一、概念
图:记为G(V,E)
有向图:每条边都有方向
无向图:边无方向
完全图:每个顶点都与剩下的所有顶点相连
完全有向图有n(n-1)条边;完全无向图有n(n-1)/2条边
对于完全无向图,第一个节点与剩下n-1个节点相连,第二个与剩下n-2个相连……倒数第二个与最后一个相连,[(n-1)+(n-2)+......+1] = n*(n-1)/2
乘2得到完全有向图的边数
带权图:边上标有数值的图
连通图:任意两点都有路可走
要连通具有n个顶点的有向图,至少需要n条边。(构成环)
生成树:该树包含图的所有n个节点,树有n-1条边,将图连通。
如果添加一条边,必定出现环;
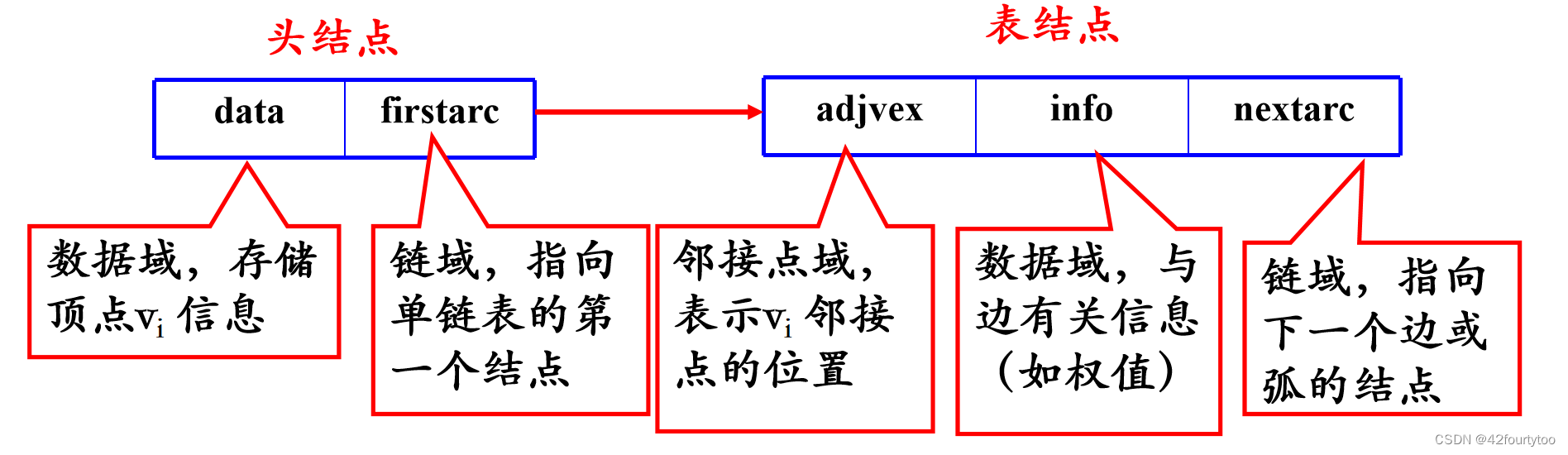
邻接点:一条边两端的点互为邻接点。
度:与点相连的边的条数为点的度;有向图中,从点发出的边数叫点的出度 ,在点终止的边数叫点的入度。
路径:从一个点沿着边走到另一个点,途径的顶点序列叫路径。
路径长度:非带权图的路径长度是指此路径上边的条数; 带权图的路径长度是指路径上各边的权之和。
二、图的存储结构
2.1邻接矩阵
建立一个长和宽都为顶点数的数组,用数组元素的值表示点之间的连接情况。
无向图:
- 点不相连为0,相连为1
- 无向图邻接矩阵对称
- 顶点i的度 = 第i行/列中,1的个数
有向图:
- 不对称
- 元素
为1,表明有一条点i指向点j的边(注意方向)
- 顶点i的出度 = 第i行中,1的个数
- 顶点i的入度 = 第i列中,1的个数
- 顶点i的度 = 第i行和第i列中,1的个数之和
带权图:
相当于把有向图的1换为边上的值
设图的邻接矩阵如下所示。各顶点的度依次是( )
A. 1 2 1 2
B. 2 2 1 1
C. 3 4 2 3
D. 4 4 2 2
答案:C 行和列的1求和
空间复杂度:n^2
代码:
int* adjacent_mat(int v, int e, int direct)
{
int* mat = (int*)malloc(sizeof(int) * v * v); //分配空间
if (!mat) return NULL;
int i, start, end, weight;
for (i = 0; i < v * v; i++)
mat[i] = INF; //节点全部初始化为无穷大(设无穷为65535)
