引言:二维码识别与定位是指ROS通过创建AR标签并且对AR标签进行识别,标签可以由自己任意创建,具体方法会在文中给出,摄像头可以通过识别AR标签大小和姿态获取到标签对应的ID和位置等信息,实现识别与定位
注意:进行AR标签识别的时候,需要进行一些设置,主要是摄像头的校准和AR标签参数设置,完成这些步骤后才能拿到相对准确的位置信息
工作流程解析:
(1)、生成AR标签文件,并且打印出来,方便后续进行识别
(2)、启动摄像头
(3)、启动AR标签识别节点
一、使用ar-track-alvar创建二维码
创建三个二维码,边长8cm,二维码的内容分别为0、1、2
rosrun ar_track_alvar createMarker -s 8 0
rosrun ar_track_alvar createMarker -s 8 1
rosrun ar_track_alvar createMarker -s 8 2
在当前目录下查找创建的二维码文件并打印出来
二、启动摄像头识别二维码
roslaunch usb_cam usb_cam_test.launch
三、启动摄像头识别二维码
roslaunch robot_vision ar_track_camera.launch h
通过话题查看二维码的相对位置和对应的ID
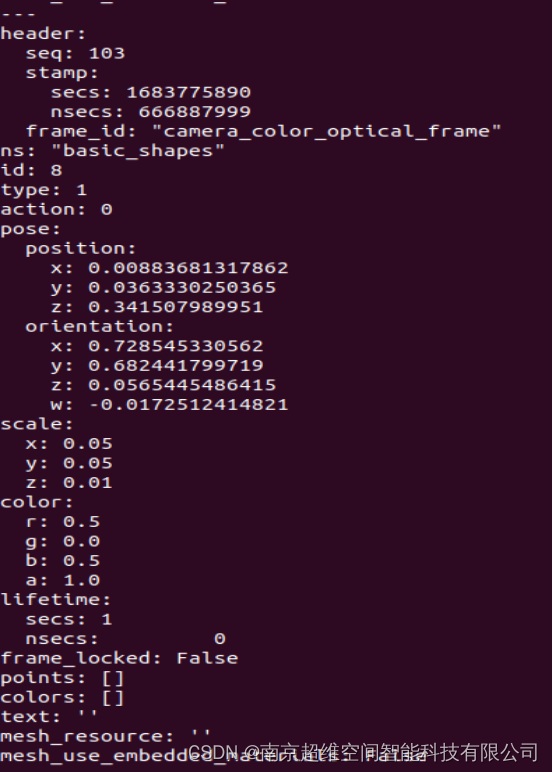
其中:
1、id:8则表示当前的二维码对应的序号是8
2、position则表示当前二维码相对于摄像头的位置
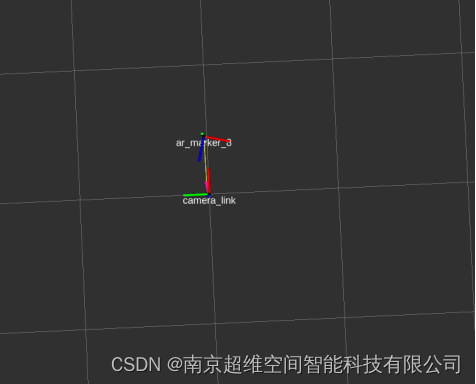
四、RVIZ查看二维码相对坐标位置
1、终端打开:rviz
2、查看TF坐标系即可








![[java小贴士]关于double类型进行运算时有误差的相等判断的替代方式](https://img-blog.csdnimg.cn/direct/eddee3f2b6c64d5db2afdcf17ecf7d5d.png)