文章目录
- 1、简述
- 2、效果图
- 2.1、命令行(不带GUI)
- 2.2、GUI(这里用的Qt)
- 3、串口硬件知识普及
- 4、核心实现
- 4.1、Qt的pro文件
- 4.2、main文件
- 4.3、SSerialPort类
- 4.3.1、头文件
- 4.3.2、源文件
- 4.4、Linux下的CMakeLists.txt
1、简述
本文主要讲述 C++开源库 CSerialPort 的使用,主要在Windows和Linux两个平台分别应用。
有需要了解 C++开源库 CSerialPort 的小伙伴,可以先去这边文章下了解下为什么要用 CSerialPort 和 CSerialPort 的介绍。
文章链接:【C/C++】轻量级跨平台 开源串口库 CSerialPort
2、效果图
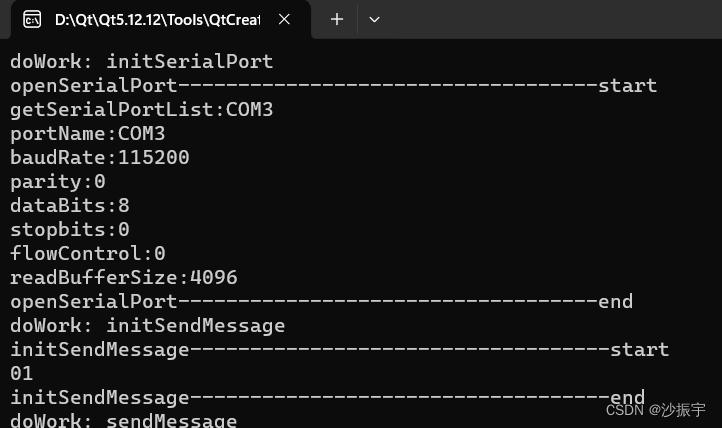
2.1、命令行(不带GUI)
Windows效果如下,Linux一样可以运行,只是串口名称不一样。因为还要切换系统,我就不截Linux图了
2.2、GUI(这里用的Qt)
放开pro里面的这两行即可,注释掉就是命令行,Windows效果图如下。Linux下这台没装Qt,没尝试,串口名称改下问题不大。
DEFINES += SHASHIDI_GUI
CONFIG += SHASHIDI_GUI

3、串口硬件知识普及
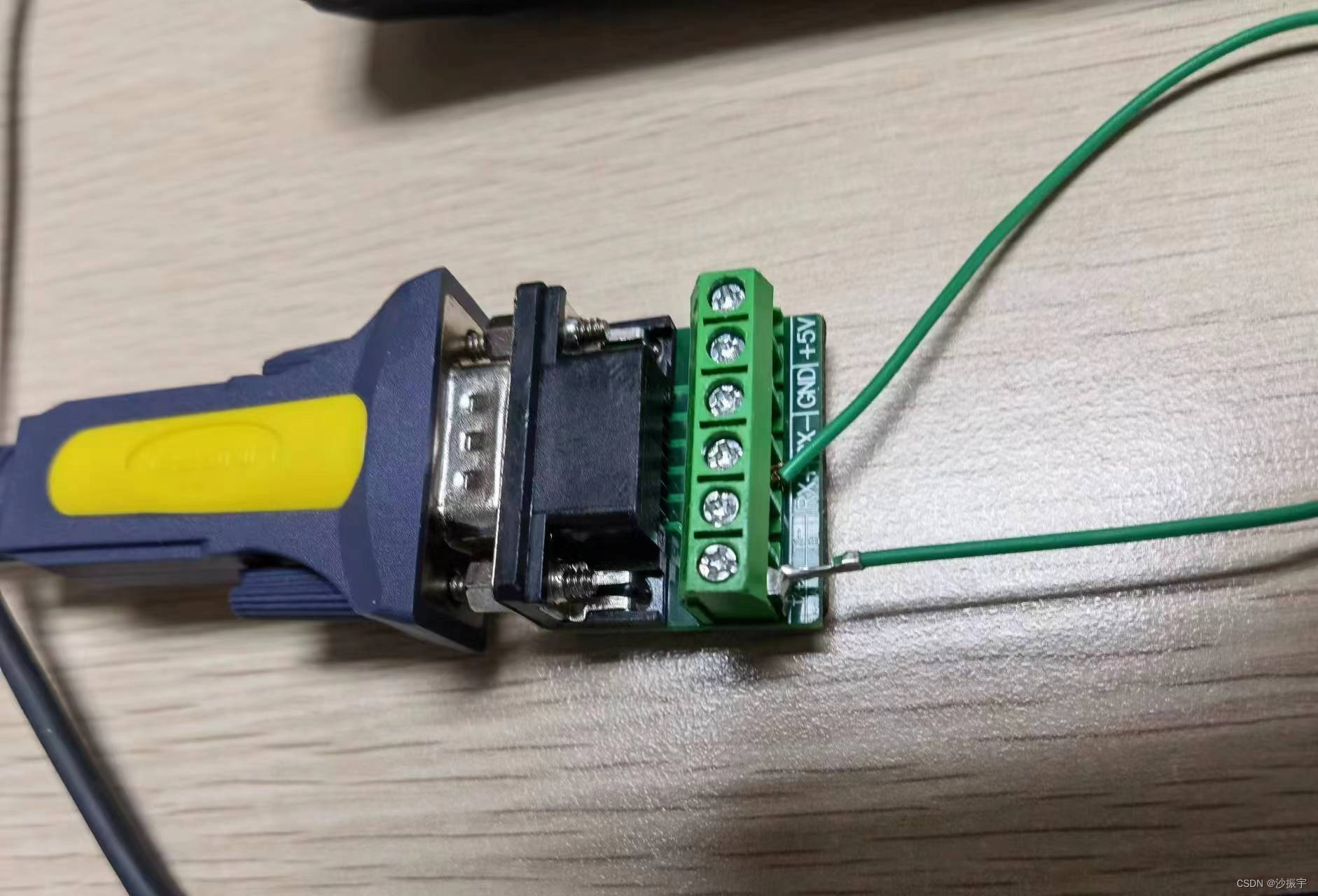
因为只测试串口的收发消息,把发送和接收的两个端口短接。找一个杜邦线直接串联起来就可以,这样发什么消息,就收到什么消息。如图是1口和3口短接。
4、核心实现
4.1、Qt的pro文件
Qt 的 pro 文件,如下。这里我用了一个宏来区分,一个是Pro的区分,一个是代码里面的区分
DEFINES += SHASHIDI_GUI
CONFIG += SHASHIDI_GUI
SHASHIDI_GUI{
QT += core gui
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
TARGET = Demo_SerialPort
SOURCES += main.cpp \
mainwindow.cpp
FORMS += \
mainwindow.ui
HEADERS += \
mainwindow.h
} else {
TARGET = Demo_SerialPort_Console
CONFIG += console c++11
CONFIG -= app_bundle
CONFIG -= qt
HEADERS += \
jsserialport.h
SOURCES += main.cpp \
jsserialport.cpp
}
TEMPLATE = app
DEFINES += _UNICODE
include($$PWD/CSerialPort/CSerialPort.pri)
win32*: {
#about windows reg
LIBS += $$PWD/CSerialPort/windows/x86/advapi32.lib
#about windows setupapi
LIBS += $$PWD/CSerialPort/windows/x86/setupapi.lib
}
CONFIG(debug, debug|release) {
DESTDIR = $$PWD/bin_debug
} else {
DESTDIR = $$PWD/bin_release
}
HEADERS += \
CommonSerialPort.h
4.2、main文件
#ifdef SHASHIDI_GUI
#include "mainwindow.h"
#include <QApplication>
#else
#include "jsserialport.h"
#include <iostream>
using namespace std;
#endif
#ifdef SHASHIDI_GUI
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
#else
int main()
{
JSSerialPort js;
js.doWork();
return 0;
#endif
}
4.3、SSerialPort类
4.3.1、头文件
#ifndef SSERIALPORT_H
#define SSERIALPORT_H
#include <iostream>
#include "CSerialPort/SerialPort.h"
#include "CSerialPort/SerialPortInfo.h"
#include "CommonSerialPort.h"
using namespace std;
using namespace itas109;
class SSerialPort : public CSerialPortListener
{
public:
SSerialPort();
// 工作
void doWork();
// 校验
void doCheck(char receiveBuf[], int receiveSize);
// 串口信号
bool m_flag_serialport = false;
// 发出消息
void sendMessage();
// 读取全部数据
void readAllData();
private:
// 获取端口列表
vector<SerialPortInfo> getSerialPortList();
// 打开串口
bool openSerialPort(const char *portName,
int baudRate = 9600,
itas109::Parity parity = itas109::Parity::ParityNone,
itas109::DataBits dataBits = itas109::DataBits::DataBits8,