for (i = 0; i < e; i++) //输入边信息
{
printf("输入起始 终止 权值:");
scanf_s("%d %d %d", &start, &end, &weight);
direct == 0 ? mat[start * v + end] = mat[end * v + start] = weight : mat[start * v + end] = weight; //direct=0时生成无向图,对称赋值;等于1生成有向图
}
for (i = 0; i < v * v; i++) {
mat[i] == INF ? printf("0 ") : printf("%d ", mat[i]);
if ((i + 1) % v == 0)
printf("\n");
}
return mat;
}2.2邻接表
适用于稀疏矩阵
对每个节点建立一个链表,把与之相连的点存入节点,连接起来
一个图的邻接矩阵唯一,邻接表不唯一
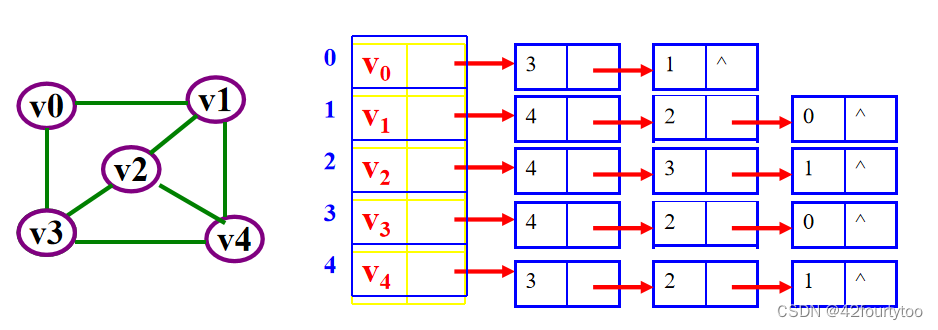
无向图的邻接表,顶点的度=该节点链表子结点个数:
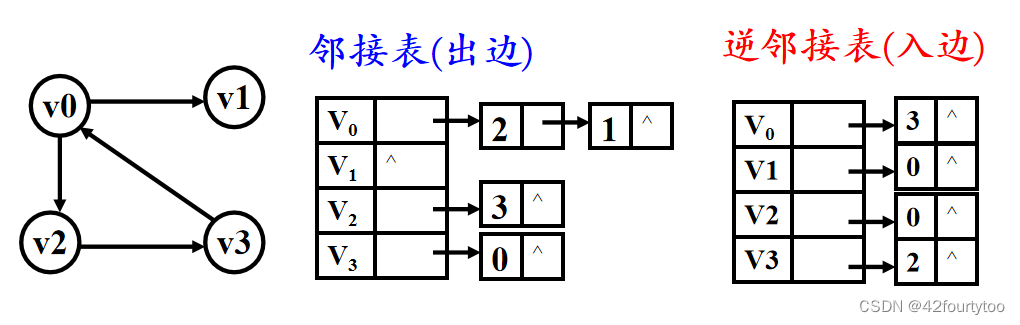
有向图的邻接表和逆邻接表:
空间复杂度(n+e) 点数加边数
代码:
node* adjacency_list(int v, int e, int direct)
{
headnode* headlist = (headnode*)malloc(sizeof(headnode) * v);
if (!headlist) return NULL;
int i;
for (i = 0; i < v; i++)
{
headlist[i].data = i;
headlist[i].next = NULL;
}
int start, end, weight;
node* p, * newnode;
for (i = 0; i < e; i++)
{
printf("输入起始 终止 权值:");
scanf_s("%d %d %d", &start, &end, &weight);
if (direct != 2)
{
newnode = (node*)malloc(sizeof(node));
