一、前言
本文旨在分享单片机对超声波模块的驱动,测量距离和显示
二、超声波的驱动
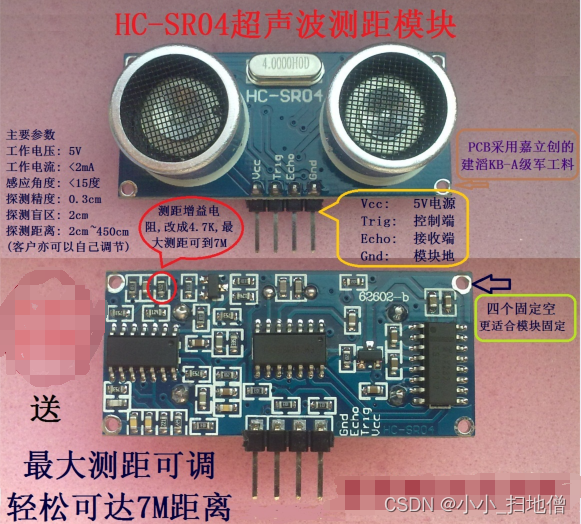
1、超声波模块

2、模块性能
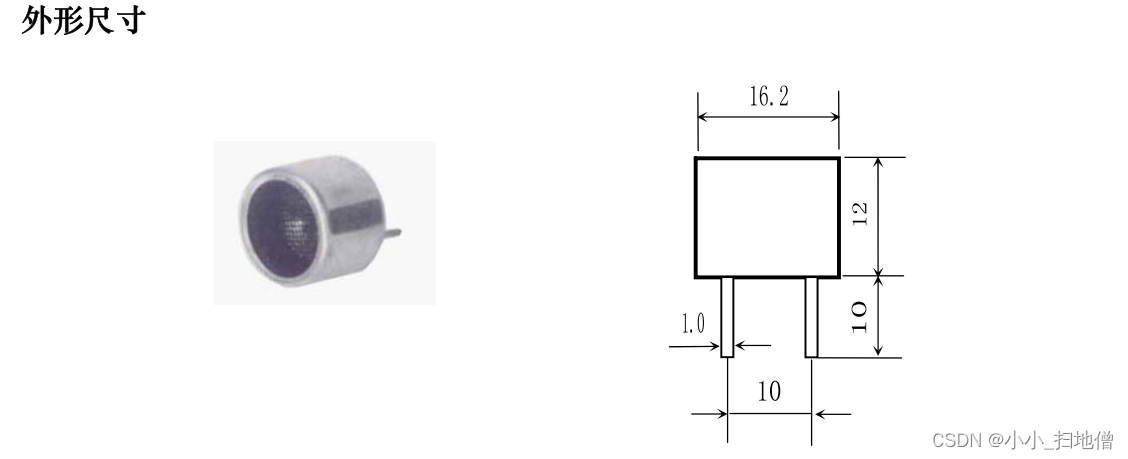
(1)TCT40-16T/R1 压电陶瓷超声传感器(通用型)


3、接口定义
Vcc、 Trig(控制端)、 Echo(接收端)、 Gnd
4、使用方法
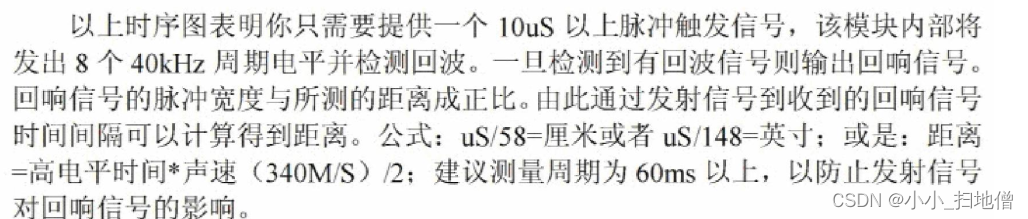
控制口发一个 10US 以上的高电平,就可以在接收口等待高电平输出.一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了。
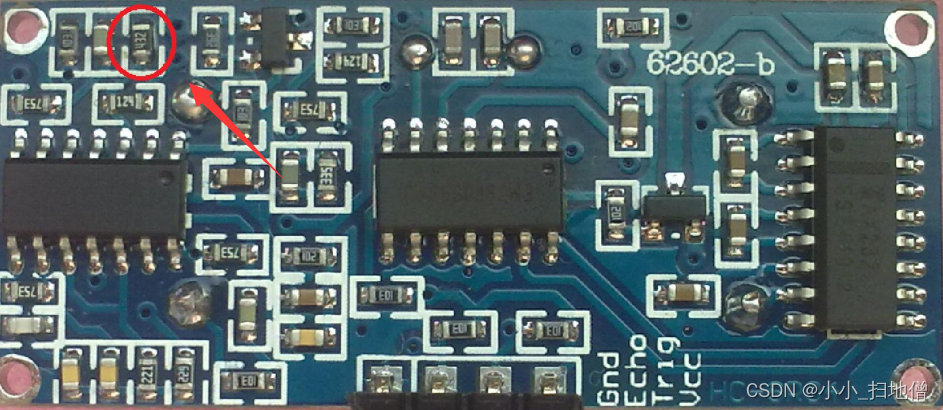
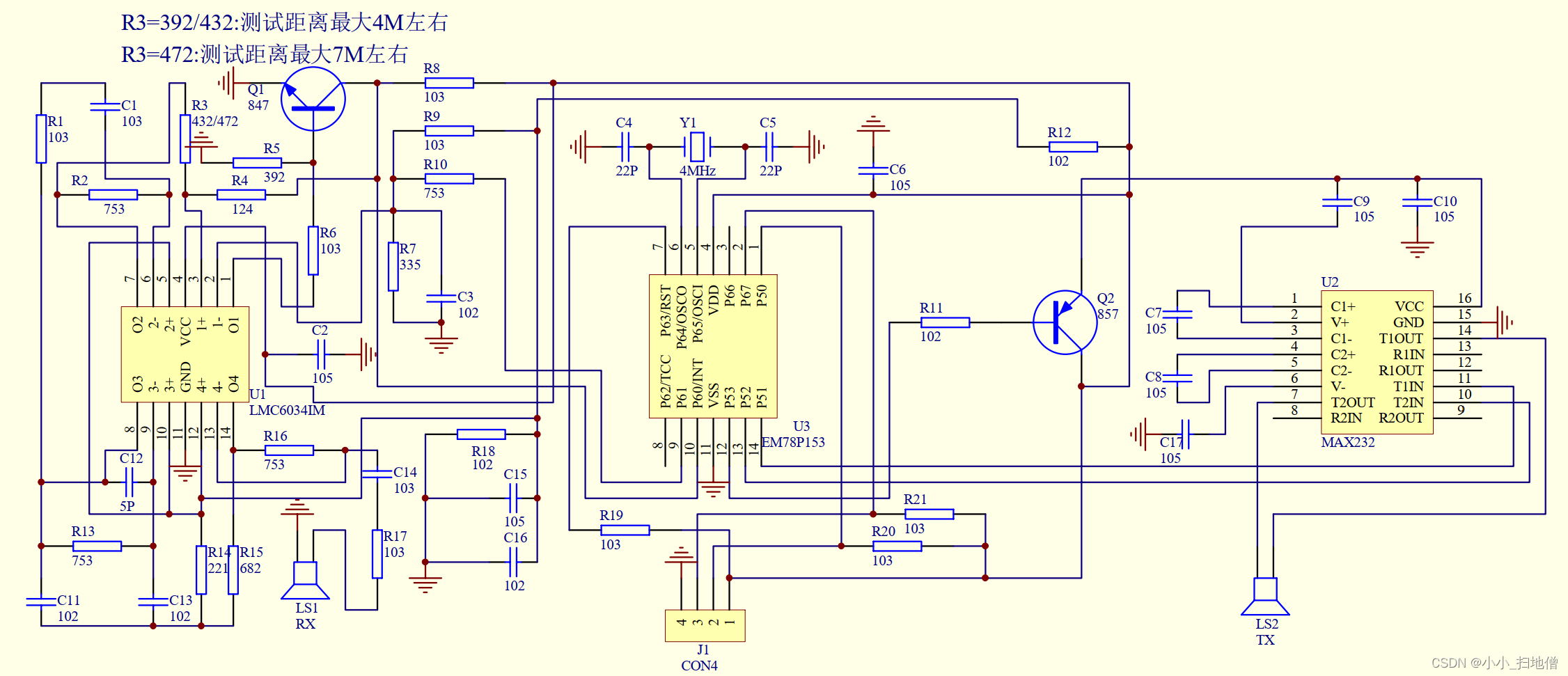
5、最远探测距离调节
上图标志电阻即 R3,可以调节最大探测距离。R3 电阻为 392,探测距离最大 4.5M 左右,探测角度小于 15 度;R3 电阻为 472,探测距离最大 7M 左右,探测角度小于 30 度;出厂默认 392,即最大探测距离 4.5M 左右。R3 电阻大,接收部分增益高,检测距离大,但检测角度会相应变大,容易检测到前方旁边的物体。当然,客户在不要求很高的测试距离的条件下,
可以改小 R3 来减小探测角度,这时最大测距会减小。
6、工作原理
(1)采用 IO 触发测距,给至少 10us 的高电平信号;
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 输出一高电平,高电平持续的时间就是
(4)超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;

7、注意事项
1:此模块不宜带电连接,如果要带电连接,则先让模块的 Gnd 端先连接。否则会影响
模块工作。
2:测距时,被测物体的面积不少于 0.5 平方米且要尽量平整。否则会影响测试结果。
8、模块原理图
三、驱动代码
1、超声波PIC单片机C程序
//
// PIC16F877 + HC-SR04 + LCD03 example
// Written October 2008 , using HITECH PIC16 compiler
//
// Note - assumes a 20MHz crystal, which is 5MHz timer clock
// A 1:4 prescaler is used to give a 1.25MHz timer count (0.8uS per tick)
//
// This code is Freeware - Use it for any purpose you like.
//
///
#include <pic.h>
#include <stdio.h>
__CONFIG(0x3b32);
#define trig RB0
#define echo RB1
void clrscn(void); // prototypes
void cursor(char pos);
void print(char *p);
void setup(void);
unsigned int get_srf04(void);
char s[21]; // buffer used to hold text to print
void main(void)
{
unsigned int range;
setup(); // sets up the PIC16F877 I2C port
clrscn(); // clears the LCD03 disply
cursor(2); // sets cursor to 1st row of LCD03