itas109::StopBits stopbits = itas109::StopBits::StopOne,
itas109::FlowControl flowControl = itas109::FlowControl::FlowNone,
unsigned int readBufferSize = 4096, int timeout = 0);
// 关闭串口
void closeSerialPort();
// 收到消息
void onReadEvent(const char *portName, unsigned int readBufferLen);
// 设置串口模式 同步\异步
void setSync(bool isSync);
// 设置DTR
void setDTR(bool isDTR);
// 设置RTS
void setRTS(bool isRTS);
// 初始化串口
void initSerialPort();
// 初始化发送消息
void initSendMessage();
private:
CSerialPort m_SerialPort; // 串口
struct TERMINAL_TO_FIRECONTROL *m_terminal_to_firecontrol; // 终端到火控
struct FIRECONTROL_TO_TERMINAL *m_firecontrol_to_terminal; // 火控到终端
int m_packet_frame_count = 0; // 报文帧号累计
int m_buffer_size = 2048;
int m_frame_length = 34;
unsigned char m_firstChar = 161; // 0xA1
unsigned char m_secondChar = 177; // 0xB1
unsigned char m_thirdChar = 50; // 0x32
int m_tx = 0;
int m_rx = 0;
};
#endif // SSERIALPORT_H
4.3.2、源文件
#include "sserialport.h"
#include <iostream>
#include <iomanip>
SSerialPort::SSerialPort()
{
}
void SSerialPort::doWork()
{
cout << "doWork: initSerialPort" << endl;
initSerialPort();
cout << "doWork: initSendMessage" << endl;
initSendMessage();
cout << "doWork: sendMessage" << endl;
sendMessage();
cout << "doWork: readAllData" << endl;
readAllData();
}
void SSerialPort::doCheck(char receiveBuf[], int receiveSize)
{
cout << "doCheck: start" << receiveSize << endl;
for(int i = 0; i < receiveSize; i++) {
if( ( receiveSize - i ) < m_frame_length ) { //不足一帧则退出
break;
}
cout << "doCheck1: " << receiveBuf[i] << endl;
if( (receiveBuf[i] == m_secondChar) && (receiveBuf[i+1] == m_firstChar) ) { //发现帧头,取出一帧校验
cout << "doCheck: " << receiveBuf[i] << endl;
string aa(receiveBuf);
cout << "doCheck: " << aa << endl;
string tmp_s(aa, i, m_frame_length);
cout << "doCheck: " << tmp_s << endl;
int data = 0;
for(int i = 0; i < (m_frame_length - 1); i++) {
data = data + tmp_s[i];
}
unsigned char data1 = data & 0x7f;
if(data1 != tmp_s[m_frame_length - 1]) {
i = i + 1;
continue;
}
//校验通过,取值
m_firecontrol_to_terminal->send_address = tmp_s[0];
m_firecontrol_to_terminal->receive_address = tmp_s[1];
m_firecontrol_to_terminal->packet_length = tmp_s[2];
m_firecontrol_to_terminal->packet_frame_number_low = tmp_s[3];
m_firecontrol_to_terminal->packet_frame_number_high = tmp_s[4];
m_firecontrol_to_terminal->light_aiming_status_word_1.all = tmp_s[5];
m_firecontrol_to_terminal->light_aiming_status_word_2.all = tmp_s[6];
m_firecontrol_to_terminal->laser_ranging_distance_low = tmp_s[7];
m_firecontrol_to_terminal->laser_ranging_distance_high = tmp_s[8];
m_firecontrol_to_terminal->servo_status_word_1.all = tmp_s[9];