newnode->adjvex = newnode->data = end;
newnode->next = NULL;
p = headlist[start].next;
if (!p) {
headlist[start].next = newnode;
}
else {
while ((p->next) != NULL)
p = p->next;
p->next = newnode;
}
}
if (direct == 0 || direct == 2)
{
newnode = (node*)malloc(sizeof(node));
newnode->adjvex = newnode->data = start;
newnode->next = NULL;
p = headlist[end].next;
if (!p) {
headlist[end].next = newnode;
}
else {
while ((p->next) != NULL)
p = p->next;
p->next = newnode;
}
}
}
for (i = 0; i < v; i++) {
printf("%d:", headlist[i].data);
p = headlist[i].next;
while (p) {
printf("%d ", p->data);
p = p->next;
}
printf("\n");
}
}2.3十字链表
考试没要求,先不写
三、图的遍历
图的遍历是从给定的源点出发,每个节点仅访问一次
基本算法有深度遍历和广度遍历两种
3.1深度优先DFS
沿着一条路一直走,没路了再回头找最近的分岔路口
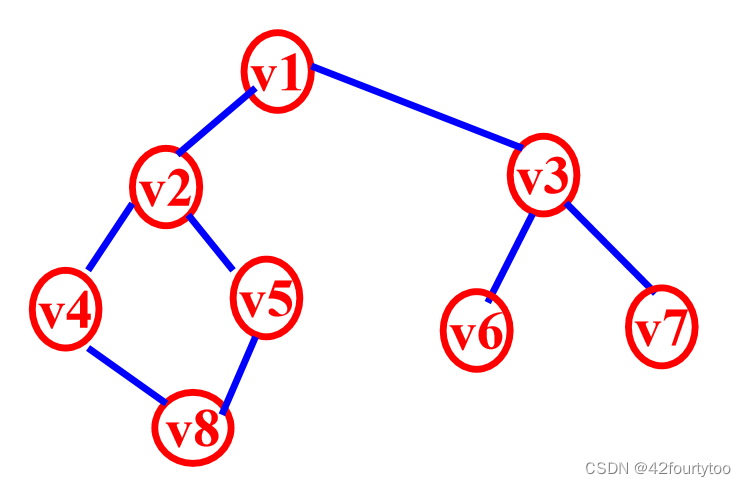
如上图,从v1开始DFS,可得到v1-v2-v4-v8-v5-v3-v6-v7
void DFS(int*mat, int v, int num, int*& visited) //深度优先,递归版。需要传入邻接矩阵,点数,起始点编号,已访问数组
{
printf("%d", num); //输出起始节点
visited[num] = 1; //标记起始节点
for (int i = 0; i < v; i++) //在起始节点这一行从头搜索未遍历过的邻接点,进行递归