sprintf(s,"SRF04 Ranger Test"); // text, printed into our buffer
print(s); // send it to the LCD03
while(1) { // loop forever
range = get_srf04(); // get range from srf04 (round trip flight time in 0.8uS units)
cursor(24); // sets cursor to 2nd row of LCD03
sprintf(s,"Range = %dcm ", range/72); // convert to cm
print(s); // send it to the LCD03
cursor(44); // sets cursor to 3rd row of LCD03
sprintf(s,"Range = %dinch ", range/185); // convert to inches
print(s); // send it to the LCD03
TMR1H = 0; // 52mS delay - this is so that the SRF04 ranging is not too rapid
TMR1L = 0; // and the previous pulse has faded away before we start the next one
T1CON = 0x21; // 1:4 prescale and running
TMR1IF = 0;
while(!TMR1IF); // wait for delay time
TMR1ON = 0; // stop timer
}
}
unsigned int get_srf04(void)
{
TMR1H = 0xff; // prepare timer for 10uS pulse
TMR1L = -14;
T1CON = 0x21; // 1:4 prescale and running
TMR1IF = 0;
trig = 1; // start trigger pulse
while(!TMR1IF); // wait 10uS
trig = 0; // end trigger pulse
TMR1ON = 0; // stop timer
TMR1H = 0; // prepare timer to measure echo pulse
TMR1L = 0;
T1CON = 0x20; // 1:4 prescale but not running yet
TMR1IF = 0;
while(!echo && !TMR1IF); // wait for echo pulse to start (go high)
TMR1ON = 1; // start timer to measure pulse
while(echo && !TMR1IF); // wait for echo pulse to stop (go low)
TMR1ON = 0; // stop timer
return (TMR1H<<8)+TMR1L; // TMR1H:TMR1L contains flight time of the pulse in 0.8uS units
}
void clrscn(void)
{
SEN = 1; // send start bit
while(SEN); // and wait for it to clear
SSPIF = 0;
SSPBUF = 0xc6; // LCD02 I2C address
while(!SSPIF); // wait for interrupt
SSPIF = 0; // then clear it.
