在ROS中,相机作为一种重要的传感器设备被广泛应用于机器人视觉、导航定位、目标检测与识别等多种场景。
ROS提供了一系列工具和接口来支持不同类型的相机,包括USB摄像头、GigE Vision相机、FireWire相机以及深度相机(如Kinect或Intel RealSense系列)等。
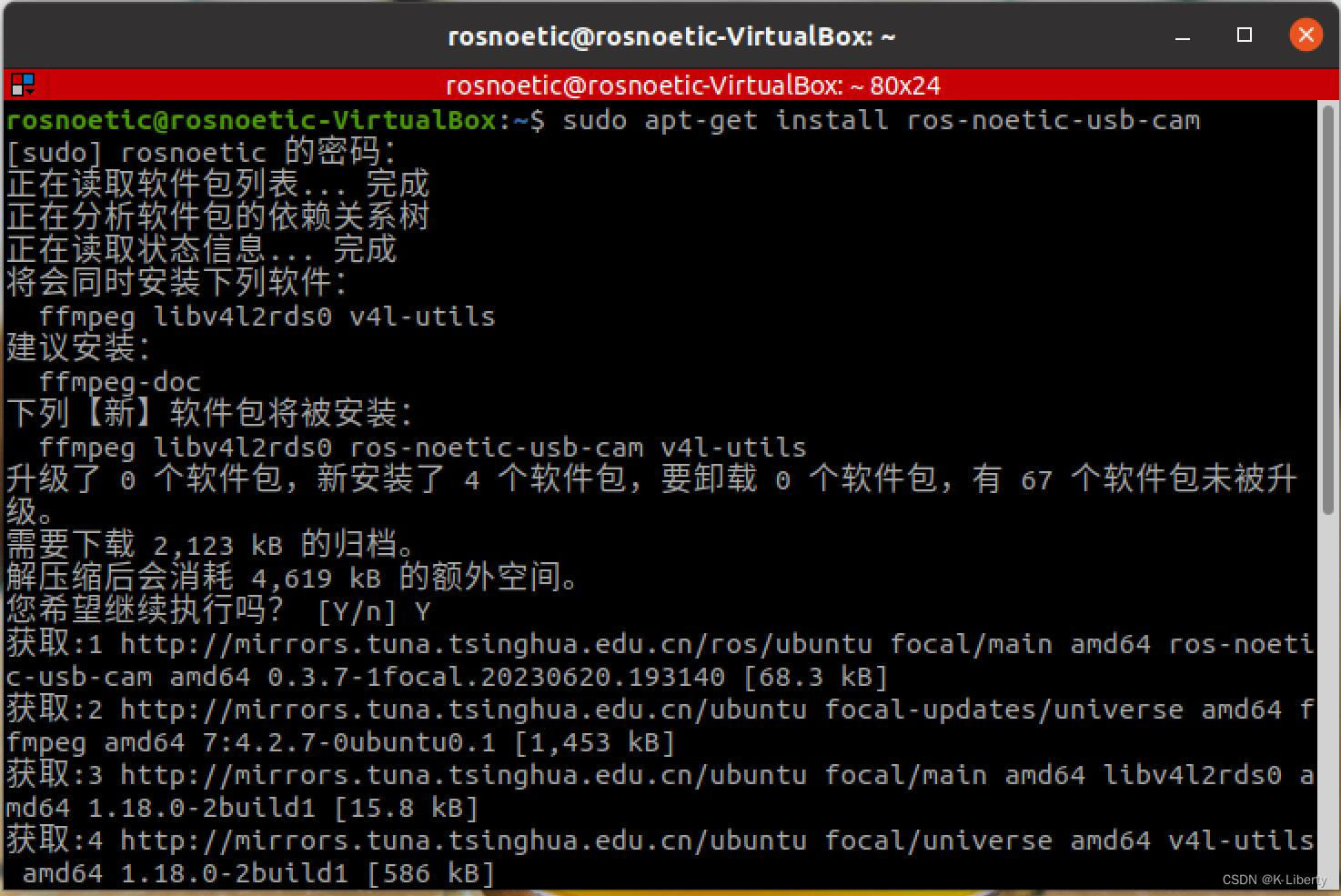