if (!visited[i] && mat[num * v + i] != INF)
DFS(mat, v, i, visited);
}
void DFS2(int* mat, int v)
{
int head = 0, i;
int* stack = (int*)malloc(sizeof(int) * v); //创建栈
if (!stack) return;
int* visited = (int*)malloc(sizeof(int) * v); //创建标记数组,初始化为0
if (!visited) return;
for (i = 0; i < v; i++)
visited[i] = 0;
int num;
printf("输入开始节点编号:");
scanf_s("%d", &num);
//循环中,入栈在最后,所以先入栈一个点
stack[head++] = num; //入栈,标记, 输出
visited[num] = 1;
printf("%d", num);
int temp;
while (head) //栈空时结束
{
temp = stack[head - 1]; //获取栈顶
for (i = 0; i < v; i++) //对栈顶对应的邻接矩阵所在行进行遍历,有未标记且相邻的就赋值退出,找不到则退栈
{
if (visited[i] == 0 && mat[temp * v + i] != INF) {
temp = i;
break;
}
}
if (i == v) //找不到退栈,找到入栈
head--;
else {
stack[head++] = i;
visited[i] = 1;
printf("%d", i);
}
}
}
void DFS3(int* mat, int v)
{
int top = -1, i;
int* stack = (int*)malloc(sizeof(int) * v); //创建栈
if (!stack) return;
int* visited = (int*)malloc(sizeof(int) * v); //创建标记数组,初始化为0
if (!visited) return;
for (i = 0; i < v; i++) //标记数组初始化为0
visited[i] = 0;
int num;