m_firecontrol_to_terminal->servo_status_word_2.all = tmp_s[10];
m_firecontrol_to_terminal->speed_of_chassis = tmp_s[11];
m_firecontrol_to_terminal->chassis_battery_power = tmp_s[12];
m_firecontrol_to_terminal->front_flip_arm_angle_low = tmp_s[13];
m_firecontrol_to_terminal->front_flip_arm_angle_high = tmp_s[14];
m_firecontrol_to_terminal->back_flip_arm_angle_low = tmp_s[15];
m_firecontrol_to_terminal->back_flip_arm_angle_high = tmp_s[16];
m_firecontrol_to_terminal->relay_status_word.all = tmp_s[17];
m_firecontrol_to_terminal->light_azimuth_position_low = tmp_s[18];
m_firecontrol_to_terminal->light_azimuth_position_high = tmp_s[19];
m_firecontrol_to_terminal->light_pitch_position_low = tmp_s[20];
m_firecontrol_to_terminal->light_pitch_position_high = tmp_s[21];
m_firecontrol_to_terminal->weapon_azimuth_position_low = tmp_s[22];
m_firecontrol_to_terminal->weapon_azimuth_position_high = tmp_s[23];
m_firecontrol_to_terminal->weapon_pitch_position_low = tmp_s[24];
m_firecontrol_to_terminal->weapon_pitch_position_high = tmp_s[25];
m_firecontrol_to_terminal->platform_pitch = tmp_s[26];
m_firecontrol_to_terminal->platform_roll_angle = tmp_s[27];
m_firecontrol_to_terminal->residual_bullet_low = tmp_s[28];
m_firecontrol_to_terminal->residual_bullet_high = tmp_s[29];
m_firecontrol_to_terminal->rsve1 = tmp_s[30];
m_firecontrol_to_terminal->rsve2 = tmp_s[31];
m_firecontrol_to_terminal->rsve3 = tmp_s[32];
m_firecontrol_to_terminal->check = tmp_s[33];
cout << "doCheck: send_address" << tmp_s << endl;
// emit sig_check(data1);
}
}
}
vector<SerialPortInfo> SSerialPort::getSerialPortList()
{
vector<SerialPortInfo> portNameList = CSerialPortInfo::availablePortInfos();
for (size_t i = 0; i < portNameList.size(); i++) {
cout << "getSerialPortList:" << portNameList[i].portName << endl;
}
if ( portNameList.size() == 0 ) {
cout << "getSerialPortList is Null" << endl;
}
return portNameList;
}
bool SSerialPort::openSerialPort(const char *portName, int baudRate, Parity parity, DataBits dataBits, StopBits stopbits, FlowControl flowControl, unsigned int readBufferSize, int timeout)
{
cout << "openSerialPort-----------------------------------start" << endl;
bool isOpen = false;
if(getSerialPortList().size() > 0) {
m_SerialPort.init(portName, baudRate, parity, dataBits, stopbits, flowControl, readBufferSize);
cout << "portName:" << portName << endl;
cout << "baudRate:" << baudRate << endl;
cout << "parity:" << parity << endl;
cout << "dataBits:" << dataBits << endl;
cout << "stopbits:" << stopbits << endl;
cout << "flowControl:" << flowControl << endl;
cout << "readBufferSize:" << readBufferSize << endl;
m_SerialPort.setReadIntervalTimeout(timeout);