对于标准的USB相机,可以使用usb_cam或者camera_driver等ROS包来获取图像数据。
对于特定型号的相机,例如Kinect v1/v2或者RealSense系列相机,有专门的ROS驱动包如libfreenect、libfreenect2、realsense-ros等。
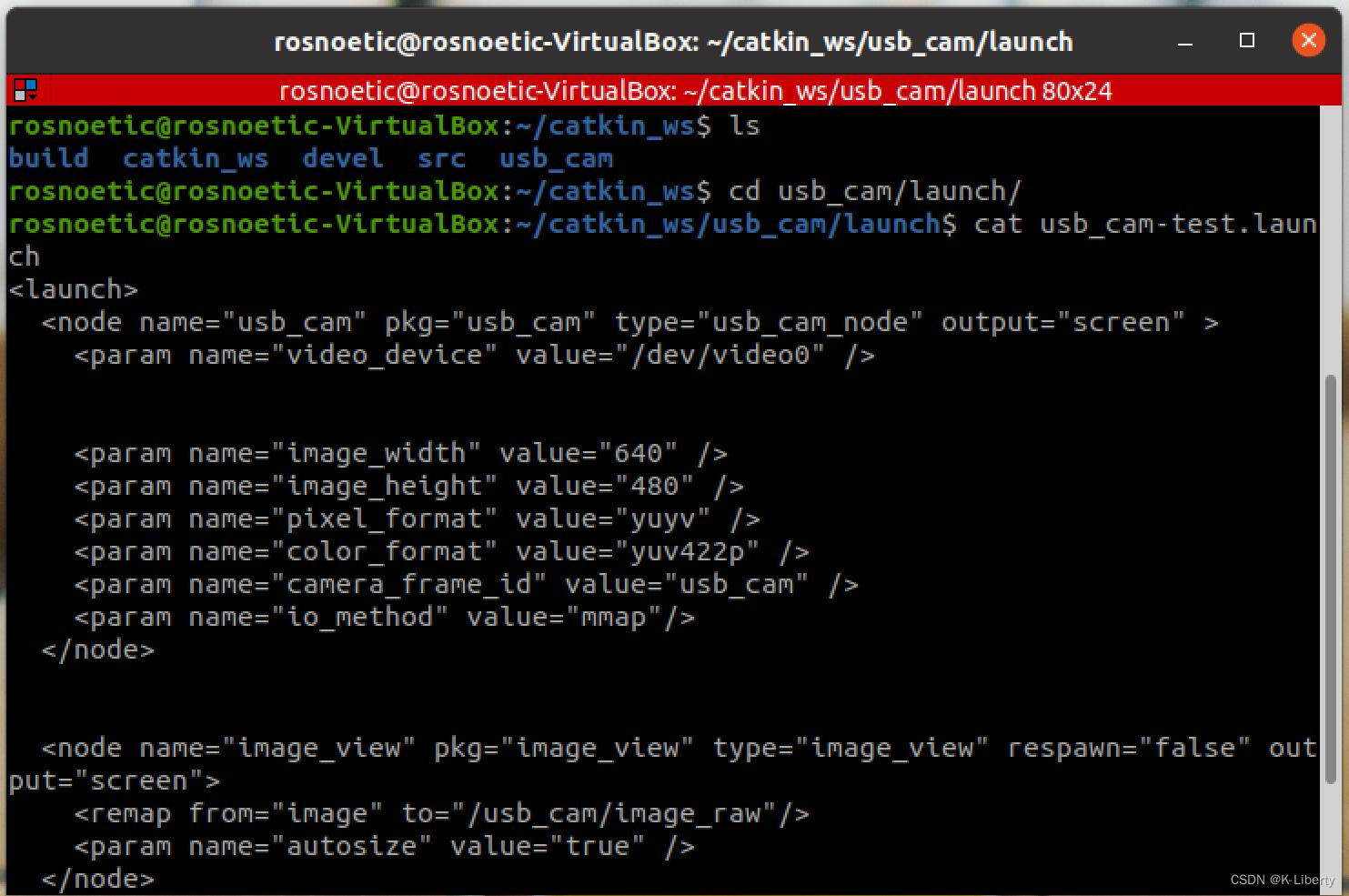
