
Xmin=magnetic_mG[0];
else if(magnetic_mG[0]>Xmax)
Xmax=magnetic_mG[0];
if(magnetic_mG[1]<Ymin)
Ymin=magnetic_mG[1];
else if(magnetic_mG[1]>Ymax)
Ymax=magnetic_mG[1];
if(magnetic_mG[2]<Zmin)
Zmin=magnetic_mG[2];
else if(magnetic_mG[2]>Zmax)
Zmax=magnetic_mG[2];
}
else if(i==500)
{
i++;
Xsf = (Ymax - Ymin) / (Xmax - Xmin);
Ysf = (Xmax - Xmin) / (Ymax - Ymin);
if (Xsf < 1)
Xsf = 1;
if (Ysf < 1)
Ysf = 1;
Xoffset=( (Xmax-Xmin)/2 - Xmax) *Xsf;
Yoffset=( (Ymax-Ymin)/2 - Ymax) *Ysf;
// Zoffset=( (Zmax-Zmin)/2 - Zmax) *Xsf;
}
else
{
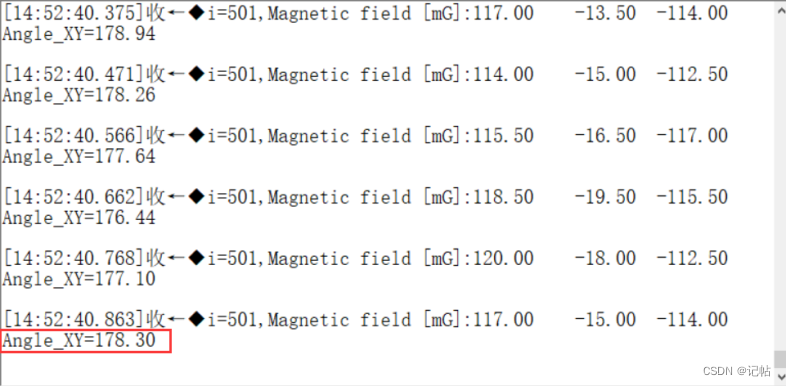
Angle_XY=atan2( (magnetic_mG[1]-Yoffset),(magnetic_mG[0]-Xoffset) ) * (180/3.14159265)+180;//计算角度
printf("Angle_XY=%3.2f\n",Angle_XY);
// Angle_XZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[0]-Xoffset) ) * (180/3.14159265)+180;//计算角度
// Angle_YZ=atan2( (magnetic_mG[2]-Zoffset),(magnetic_mG[1]-Yoffset) ) * (180/3.14159265)+180;//计算角度
// printf("Angle_XY=%3.2f,Angle_XZ=%3.2f,Angle_YZ=%3.2f\n",Angle_XY,Angle_XZ,Angle_YZ);
}
}
R_BSP_SoftwareDelay(10, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}