isOpen = m_SerialPort.open();
if(!isOpen) {
cerr << "open port error" << m_SerialPort.getLastError() << m_SerialPort.getLastErrorMsg() << endl;
}
} else {
cerr << "This Computer no avaiable port!" << endl;
}
cout << "openSerialPort-----------------------------------end" << endl;
return isOpen;
}
void SSerialPort::closeSerialPort()
{
m_SerialPort.close();
}
void SSerialPort::onReadEvent(const char *portName, unsigned int readBufferLen)
{
cout << "onReadEvent:" << portName << readBufferLen << endl;
if(readBufferLen > 0) {
unsigned long recLen = 0;
char * str = NULL;
str = new char[readBufferLen];
recLen = m_SerialPort.readData(str, readBufferLen);
if(recLen > 0) {
// TODO: 中文需要由两个字符拼接,否则显示为空""
cout << "onReadEvent:" << portName << str << recLen << endl;
doCheck(str, recLen);
} else {
}
if(str) {
delete[] str;
str = NULL;
}
}
}
void SSerialPort::sendMessage()
{
char message[50];
if(m_SerialPort.isOpen()) {
// 伺服旋转限制
// 高位低位赋值
m_terminal_to_firecontrol->packet_frame_number_low = m_packet_frame_count & 0x00ff;
m_terminal_to_firecontrol->packet_frame_number_high = (m_packet_frame_count >> 8) & 0x00ff;
message[0] = m_firstChar;
message[1] = m_secondChar;
message[2] = m_thirdChar;
cout << "m_terminal_to_firecontrol->packet_frame_number_low: " << m_terminal_to_firecontrol->packet_frame_number_low << endl;
message[3] = m_terminal_to_firecontrol->packet_frame_number_low;
message[4] = m_terminal_to_firecontrol->packet_frame_number_high;
message[5] = m_terminal_to_firecontrol->light_aiming_control_word_1.all;//变化
message[6] = m_terminal_to_firecontrol->light_aiming_control_word_2.all;
message[7] = m_terminal_to_firecontrol->light_aiming_control_word_3.all;
message[8] = m_terminal_to_firecontrol->servo_control_word_1.all;
message[9] = m_terminal_to_firecontrol->servo_control_word_2.all;
message[10] = m_terminal_to_firecontrol->chassis_control_word_1.all;
message[11] = m_terminal_to_firecontrol->relay_control_word.all;
message[12] = m_terminal_to_firecontrol->light_azimuth_rotation_speed_low;
message[13] = m_terminal_to_firecontrol->light_azimuth_rotation_speed_high;
message[14] = m_terminal_to_firecontrol->light_pitch_rotation_speed_low;
message[15] = m_terminal_to_firecontrol->light_pitch_rotation_speed_high;
message[16] = m_terminal_to_firecontrol->fan_sweep_azimuth_setting_Angle;
message[17] = m_terminal_to_firecontrol->fan_sweep_azimuth_fu_setting_Angle;
message[18] = m_terminal_to_firecontrol->fan_sweep_pitch_setting_Angle;
message[19] = m_terminal_to_firecontrol->fan_sweep_pitch_fu_setting_Angle;
message[20] = m_terminal_to_firecontrol->quick_boot_azimuth_coordinates_low;