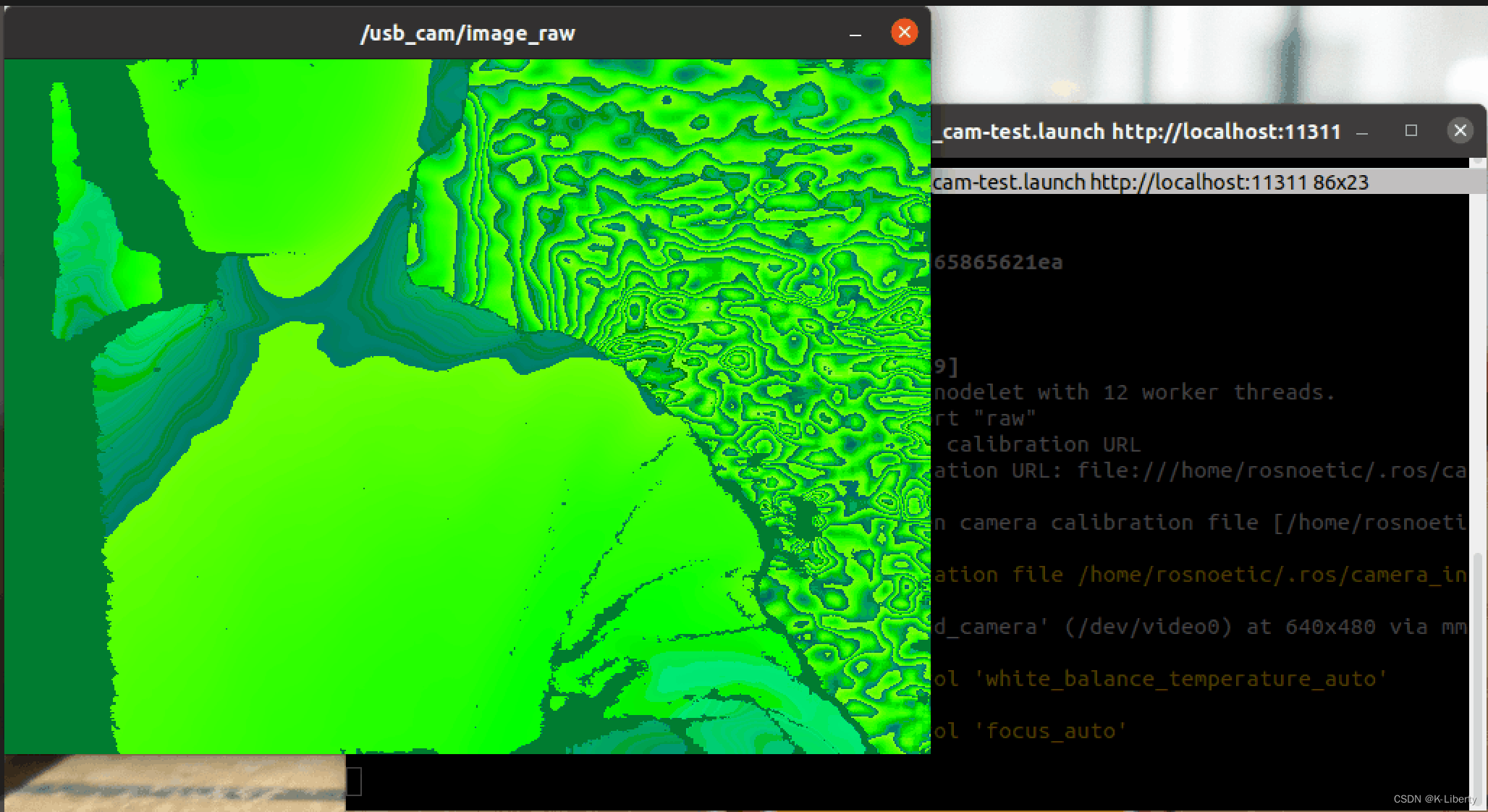
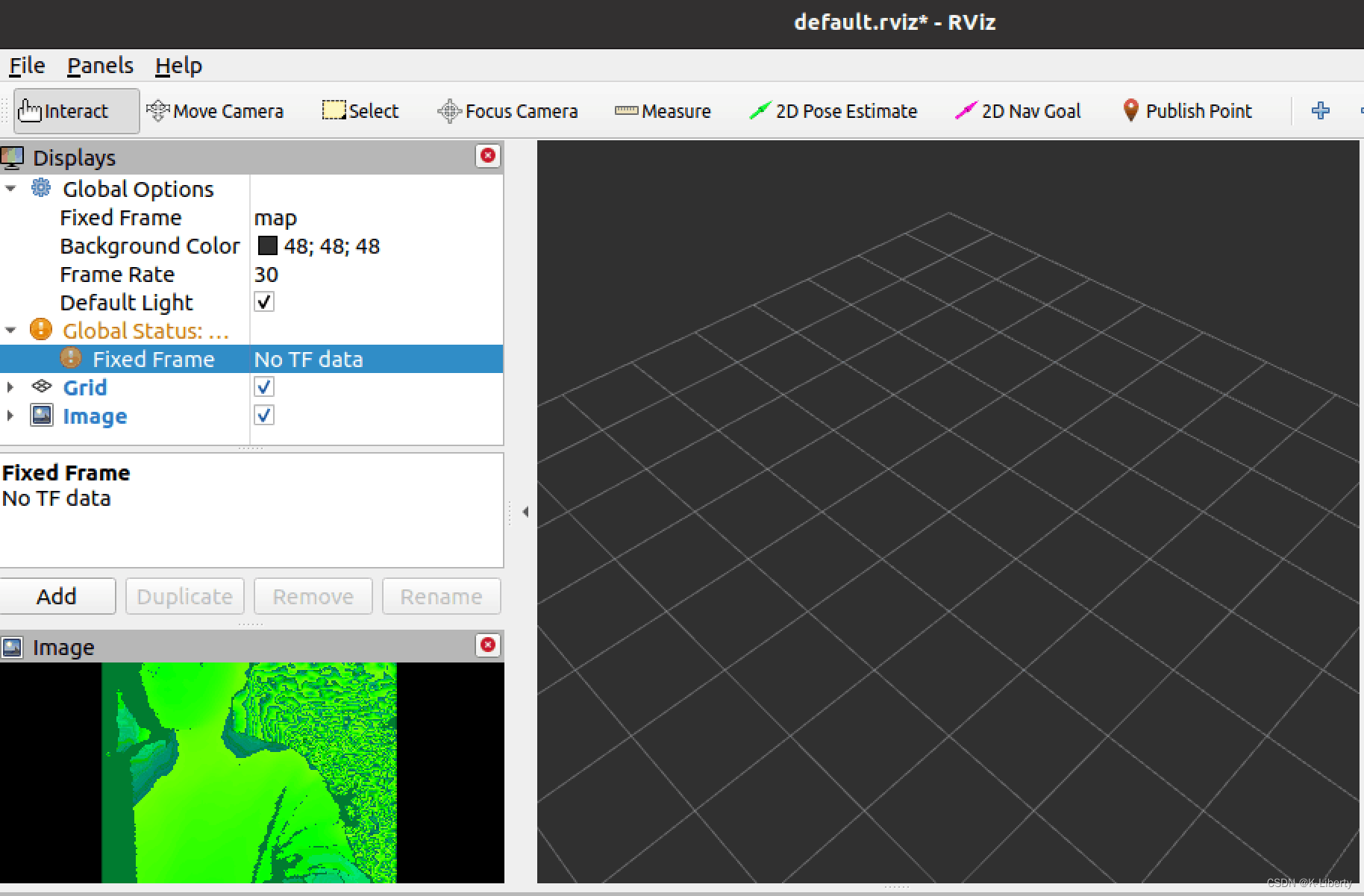
启动ROS节点以读取和发布相机数据流。如使用usb_cam,可以通过命令行运行roslaunch usb_cam usb_cam-test.launch,这会创建一个节点并发布话题(topic),通常是/image_raw用于原始图像数据。
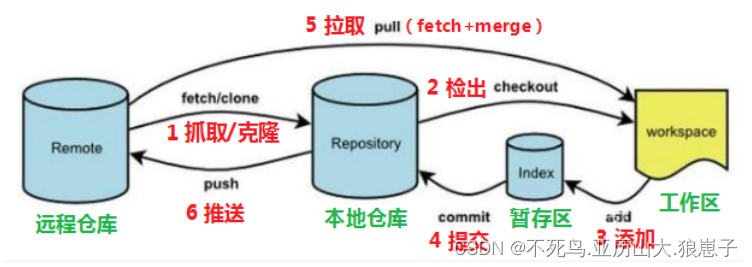
使用流程如下:







![[每周一更]-(第53期):Python3和Django环境安装并搭建Django](https://img-blog.csdnimg.cn/direct/770eee4533cd46fd873d72282dcb3083.jpeg#pic_center)