SSPBUF = 0; // address of register to write to
while(!SSPIF); //
SSPIF = 0; //
SSPBUF = 12; // clear screen
while(!SSPIF); //
SSPIF = 0; //
SSPBUF = 4; // cursor off
while(!SSPIF); //
SSPIF = 0; //
PEN = 1; // send stop bit
while(PEN); //
}
void cursor(char pos)
{
SEN = 1; // send start bit
while(SEN); // and wait for it to clear
SSPIF = 0;
SSPBUF = 0xc6; // LCD02 I2C address
while(!SSPIF); // wait for interrupt
SSPIF = 0; // then clear it.
SSPBUF = 0; // address of register to write to
while(!SSPIF); //
SSPIF = 0; //
SSPBUF = 2; // set cursor
while(!SSPIF); //
SSPIF = 0; //
SSPBUF = pos; //
while(!SSPIF); //
SSPIF = 0; //
PEN = 1; // send stop bit
while(PEN); //
}
void print(char *p)
{
SEN = 1; // send start bit
while(SEN); // and wait for it to clear
SSPIF = 0;
SSPBUF = 0xc6; // LCD02 I2C address
while(!SSPIF); // wait for interrupt
SSPIF = 0; // then clear it.
SSPBUF = 0; // address of register to write to
while(!SSPIF); //
SSPIF = 0; //
while(*p) {
SSPBUF = *p++; // write the data
while(!SSPIF); //
SSPIF = 0; //
}
PEN = 1; // send stop bit
while(PEN); //
}
void setup(void)
{
unsigned long x;
TRISB = 0xfe; // RB0 (trig) is output
PORTB = 0xfe; // and starts low
TRISC = 0xff;
PORTC = 0xff;
SSPSTAT = 0x80;
SSPCON = 0x38;
SSPCON2 = 0x00;
SSPADD = 50; // SCL = 91khz with 20Mhz Osc
for(x=0; x<300000L; x++); // wait for LCD03 to initialise
}
2、超声波测距51C程序
//晶振=8M
//MCU=STC10F04XE
//P0.0-P0.6共阳数码管引脚
//Trig = P1^0
//Echo = P3^2
#include <reg52.h> //包括一个52标准内核的头文件
#define uchar unsigned char //定义一下方便使用
#define uint unsigned int
#define ulong unsigned long
//***********************************************
sfr CLK_DIV = 0x97; //为STC单片机定义,系统时钟分频
//为STC单片机的IO口设置地址定义
sfr P0M1 = 0X93;
sfr P0M0 = 0X94;
sfr P1M1 = 0X91;
sfr P1M0 = 0X92;
sfr P2M1 = 0X95;
sfr P2M0 = 0X96;
//***********************************************
sbit Trig = P1^0; //产生脉冲引脚
sbit Echo = P3^2; //回波引脚
sbit test = P1^1; //测试用引脚
uchar code SEG7[10]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};//数码管0-9
uint distance[4]; //测距接收缓冲区
uchar ge,shi,bai,temp,flag,outcomeH,outcomeL,i; //自定义寄存器
bit succeed_flag; //测量成功标志
//********函数声明
void conversion(uint temp_data);
void delay_20us();
//void pai_xu();
void main(void) // 主程序
{ uint distance_data,a,b;
uchar CONT_1;
CLK_DIV=0X03; //系统时钟为1/8晶振(pdf-45页)
P0M1 = 0; //将io口设置为推挽输出
P1M1 = 0;
P2M1 = 0;
P0M0 = 0XFF;
P1M0 = 0XFF;
P2M0 = 0XFF;
i=0;
flag=0;
test =0;
Trig=0; //首先拉低脉冲输入引脚
TMOD=0x11; //定时器0,定时器1,16位工作方式
TR0=1; //启动定时器0
IT0=0; //由高电平变低电平,触发外部中断
ET0=1; //打开定时器0中断
//ET1=1; //打开定时器1中断
EX0=0; //关闭外部中断
EA=1; //打开总中断0
while(1) //程序循环
{
EA=0;
Trig=1;
delay_20us();
Trig=0; //产生一个20us的脉冲,在Trig引脚
while(Echo==0); //等待Echo回波引脚变高电平
succeed_flag=0; //清测量成功标志
EX0=1; //打开外部中断
TH1=0; //定时器1清零
TL1=0; //定时器1清零
TF1=0; //
TR1=1; //启动定时器1
EA=1;
while(TH1 < 30);//等待测量的结果,周期65.535毫秒(可用中断实现)
TR1=0; //关闭定时器1
EX0=0; //关闭外部中断
if(succeed_flag==1)
{
distance_data=outcomeH; //测量结果的高8位
distance_data<<=8; //放入16位的高8位
distance_data=distance_data|outcomeL;//与低8位合并成为16位结果数据
distance_data*=12; //因为定时器默认为12分频
distance_data/=58; //微秒的单位除以58等于厘米
} //为什么除以58等于厘米, Y米=(X秒*344)/2
// X秒=( 2*Y米)/344 ==》X秒=0.0058*Y米 ==》厘米=微秒/58
if(succeed_flag==0)
{
distance_data=0; //没有回波则清零
test = !test; //测试灯变化
}
/// distance[i]=distance_data; //将测量结果的数据放入缓冲区
/// i++;
/// if(i==3)
/// {
/// distance_data=(distance[0]+distance[1]+distance[2]+distance[3])/4;
/// pai_xu();
/// distance_data=distance[1];
a=distance_data;
if(b==a) CONT_1=0;
if(b!=a) CONT_1++;
if(CONT_1>=3)
{ CONT_1=0;
b=a;
conversion(b);
}
/// i=0;
/// }
}
}
//***************************************************************
//外部中断0,用做判断回波电平
INTO_() interrupt 0 // 外部中断是0号
{
outcomeH =TH1; //取出定时器的值
outcomeL =TL1; //取出定时器的值
succeed_flag=1; //至成功测量的标志
EX0=0; //关闭外部中断
}
//****************************************************************
//定时器0中断,用做显示
timer0() interrupt 1 // 定时器0中断是1号
{
TH0=0xfd; //写入定时器0初始值
TL0=0x77;
switch(flag)
{case 0x00:P0=ge; P2=0xfd;flag++;break;
case 0x01:P0=shi;P2=0xfe;flag++;break;
case 0x02:P0=bai;P2=0xfb;flag=0;break;
}
}