printf("输入开始节点编号:");
scanf_s("%d", &num);
//循环中,入栈在最后,所以先入栈一个点
stack[++top] = num; //入栈,top指向栈顶元素
visited[num] = 1; //标记
int temp;
while (top >= 0) //栈空时结束
{
temp = stack[top]; //获取栈顶
printf("%d", temp);
for (i = 0; i < v; i++) //对栈顶对应的邻接矩阵所在行进行遍历,有未标记且相邻的就赋值退出,找不到则退栈
{
if (visited[i] == 0 && mat[temp * v + i] != INF) {
stack[++top] = i;
visited[i] = 1;
break;
}
}
if (i == v) //该节点所有相邻节点访问完毕,退栈
top--;
}
}3.2广度优先BFS
访问节点,把它的子节点全部访问,再依次访问子节点的全部子节点
时间复杂度:
DFS和BFS相同:
用邻接矩阵存储时,O(n^2)
用邻接表存储时,O(n+e)
四、最小生成树
生成树:是一个极小连通子图,它含有图中全部顶点,但只有n-1条边
最小生成树:各边权值之和最小的树
4.1PRIM普利姆算法
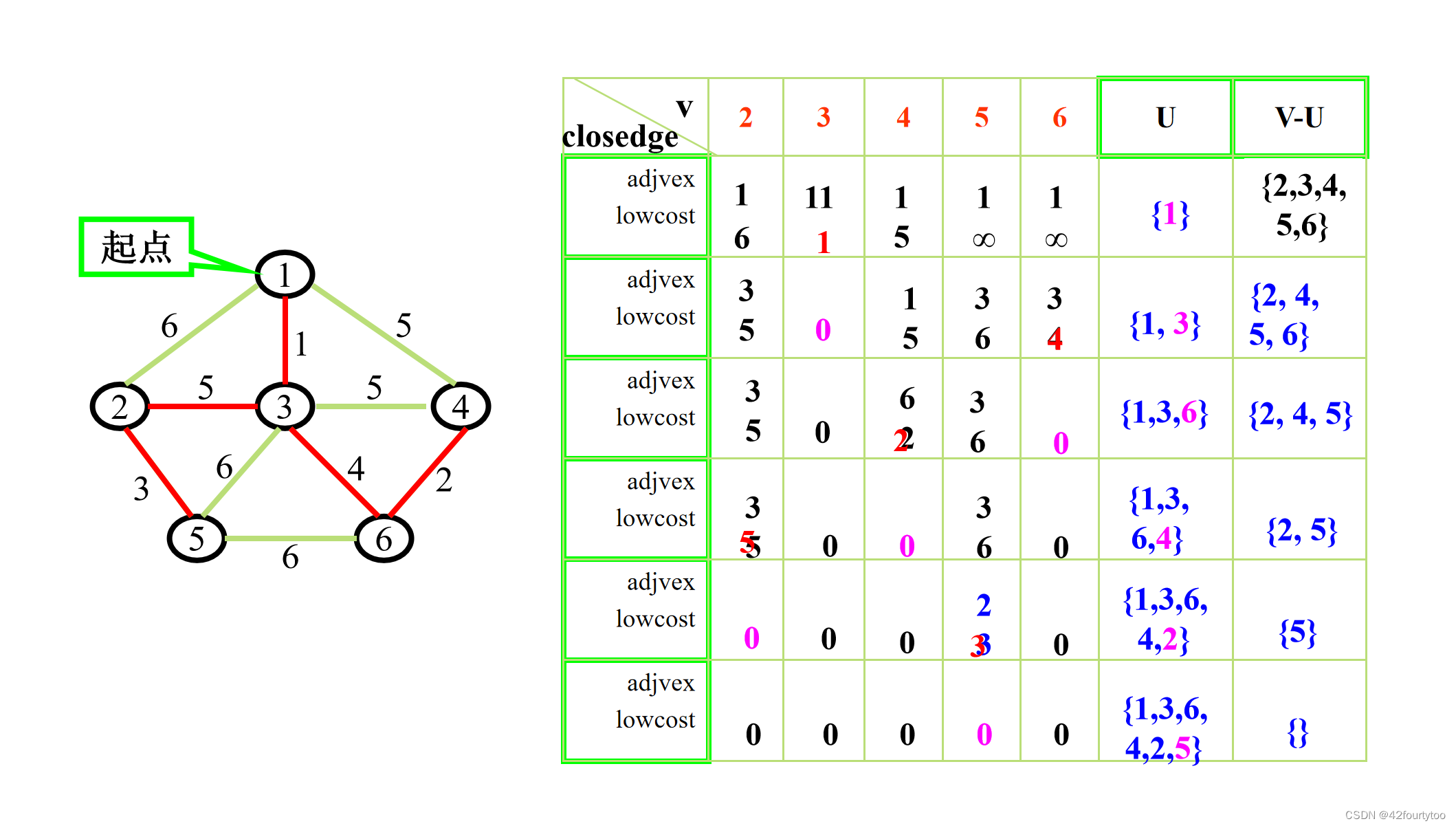
将所有点分为树U和图V两个集合,找到UV两个点集之间的权值最小边,把该边V中的点移到U里面,重复,直到V点全部到U里面
表格横表头为除起点外其他点、U集合、V-U集合;竖表头为lowcost:点到U集合的最小值,adjvex:最小值相连的点
每一次选出lowcost最小的加入U集合,然后用这个节点到其它节点的距离更新lowcost和adjvex;已确定的点写0
#include<stdio.h>
#include<stdlib.h>
#define INF 65535
typedef struct node {
int adjvex;
int data;
struct node* next;
}node;
typedef struct {
int data;
node* next;
}headnode;
int* adjacent_mat(int v, int e, int direct)