message[21] = m_terminal_to_firecontrol->quick_boot_azimuth_coordinates_high;
message[22] = m_terminal_to_firecontrol->quick_boot_pitch_coordinates_low;
message[23] = m_terminal_to_firecontrol->quick_boot_pitch_coordinates_high;
message[24] = m_terminal_to_firecontrol->left_track_speed_low;
message[25] = m_terminal_to_firecontrol->left_track_speed_high;
message[26] = m_terminal_to_firecontrol->right_track_speed_low;
message[27] = m_terminal_to_firecontrol->right_track_speed_high;
message[28] = m_terminal_to_firecontrol->forward_arm_speed;
message[29] = m_terminal_to_firecontrol->back_arm_speed;
message[30] = m_terminal_to_firecontrol->residual_low;
message[31] = m_terminal_to_firecontrol->residual_high;
message[32] = m_terminal_to_firecontrol->azimuth_correction;
message[33] = m_terminal_to_firecontrol->pitch_correction;
message[34] = m_terminal_to_firecontrol->delay_correction;
message[35] = m_terminal_to_firecontrol->light_aiming_control_word_4.all;
message[36] = m_terminal_to_firecontrol->light_aiming_control_word_5.all;
message[37] = m_terminal_to_firecontrol->servo_azimuth_rotation_speed_low;
message[38] = m_terminal_to_firecontrol->servo_azimuth_rotation_speed_high;
message[39] = m_terminal_to_firecontrol->servo_pitch_rotation_speed_low;
message[40] = m_terminal_to_firecontrol->servo_pitch_rotation_speed_high;
message[41] = m_terminal_to_firecontrol->firing_servo_start_low;
message[42] = m_terminal_to_firecontrol->firing_servo_start_high;
message[43] = m_terminal_to_firecontrol->firing_servo_stop_low;
message[44] = m_terminal_to_firecontrol->firing_servo_stop_high;
message[45] = m_terminal_to_firecontrol->firing_insurance_close_low;
message[46] = m_terminal_to_firecontrol->firing_insurance_close_high;
message[47] = m_terminal_to_firecontrol->firing_insurance_open_low;
message[48] = m_terminal_to_firecontrol->firing_insurance_open_high;
int data = 0;
for( int i = 0; i < 49; i++ ) {
cout << "sendMessage: " << message[i] << endl;
data = data + message[i];
}
message[49] = data & 0x7f;
int length = sizeof(message)/sizeof(char);
if( !m_flag_serialport ) {
// 支持中文并获取正确的长度
m_SerialPort.writeData(message, length);
} else {
}
if( m_packet_frame_count >= 0xffff ) {
m_packet_frame_count = 1;
} else {
m_packet_frame_count++;
}
cout << "sendMessage:" << message << " length: " << length << endl;
} else {
cerr << "please open serial port first!" << endl;
}
}
void SSerialPort::readAllData()
{
int recLen = 0;
char str[4096] = {0};
recLen = m_SerialPort.readAllData(str);
if(recLen > 0) {
// TODO: 中文需要由两个字符拼接,否则显示为空""
cout << "readAllData:" << str << " length: " << recLen << endl;
doCheck(str, recLen);
} else {
}