//*****************************************************************
/*
//定时器1中断,用做超声波测距计时
timer1() interrupt 3 // 定时器0中断是1号
{
TH1=0;
TL1=0;
}
*/
//******************************************************************
//显示数据转换程序
void conversion(uint temp_data)
{
uchar ge_data,shi_data,bai_data ;
bai_data=temp_data/100 ;
temp_data=temp_data%100; //取余运算
shi_data=temp_data/10 ;
temp_data=temp_data%10; //取余运算
ge_data=temp_data;
bai_data=SEG7[bai_data];
shi_data=SEG7[shi_data];
ge_data =SEG7[ge_data];
EA=0;
bai = bai_data;
shi = shi_data;
ge = ge_data ;
EA=1;
}
//******************************************************************
void delay_20us()
{ uchar bt ;
for(bt=0;bt<100;bt++);
}
/*
void pai_xu()
{ uint t;
if (distance[0]>distance[1])
{t=distance[0];distance[0]=distance[1];distance[1]=t;} /*交换值
if(distance[0]>distance[2])
{t=distance[2];distance[2]=distance[0];distance[0]=t;} /*交换值
if(distance[1]>distance[2])
{t=distance[1];distance[1]=distance[2];distance[2]=t;} /*交换值
}
*/3、超声波测距LC1602显示
SMC1602A(16*2)模拟口线接线方式
连接线图:
---------------------------------------------------
|LCM-----51 | LCM-----51 | LCM------51 |
--------------------------------------------------|
|DB0-----P1.0 | DB4-----P1.4 | RW-------P3.4 |
|DB1-----P1.1 | DB5-----P1.5 | RS-------P3.3 |
|DB2-----P1.2 | DB6-----P1.6 | E--------P3.5 |
|DB3-----P1.3 | DB7-----P1.7 | VLCD接1K电阻到GND|
---------------------------------------------------
接线:模块TRIG接 P2.6 ECH0 接P2.7
[注:AT89x51使用12M或11.0592M晶振,实测使用11.0592M]
=============================================================*/
#include <AT89x51.H> //器件配置文件
#include <intrins.h>
#define RX P2_7
#define TX P2_6
#define LCM_RW P3_4 //定义LCD引脚
#define LCM_RS P3_3
#define LCM_E P3_5
#define LCM_Data P1
#define Key_Data P2_0 //定义Keyboard引脚
#define Key_CLK P3_2
#define Busy 0x80 //用于检测LCM状态字中的Busy标识
void LCMInit(void);
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData);
void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData);
void Delay5Ms(void);
void Delay400Ms(void);
void Decode(unsigned char ScanCode);
void WriteDataLCM(unsigned char WDLCM);
void WriteCommandLCM(unsigned char WCLCM,BuysC);
unsigned char ReadDataLCM(void);
unsigned char ReadStatusLCM(void);
unsigned char code mcustudio[] ={"mcustudio.com.cn"};
unsigned char code email[] = {"fhwxaoo@163.com "};
unsigned char code Cls[] = {" "};
unsigned char code ASCII[15] = {'0','1','2','3','4','5','6','7','8','9','.','-','M'};
static unsigned char DisNum = 0; //显示用指针
unsigned int time=0;
unsigned long S=0;
bit flag =0;
unsigned char disbuff[4] ={ 0,0,0,0,};
//写数据
void WriteDataLCM(unsigned char WDLCM)
{
ReadStatusLCM(); //检测忙
LCM_Data = WDLCM;
LCM_RS = 1;
LCM_RW = 0;
LCM_E = 0; //若晶振速度太高可以在这后加小的延时
LCM_E = 0; //延时
LCM_E = 1;
}
//写指令
void WriteCommandLCM(unsigned char WCLCM,BuysC) //BuysC为0时忽略忙检测
{
if (BuysC) ReadStatusLCM(); //根据需要检测忙
LCM_Data = WCLCM;
LCM_RS = 0;
LCM_RW = 0;
LCM_E = 0;
LCM_E = 0;
LCM_E = 1;
}
//读数据
unsigned char ReadDataLCM(void)
{
LCM_RS = 1;
LCM_RW = 1;
LCM_E = 0;
LCM_E = 0;
LCM_E = 1;
return(LCM_Data);
}
//读状态
unsigned char ReadStatusLCM(void)
{
LCM_Data = 0xFF;
LCM_RS = 0;
LCM_RW = 1;
LCM_E = 0;
LCM_E = 0;
LCM_E = 1;
while (LCM_Data & Busy); //检测忙信号
return(LCM_Data);
}
void LCMInit(void) //LCM初始化
{
LCM_Data = 0;
WriteCommandLCM(0x38,0); //三次显示模式设置,不检测忙信号
Delay5Ms();
WriteCommandLCM(0x38,0);
Delay5Ms();
WriteCommandLCM(0x38,0);
Delay5Ms();
WriteCommandLCM(0x38,1); //显示模式设置,开始要求每次检测忙信号
WriteCommandLCM(0x08,1); //关闭显示
WriteCommandLCM(0x01,1); //显示清屏
WriteCommandLCM(0x06,1); // 显示光标移动设置
WriteCommandLCM(0x0F,1); // 显示开及光标设置
}
//按指定位置显示一个字符
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
if (Y) X |= 0x40; //当要显示第二行时地址码+0x40;
X |= 0x80; //算出指令码
WriteCommandLCM(X, 1); //发命令字
WriteDataLCM(DData); //发数据
}
//按指定位置显示一串字符
void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData)
{
unsigned char ListLength;
ListLength = 0;
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
while (DData[ListLength]>0x19) //若到达字串尾则退出
{
if (X <= 0xF) //X坐标应小于0xF
{
DisplayOneChar(X, Y, DData[ListLength]); //显示单个字符
ListLength++;
X++;
}
}
}
//5ms延时