{
int* mat = (int*)malloc(sizeof(int) * v * v);
if (!mat) return NULL;
int i, start, end, weight;
for (i = 0; i < v * v; i++)
mat[i] = INF;
for (i = 0; i < e; i++)
{
printf("输入起始 终止 权值:");
scanf_s("%d %d %d", &start, &end, &weight);
direct == 0 ? mat[start * v + end] = mat[end * v + start] = weight : mat[start * v + end] = weight;
}
for (i = 0; i < v * v; i++) {
mat[i] == INF ? printf("0 ") : printf("%d ", mat[i]);
if ((i + 1) % v == 0)
printf("\n");
}
return mat;
}
void prim(int* mat, int v) //求最小生成树。始终寻找未标记点到已标记集合的最短距离;而迪杰斯特拉是寻找未标记点到源点的最短距离
{
int i, num, min, x, time = 0;
int* visited = (int*)malloc(sizeof(int) * v); //标记是否已遍历
if (!visited) return;
for (i = 0; i < v; i++)
visited[i] = 0;
int* lowcost = (int*)malloc(sizeof(int) * v); //lowcost为未标记点到已标记点集合的最小值,from为与之连接的点的编号
if (!lowcost) return;
int* from = (int*)malloc(sizeof(int) * v);
if (!from) return;
printf("输入起始节点:");
scanf_s("%d", &num);
visited[num] = 1;
time++;
for (i = 0; i < v; i++) {
lowcost[i] = mat[num * v + i];