}
void SSerialPort::setSync(bool isSync)
{
if(isSync) {
m_SerialPort.setOperateMode(itas109::SynchronousOperate);
} else {
m_SerialPort.setOperateMode(itas109::AsynchronousOperate);
}
}
void SSerialPort::setDTR(bool isDTR)
{
m_SerialPort.setDtr(isDTR);
}
void SSerialPort::setRTS(bool isRTS)
{
m_SerialPort.setRts(isRTS);
}
void SSerialPort::initSerialPort()
{
#ifdef WIN32
this->openSerialPort("COM3", 115200, itas109::ParityNone,
itas109::DataBits8, itas109::StopOne);
#else
this->openSerialPort("/dev/ttyUSB0", 115200, itas109::ParityNone,
itas109::DataBits8, itas109::StopOne);
#endif
}
void SSerialPort::initSendMessage()
{
cout << "initSendMessage-----------------------------------start" << endl;
m_packet_frame_count = 1;
m_terminal_to_firecontrol = (struct TERMINAL_TO_FIRECONTROL*)malloc(sizeof(struct TERMINAL_TO_FIRECONTROL));
m_firecontrol_to_terminal = (struct FIRECONTROL_TO_TERMINAL*)malloc(sizeof(struct FIRECONTROL_TO_TERMINAL));
m_terminal_to_firecontrol->send_address = m_firstChar;
m_terminal_to_firecontrol->receive_address = m_secondChar;
m_terminal_to_firecontrol->packet_length = m_thirdChar;
m_terminal_to_firecontrol->packet_frame_number_low = 1;
std::cout << std::hex << std::setw(2) << std::setfill('0') << static_cast<int>(m_terminal_to_firecontrol->packet_frame_number_low)<<endl;
m_terminal_to_firecontrol->packet_frame_number_high = 0;
m_terminal_to_firecontrol->light_aiming_control_word_1.all = 0x01;
m_terminal_to_firecontrol->light_aiming_control_word_2.all = 0x00;
m_terminal_to_firecontrol->light_aiming_control_word_3.all = 0x00;
m_terminal_to_firecontrol->servo_control_word_1.all = 0x09;
m_terminal_to_firecontrol->servo_control_word_2.all = 0x02;
m_terminal_to_firecontrol->chassis_control_word_1.all = 0x00;
m_terminal_to_firecontrol->relay_control_word.all = 0x00;
m_terminal_to_firecontrol->light_azimuth_rotation_speed_low = 0x00;
m_terminal_to_firecontrol->light_azimuth_rotation_speed_high = 0X00;
m_terminal_to_firecontrol->light_pitch_rotation_speed_low = 0;
m_terminal_to_firecontrol->light_pitch_rotation_speed_high = 0;
m_terminal_to_firecontrol->fan_sweep_azimuth_setting_Angle = 0;
m_terminal_to_firecontrol->fan_sweep_azimuth_fu_setting_Angle = 0;
m_terminal_to_firecontrol->fan_sweep_pitch_setting_Angle = 0;
m_terminal_to_firecontrol->fan_sweep_pitch_fu_setting_Angle = 0;
m_terminal_to_firecontrol->quick_boot_azimuth_coordinates_low = 0;
m_terminal_to_firecontrol->quick_boot_azimuth_coordinates_high = 0;
m_terminal_to_firecontrol->quick_boot_pitch_coordinates_low = 0;
m_terminal_to_firecontrol->quick_boot_pitch_coordinates_high = 0;
m_terminal_to_firecontrol->left_track_speed_low = 0;