void Delay5Ms(void)
{
unsigned int TempCyc = 5552;
while(TempCyc--);
}
//400ms延时
void Delay400Ms(void)
{
unsigned char TempCycA = 5;
unsigned int TempCycB;
while(TempCycA--)
{
TempCycB=7269;
while(TempCycB--);
};
}
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.7)/100; //算出来是CM
if((S>=700)||flag==1) //超出测量范围显示“-”
{
flag=0;
DisplayOneChar(0, 1, ASCII[11]);
DisplayOneChar(1, 1, ASCII[10]); //显示点
DisplayOneChar(2, 1, ASCII[11]);
DisplayOneChar(3, 1, ASCII[11]);
DisplayOneChar(4, 1, ASCII[12]); //显示M
}
else
{
disbuff[0]=S%1000/100;
disbuff[1]=S%1000%100/10;
disbuff[2]=S%1000%10 %10;
DisplayOneChar(0, 1, ASCII[disbuff[0]]);
DisplayOneChar(1, 1, ASCII[10]); //显示点
DisplayOneChar(2, 1, ASCII[disbuff[1]]);
DisplayOneChar(3, 1, ASCII[disbuff[2]]);
DisplayOneChar(4, 1, ASCII[12]); //显示M
}
}
/********************************************************/
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
/********************************************************/
void StartModule() //启动模块
{
TX=1; //启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
/********************************************************/
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
/*********************************************************/
void main(void)
{
unsigned char TempCyc;
Delay400Ms(); //启动等待,等LCM讲入工作状态
LCMInit(); //LCM初始化
Delay5Ms(); //延时片刻(可不要)
DisplayListChar(0, 0, mcustudio);
DisplayListChar(0, 1, email);
ReadDataLCM();//测试用句无意义
for (TempCyc=0; TempCyc<10; TempCyc++)
Delay400Ms(); //延时
DisplayListChar(0, 1, Cls);
while(1)
{
TMOD=0x01; //设T0为方式1,GATE=1;
TH0=0;
TL0=0;
ET0=1; //允许T0中断
EA=1; //开启总中断
while(1)
{
StartModule();
// DisplayOneChar(0, 1, ASCII[0]);
while(!RX); //当RX为零时等待
TR0=1; //开启计数
while(RX); //当RX为1计数并等待
TR0=0; //关闭计数
Conut(); //计算
delayms(80); //80MS
}
}
}
4、超声波测距LCD12864显示
/******************************************************************************/
/* Name: LCD12864(St7920/St7921)+超声波测距模块+STC89C52 */
/* HC-SR04 超声波测距模块 DEMO 程序 */
/* 晶振:11.0592M */
/* 接线:模块TRIG接 P1.2 ECH0 接P1.1 */
/* RS(CS) 接 P3.3; */
/* RW(SID) 接 P3.4; */
/* E(SCLK) 接 P3.5; */
/* PSB 接 GND 串行模式 */
/******************************************************************************/
#include <AT89X51.H>
#include <intrins.h>
//引脚定义
sbit RX = P1 ^ 1;
sbit TX = P1 ^ 2;
sbit CS = P3 ^ 3; //片选 高电平有效 单片LCD使用时可固定高电平
sbit SID = P3 ^ 4; //数据
sbit SCLK = P3 ^ 5; //时钟
//Function Definition 函数声明
void Delay(int num);
void Init_DS18B20(void);
unsigned char ReadOneChar(void);
void WriteOneChar(unsigned char dat);
unsigned int ReadTemperature(void);
void clock_out(unsigned char dd);
unsigned char clock_in(void);
unsigned char read_clock(unsigned char ord);
void write_clock(unsigned char ord, unsigned char dd);
void Disp(void);
void id_case1_key(void);
void id_case2_key(void);
void Set_time(unsigned char sel,bit sel_1);
void Timer0_Init(void);
void Init_1302(void);
void Set_Bell(unsigned char sel, bit sel_1);
void Bell(void);
//12864
void Write_char(bit start, unsigned char ddata);
void Send_byte(unsigned char bbyte);
void Delaynms(unsigned int di);
void Lcd_init(void);
void Disp_img(unsigned char *img);
void LCD_Write_string(unsigned char X,unsigned char Y,unsigned char *s);
void LCD_set_xy( unsigned char x, unsigned char y );
unsigned char code num[]={"0123456789 :.-"};
unsigned char code waves[]={"超声波测距系统"};
unsigned char code znwk[] ={"智能微控工作室"};
unsigned char code CM[] = {"M"};
unsigned int time=0;
long S=0;
bit flag =0;
unsigned char disbuff[4] ={ 0,0,0,0,};
unsigned char code logo[]={
/*-- 调入了一幅图像:logo.bmp -- */
/*-- 宽度x高度=128x64 欢迎使用本产品LOGO --*/
/*-- 调入了一幅图像:C:\Documents and Settings\lwd\桌面\新建文件夹\X.bmp --*/
/*-- 宽度x高度=128x64 --*/
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x60,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0xE0,0x00,0x00,0x0C,0x00,0x00,0x40,0x70,0x00,0x00,0x00,0x80,0x00,
0x00,0x00,0x00,0xE0,0x00,0x00,0x1E,0x00,0x00,0x60,0x70,0x00,0x00,0x0F,0xE0,0x00,
0x00,0x00,0x01,0xC0,0x00,0x60,0x3C,0x00,0x00,0xE0,0x60,0x00,0x1F,0xFF,0xE0,0x00,
0x00,0x00,0x03,0x80,0x00,0x70,0x70,0x40,0x00,0xE0,0x7E,0x00,0x1F,0xE0,0xC0,0x00,