from[i] = num;
}
while (time != v)
{
min = INF;
for (i = 0; i < v; i++) //找到距离最小点,传播
{
if (lowcost[i] < min && visited[i] != 1){
min = lowcost[i];
x = i;
}
}
printf("%d-%d\n", from[x], x);
visited[x] = 1;
//num = x;
time++;
for (i = 0; i < v; i++) //更新距离最小值
if (mat[x * v + i] < lowcost[i] && visited[i] != 1) {
lowcost[i] = mat[x * v + i];
from[i] = x;
}
}
}
int main() {
int v, e, direct;
printf("输入点数 边数:");
scanf_s("%d %d", &v, &e);
printf("无向图输入0,有向图输入1:");
scanf_s("%d", &direct);
int* admat = adjacent_mat(v, e, direct);
prim(admat, v);
}时间复杂度:O(n^2) 外层:为n个节点确定位置;内层:对于新确定的节点计算他和其他节点的距离
五、拓扑排序
1.选定一个没有直接前驱的点,输出
2.删除该起点和它相邻的边
3.重复1,2直到点全部输出,得到拓扑序列
如果还有未输出的节点,说明这些点都有直接前驱,即图中存在环
拓扑排序可以判断图是否有环
拓扑序列为:4 0 3 2 1 5

对上图进行拓补排序,可以得到不同的拓扑序列的个数是( )
答案:3
六、关键路径
顶点表示事件,有向边表示活动,边的权值表示完成活动所需时间,这样的网络叫AOE网
比如说,我们要完成一项工程,为了达到最终目标,我们要先完成许多小任务
事件最早发生时间VE:是到这一事件的最长路径。因为只有所有前期工作都做完了,这个事件才能发生,所以把前期工作完成需要的最长时间是该事件的最早发生时间。
- ve(源点)=0
- ve(k) = Max{ ve{j} + Weight(j, k) }, j为k的任意前提顶点, Weight(j, k)表示<j, k>边上的权值