m_terminal_to_firecontrol->left_track_speed_high = 0;
m_terminal_to_firecontrol->right_track_speed_low = 0;
m_terminal_to_firecontrol->right_track_speed_high = 0;
m_terminal_to_firecontrol->forward_arm_speed = 0;
m_terminal_to_firecontrol->back_arm_speed = 0;
m_terminal_to_firecontrol->residual_low = 0;
m_terminal_to_firecontrol->residual_high = 0;
m_terminal_to_firecontrol->azimuth_correction = 0;
m_terminal_to_firecontrol->pitch_correction = 0;
m_terminal_to_firecontrol->delay_correction = 0;
m_terminal_to_firecontrol->light_aiming_control_word_4.all = 0;
m_terminal_to_firecontrol->light_aiming_control_word_5.all = 0;
m_terminal_to_firecontrol->servo_azimuth_rotation_speed_low = 0x00;
m_terminal_to_firecontrol->servo_azimuth_rotation_speed_high = 0x00;
m_terminal_to_firecontrol->servo_pitch_rotation_speed_low = 0;
m_terminal_to_firecontrol->servo_pitch_rotation_speed_high = 0;
m_terminal_to_firecontrol->firing_servo_start_low = 0;
m_terminal_to_firecontrol->firing_servo_start_high = 0;
m_terminal_to_firecontrol->firing_servo_stop_low = 0;
m_terminal_to_firecontrol->firing_servo_stop_high = 0;
m_terminal_to_firecontrol->firing_insurance_close_low = 0;
m_terminal_to_firecontrol->firing_insurance_close_high = 0;
m_terminal_to_firecontrol->firing_insurance_open_low = 0;
m_terminal_to_firecontrol->firing_insurance_open_high = 0;;
m_terminal_to_firecontrol->check = 0;
cout << "initSendMessage-----------------------------------end" << endl;
}
4.4、Linux下的CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(electro_optical_system)
## Compile as C++11, supported in ROS Kinetic and newer
add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
find_package(OpenCV REQUIRED)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES electro_optical_system
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/electro_optical_system.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/electro_optical_system_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_electro_optical_system.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
add_executable(EOS src/main.cpp src/jsserialport.cpp src/CSerialPort/SerialPort.cpp src/CSerialPort/SerialPortInfo.cpp src/CSerialPort/SerialPortUnixBase.cpp src/CSerialPort/SerialPortBase.cpp src/CSerialPort/SerialPortInfoUnixBase.cpp src/CSerialPort/SerialPortInfoBase.cpp)
target_link_libraries(EOS ${catkin_LIBRARIES}
${OpenCV_LIBS})
add_dependencies(EOS ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})




![【算法每日一练]-图论(保姆级教程篇14 )#会议(模板题) #医院设置 #虫洞 #无序字母对 #旅行计划 #最优贸易](https://img-blog.csdnimg.cn/direct/dc616bd3440146dca36838bed4baecc3.png)