0x00,0x00,0x03,0x00,0x00,0x73,0xC3,0xF0,0x01,0xC3,0xFC,0x00,0x38,0xE1,0xC0,0x00,
0x00,0x03,0xC6,0x3C,0x00,0x33,0x9F,0xF0,0x03,0x8F,0xC0,0x00,0x30,0xC1,0xC0,0x00,
0x00,0x3F,0xEF,0xFE,0x00,0x03,0x1C,0xE0,0x07,0x01,0xCC,0x00,0x31,0xF1,0x80,0x00,
0x00,0x79,0xDF,0xBC,0x00,0x06,0x18,0xC0,0x0E,0x01,0xFE,0x00,0x77,0xF9,0x80,0x00,
0x00,0x01,0xB0,0x30,0x01,0xC6,0x19,0xC0,0x1E,0x7F,0xDE,0x00,0x6F,0x83,0x80,0x00,
0x00,0x23,0xAC,0x60,0x0F,0xE6,0xF1,0x80,0x3E,0x7B,0x38,0x00,0x61,0x83,0x00,0x00,
0x00,0x37,0x0E,0x00,0x0F,0xC7,0xB7,0x80,0xEC,0x63,0x30,0x00,0xE3,0x03,0x00,0x00,
0x00,0x3E,0x0E,0x00,0x01,0x8F,0x37,0x01,0xCC,0x6F,0xF0,0x00,0xC7,0xF7,0x00,0x00,
0x00,0x1E,0x0C,0x00,0x03,0x1E,0x66,0x03,0x0C,0x7F,0x00,0x01,0xFF,0xE6,0x00,0x00,
0x00,0x1E,0x1C,0x00,0x03,0x1C,0x60,0x02,0x19,0xAC,0x00,0x01,0x96,0x06,0x00,0x00,
0x00,0x3E,0x3E,0x00,0x03,0x18,0x60,0x00,0x19,0xFC,0x00,0x03,0x86,0x0E,0x00,0x00,
0x00,0x7E,0x36,0x00,0x03,0x00,0xC0,0x00,0x38,0x78,0x00,0x03,0x06,0x0C,0x00,0x00,
0x00,0xE6,0x67,0x00,0x03,0x00,0xC0,0x00,0x30,0x78,0x00,0x06,0x0C,0x0C,0x00,0x00,
0x01,0xC6,0xC3,0x80,0x7F,0xF0,0xC0,0x00,0x30,0xFE,0x00,0x0E,0x0C,0x1C,0x00,0x00,
0x03,0x81,0x83,0xC0,0x78,0xFF,0x80,0x00,0x61,0xCF,0x80,0x1C,0x08,0x18,0x00,0x00,
0x06,0x07,0x03,0xE0,0x00,0x1F,0xFF,0xE0,0x67,0x07,0xE0,0x38,0x18,0xF8,0x00,0x00,
0x08,0x0E,0x01,0xF8,0x00,0x07,0xFF,0x80,0xCE,0x03,0xF8,0x60,0x00,0x70,0x00,0x00,
0x00,0x18,0x01,0xF8,0x00,0x01,0xFC,0x00,0xC0,0x01,0xFC,0xC0,0x00,0x70,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x60,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x10,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x06,0x00,0x00,0x00,0x1C,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x07,0x00,0x00,0x00,0x1C,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x06,0x00,0x00,0x00,0x0C,0xE0,0x00,0x01,0xE0,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x0E,0x00,0x00,0x00,0x3F,0xE0,0x00,0xFF,0xF0,0x00,0x38,0x00,0xE0,0x00,
0x00,0x00,0x0C,0x00,0x00,0x0F,0xFF,0x80,0x00,0xF8,0xF0,0x00,0x38,0x00,0xE0,0x00,
0x00,0x00,0x0C,0xF0,0x00,0x0F,0xC7,0x00,0x00,0x60,0xE0,0x00,0x38,0x00,0xE0,0x00,
0x00,0x00,0x1F,0xF0,0x00,0x01,0x8E,0x00,0x00,0x60,0xC0,0x00,0x70,0x01,0xC0,0x00,
0x00,0x07,0xFF,0x80,0x00,0x01,0x8C,0x00,0x00,0xE1,0x80,0x00,0x70,0x01,0xC0,0x00,
0x00,0x07,0xF8,0x00,0x00,0x01,0x98,0x00,0x00,0xDF,0xC0,0x00,0x70,0x01,0xC0,0x00,
0x00,0x00,0x78,0x00,0x00,0x01,0xBF,0xE0,0x00,0xFF,0x00,0x00,0x60,0x01,0x80,0x00,
0x00,0x00,0xFC,0x00,0x00,0x7F,0xFF,0xE0,0x00,0xC0,0x00,0x00,0xE0,0x03,0x80,0x00,
0x00,0x01,0xFE,0x00,0x00,0x7F,0xF8,0x00,0x00,0x00,0x00,0x00,0xC0,0x03,0x00,0x00,
0x00,0x03,0xB7,0x00,0x00,0x60,0x00,0x00,0x00,0x00,0x3C,0x00,0xC0,0x03,0x00,0x00,
0x00,0x07,0x67,0x00,0x00,0x60,0x00,0x00,0x03,0x9F,0xFE,0x00,0x80,0x02,0x00,0x00,
0x00,0x0E,0x63,0x80,0x00,0xE0,0x00,0x01,0xFF,0xCF,0x1E,0x01,0x80,0x06,0x00,0x00,
0x00,0x1C,0xE1,0xE0,0x00,0xC0,0x00,0x00,0xE3,0x9C,0x38,0x01,0x80,0x06,0x00,0x00,
0x00,0x38,0xC1,0xF8,0x01,0xC0,0x00,0x00,0xC3,0x18,0x30,0x00,0x00,0x00,0x00,0x00,
0x00,0xE0,0xFC,0xFE,0x03,0x80,0x00,0x01,0xC7,0x18,0x60,0x00,0x00,0x00,0x00,0x00,
0x01,0xDF,0xF8,0xFE,0x03,0x00,0x00,0x01,0x8E,0x1B,0xE0,0x07,0x00,0x1C,0x00,0x00,
0x07,0x07,0x80,0x00,0x07,0x00,0x00,0x01,0xFF,0x3F,0xE0,0x07,0x00,0x1C,0x00,0x00,
0x0C,0x03,0x80,0x00,0x0E,0x00,0x00,0x01,0xF0,0x38,0x00,0x0F,0x00,0x3C,0x00,0x00,
0x00,0x03,0x00,0x00,0x1C,0x00,0x00,0x01,0x00,0x20,0x00,0x06,0x00,0x18,0x00,0x00,
0x00,0x03,0x00,0x00,0x38,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x03,0x00,0x00,0xE0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x02,0x00,0x01,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
};
/******************************************************************************/
void Lcd_init(void) //初始化LCD
{
Delaynms(10); //启动等待,等LCM讲入工作状态
CS=1;
Write_char(0,0x30); //8 位介面,基本指令集
Write_char(0,0x0c); //显示打开,光标关,反白关
Write_char(0,0x01); //清屏,将DDRAM的地址计数器归零
}
/******************************************************************************/
void Write_char(bit start, unsigned char ddata) //写指令或数据
{
unsigned char start_data,Hdata,Ldata;
if(start==0)
start_data=0xf8; //写指令
else
start_data=0xfa; //写数据
Hdata=ddata&0xf0; //取高四位
Ldata=(ddata<<4)&0xf0; //取低四位
Send_byte(start_data); //发送起始信号
Delaynms(5); //延时是必须的
Send_byte(Hdata); //发送高四位
Delaynms(1); //延时是必须的
Send_byte(Ldata); //发送低四位
Delaynms(1); //延时是必须的
}
/******************************************************************************/
void Send_byte(unsigned char bbyte) //发送一个字节
{
unsigned char i;
for(i=0;i<8;i++)
{
SID=bbyte&0x80; //取出最高位
SCLK=1;
SCLK=0;
bbyte<<=1; //左移
}
}
/******************************************************************************/
void Delaynms(unsigned int di) //延时
{
unsigned int da,db;
for(da=0;da<di;da++)
for(db=0;db<10;db++);
}
/******************************************************************************/
void Disp_img(unsigned char *img) //图形方式12864显示字模221 横向取膜
{
unsigned char i,j;
unsigned int k = 0;
Write_char(0,0x36); //图形方式
for(i=0;i<32;i++)
{
Write_char(0,0x80+i);
Write_char(0,0x80);
for(j=0;j<16;j++)
{
Write_char(1,img[k++]);
}
}
for(i=0;i<32;i++)
{
Write_char(0,0x80+i);
Write_char(0,0x88);
for(j=0;j<16;j++)
{
Write_char(1,img[k++]);
}
}
}
/******************************************************************************/
void Clr_Scr(void)//清屏函数
{
Write_char(0,0x01);
}
/******************************************************************************/
void LCD_set_xy( unsigned char x, unsigned char y )
{ //设置LCD显示的起始位置,X为行,Y为列
unsigned char address;
switch(x)
{
case 0: address = 0x80 + y; break;
case 1: address = 0x80 + y; break;
case 2: address = 0x90 + y; break;
case 3: address = 0x88 + y; break;
case 4: address = 0x98 + y; break;
default:address = 0x80 + y; break;
}
Write_char(0, address);
}
/******************************************************************************/
void LCD_Write_string(unsigned char X,unsigned char Y,unsigned char *s)
{ // 中英文字符串显示函数
LCD_set_xy( X, Y );
while (*s)
{
Write_char( 1, *s );
s ++;
Delaynms(1);
}
}
/******************************************************************************/
void LCD_Write_number(unsigned char s)// 数字显示函数
{
Write_char(1,num[s]);
Delaynms(1);
}
/******************************************************************************/
void Lcd_Mark2(void)
{
Clr_Scr();//清屏
LCD_Write_string(1,0,znwk);//
LCD_Write_string(2,0,waves);//
LCD_Write_string(3,7,CM);//
}
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=time*1.87/100; //算出来是CM 11。0592M晶振
if(flag==1) //超出测量
{
flag=0;
LCD_set_xy( 3, 4 );
LCD_Write_number(13);
LCD_Write_number(12);
LCD_set_xy( 3, 5 );
LCD_Write_number(13);
LCD_Write_number(13);
}
else
{
disbuff[1]=S%1000/100;
disbuff[2]=S%1000%100/10;
disbuff[3]=S%1000%10 %10;
LCD_set_xy( 3, 4 );
LCD_Write_number(disbuff[1]);
LCD_Write_number(12);
LCD_set_xy( 3, 5 );
LCD_Write_number(disbuff[2]);
LCD_Write_number(disbuff[3]);
}
}
/********************************************************/
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
/********************************************************/
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
/********************************************************/
void StartModule() //T1中断用来扫描数码管和计800MS启动模块
{
TX=1; //800MS 启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
/********************************************************/
void main(void)
{
TMOD=0x01; //设T0为方式1,GATE=1
TH0=0;
TL0=0;
TR0=1;
Lcd_init(); //设置液晶显示器
Clr_Scr(); //清屏
Disp_img(logo); //显示欢迎使用本产品LOGO
Delaynms(1000);
Lcd_init(); //从图形显示状态下返回
Lcd_Mark2();
while(1)
{
StartModule();
//计算
while(!RX); //当RX为零时等待
TR0=1; //开启计数
while(RX); //当RX为1计数并等待
TR0=0; //关闭计数
Conut();
delayms(80); //80MS
}
} 5、超声波测距串口显示
/***********************************************************************************************************/
//HC-SR04 超声波测距模块 DEMO 程序
//晶振:11。0592
//接线:模块TRIG接 P1.2 ECH0 接P1.1
//串口波特率9600
/***********************************************************************************************************/
#include <AT89X51.H>
#include <intrins.h>
#include <STDIO.H>
#define uchar unsigned char
#define uint unsigned int
#define RX P1_1
#define TX P1_2
unsigned int time=0;
unsigned int timer=0;
float S=0;
bit flag =0;
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.87)/100; //算出来是CM
if(flag==1) //超出测量
{
flag=0;
printf("-----\n");
}
printf("S=%f\n",S);
}
/********************************************************/
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
/********************************************************/
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
/********************************************************/
void StartModule() //T1中断用来扫描数码管和计800MS启动模块
{
TX=1; //800MS 启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
/********************************************************/
void main(void)
{
TMOD=0x21; //设T0为方式1,GATE=1;
SCON=0x50;
TH1=0xFD;
TL1=0xFD;
TH0=0;
TL0=0;
TR0=1;
ET0=1; //允许T0中断
TR1=1; //开启定时器
TI=1;
EA=1; //开启总中断
while(1)
{
StartModule();
while(!RX); //当RX为零时等待
TR0=1; //开启计数
while(RX); //当RX为1计数并等待
TR0=0; //关闭计数
Conut(); //计算
delayms(100); //100MS
}
} 6、超声波测距数码管显示
/***********************************************************************************************************/
//hc-sr04 超声波测距模块 DEMO 程序
//晶振:11。0592
//接线:模块TRIG接 P0.2 ECH0 接P0.1
//数码管:共阳数码管P1接数据口,P2.5 P2.4 P2.3接选通数码管
/***********************************************************************************************************/
#include <AT89x51.H> //器件配置文件
#include <intrins.h>
#define RX P0_1
#define TX P0_2
unsigned int time=0;
unsigned int timer=0;
unsigned char posit=0;
unsigned long S=0;
bit flag =0;
unsigned char const discode[] ={ 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xBF,0xff/*-*/};
unsigned char const positon[3]={ 0xdf,0xef,0xf7};
unsigned char disbuff[4] ={ 0,0,0,0,};
/********************************************************/
void Display(void) //扫描数码管
{
if(posit==0)
{P1=(discode[disbuff[posit]])&0x7f;}
else
{P1=discode[disbuff[posit]];}
P2=positon[posit];
if(++posit>=3)
posit=0;
}
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.7)/100; //算出来是CM
if((S>=700)||flag==1) //超出测量范围显示“-”
{
flag=0;
disbuff[0]=10; //“-”
disbuff[1]=10; //“-”
disbuff[2]=10; //“-”
}
else
{
disbuff[0]=S%1000/100;
disbuff[1]=S%1000%100/10;
disbuff[2]=S%1000%10 %10;
}
}
/********************************************************/
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
/********************************************************/
void zd3() interrupt 3 //T1中断用来扫描数码管和计800MS启动模块
{
TH1=0xf8;
TL1=0x30;
Display();
timer++;
if(timer>=400)
{
timer=0;
TX=1; //800MS 启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
}
/*********************************************************/
void main( void )
{
TMOD=0x11; //设T0为方式1,GATE=1;
TH0=0;
TL0=0;
TH1=0xf8; //2MS定时
TL1=0x30;
ET0=1; //允许T0中断
ET1=1; //允许T1中断
TR1=1; //开启定时器
EA=1; //开启总中断
while(1)
{
while(!RX); //当RX为零时等待
TR0=1; //开启计数
while(RX); //当RX为1计数并等待
TR0=0; //关闭计数
Conut(); //计算
}
}
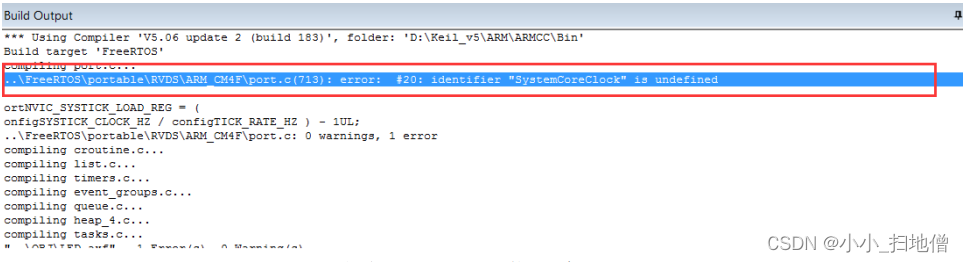
7、STM32串口显示
#include "stm32f10x.h"
#include <stdio.h>
#define TRIG_PIN GPIO_Pin_0
#define ECHO_PIN GPIO_Pin_1
void delay_us(uint32_t us) {
us *= (SystemCoreClock / 1000000) / 9;
while (us--) {
__NOP();
}
}
float measure_distance(void) {
GPIO_SetBits(GPIOA, TRIG_PIN);
delay_us(10);
GPIO_ResetBits(GPIOA, TRIG_PIN);
while (!GPIO_ReadInputDataBit(GPIOA, ECHO_PIN));
TIM_Cmd(TIM2, ENABLE);
while (GPIO_ReadInputDataBit(GPIOA, ECHO_PIN));
TIM_Cmd(TIM2, DISABLE);
uint16_t duration = TIM_GetCounter(TIM2);
float distance = duration * 0.017;
return distance;
}
int main(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = TRIG_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = ECHO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = SystemCoreClock / 1000000 - 1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
while (1) {
float distance = measure_distance();
printf("Distance: %.2f cm\n", distance);
// 延时一段时间,进行下一次测距
delay_us(100000);
}
}
四、结语
以上就是我对超声波模块驱动的分享,希望我的分享对你有所帮助!下面给读者提供一些资料,需要的读者可以私信我或者入群领取(815239036),收到私信后我会及时回复!









![[AutoSar]基础部分 RTE 06 对runnable的触发和SWC的影响](https://img-blog.csdnimg.cn/direct/e024d742dde34805b5d3838558556c2c.png)