事件的最晚发生时间VL:在完成总工程所需时间不变的情况下,一个事件最晚可以发生的时间。比如ab是c事件的前期工作,a花的时间比b长,由于c最早开始时间由最长的路径决定,所以b可以推迟一会再发生,也不会耽误总工期。
- vl(汇点) = ve(汇点)
- vl(k) = Min{ vl(j) - Weight(k, j) } ,k为j的任意前驱
边的最早开始时间E:即起始点的最早发生时间,事件一发生,活动就开始
边的最晚开始时间L:终点的最晚发生时间减去活动所需时间,由活动结束最晚时间倒退活动最晚开始时间
时间余量:活动的最早最晚开始时间之差,代表该活动最长拖延时间。如果该活动时间余量为0,说明为保证总时间,该活动不能拖延,称其为关键活动。把关键活动连起来得到关键路径
应用题模板:
写出点的ve和vl,边的权值、e和l
下列关于AOE网的叙述中,不正确的是( )。
A.关键活动不按期完成就会影响整个工程的完成时间
B.任何一个关键活动提前完成,那么整个工程将会提前完成
C.所有的关键活动提前完成,那么整个工程将会提前完成
D.某些关键活动提前完成,那么整个工程将会提前完成
答案:B 关键路径是网络中最长路径,表示完成工程的最短时间。关键活动延期,总工程延期;关键活动提前,总工程不一定提前,因为关键路径可能不止一条
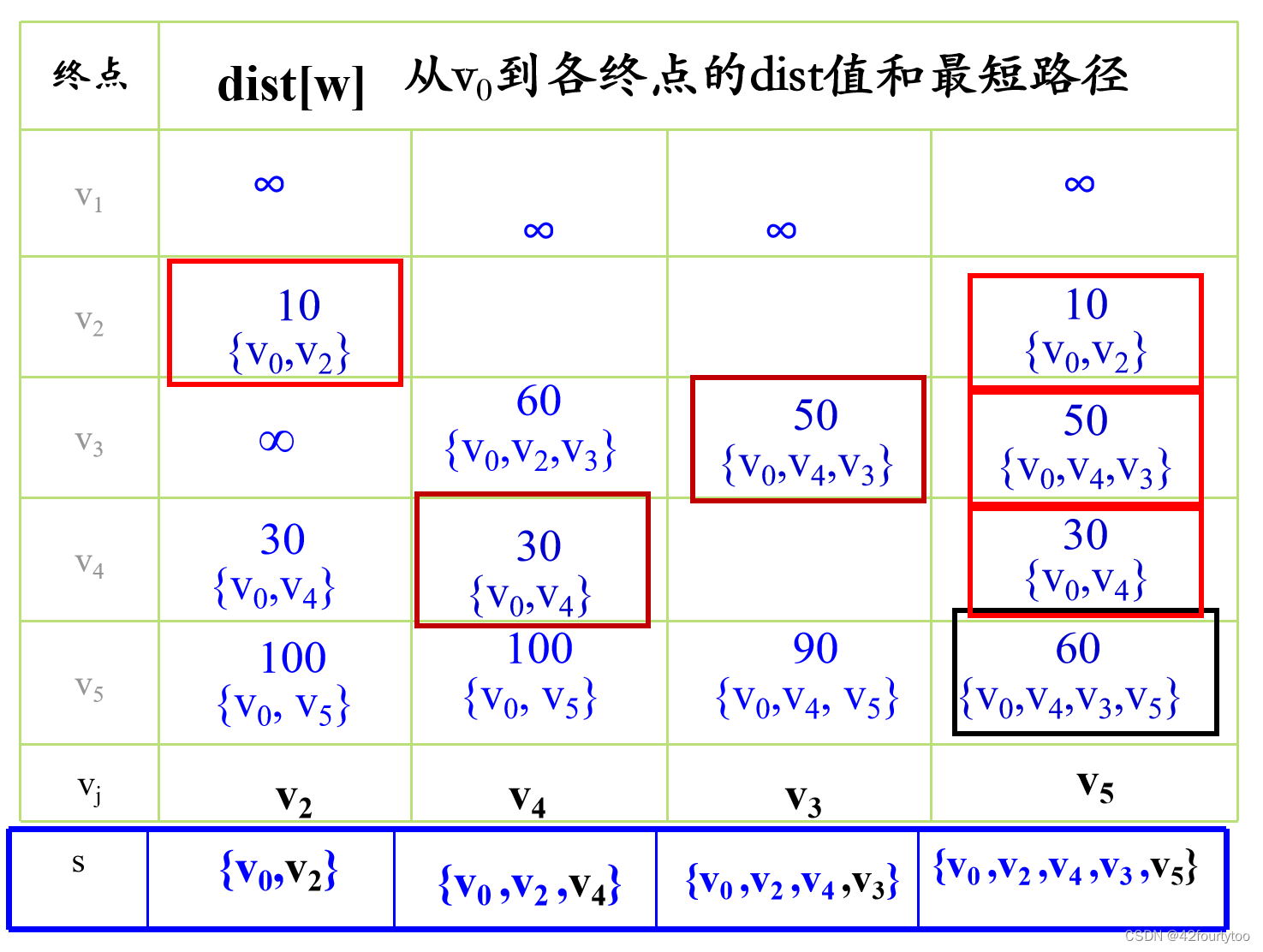
七、最短路径
迪杰斯特拉算法
用于求一个点到其它点的最短路径
找与起点相连的节点,更新距离和路径
找距离最小的节点,将其固定,更新为起点
应用题模板:
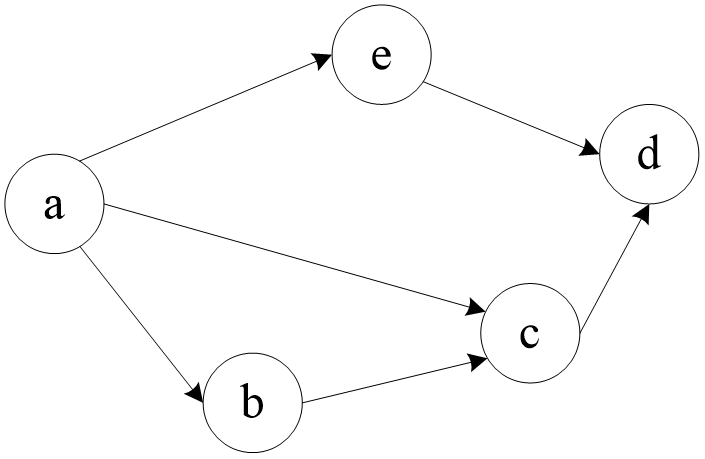
如下有向带权图,若采用迪杰斯特拉算法求源点a到其他各顶点的最短路径,得到的第一条最短路径的目标顶点是b,第二条最短路径的目标顶点是c,后续得到的其余各最短路径的目标顶点依次是()
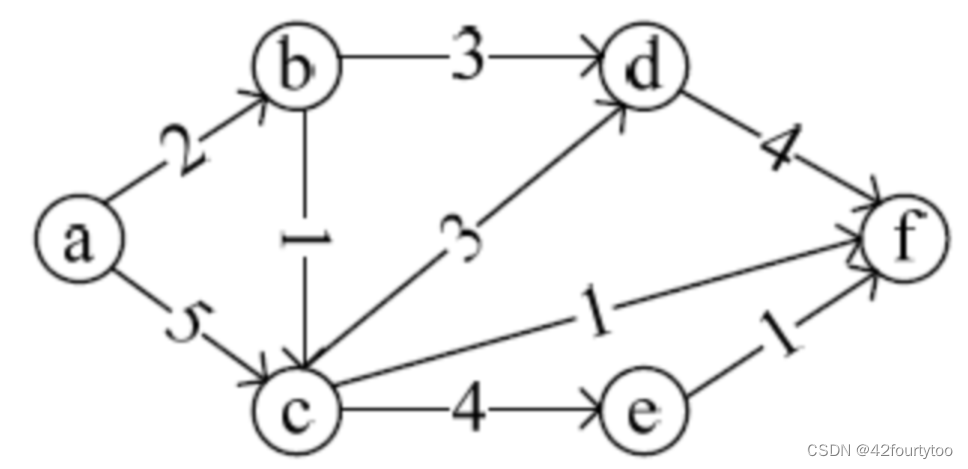
答案:fde
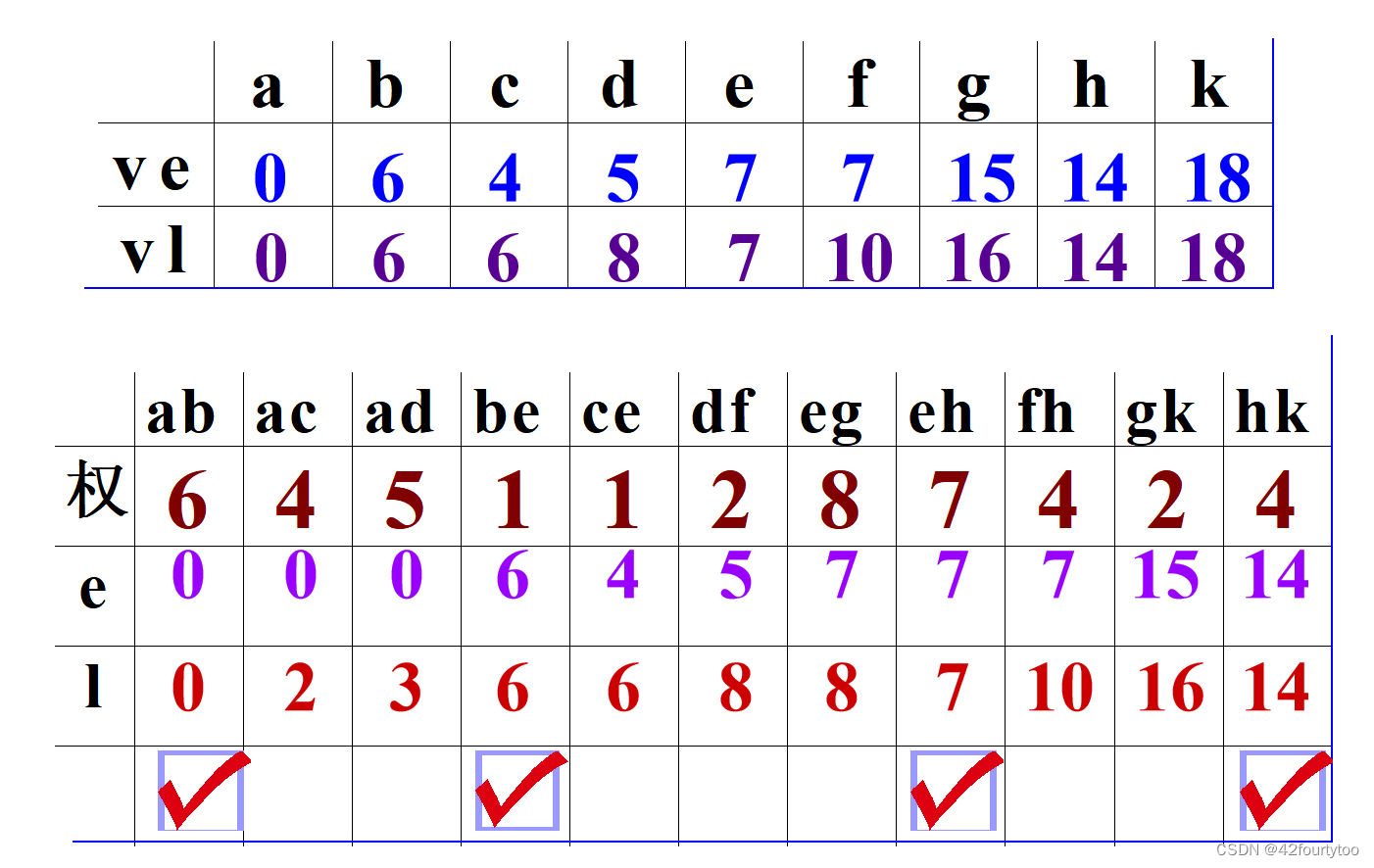
下列 AOE 网表示一项包含 8 个活动的工程。通过同时加快若干活动的进度可以缩短整个工程的工期。下列选项中,加快其进度就可以缩短工程工期的是( )
A. c 和 e
B. d 和 e
C. f 和 d
D. f 和 h
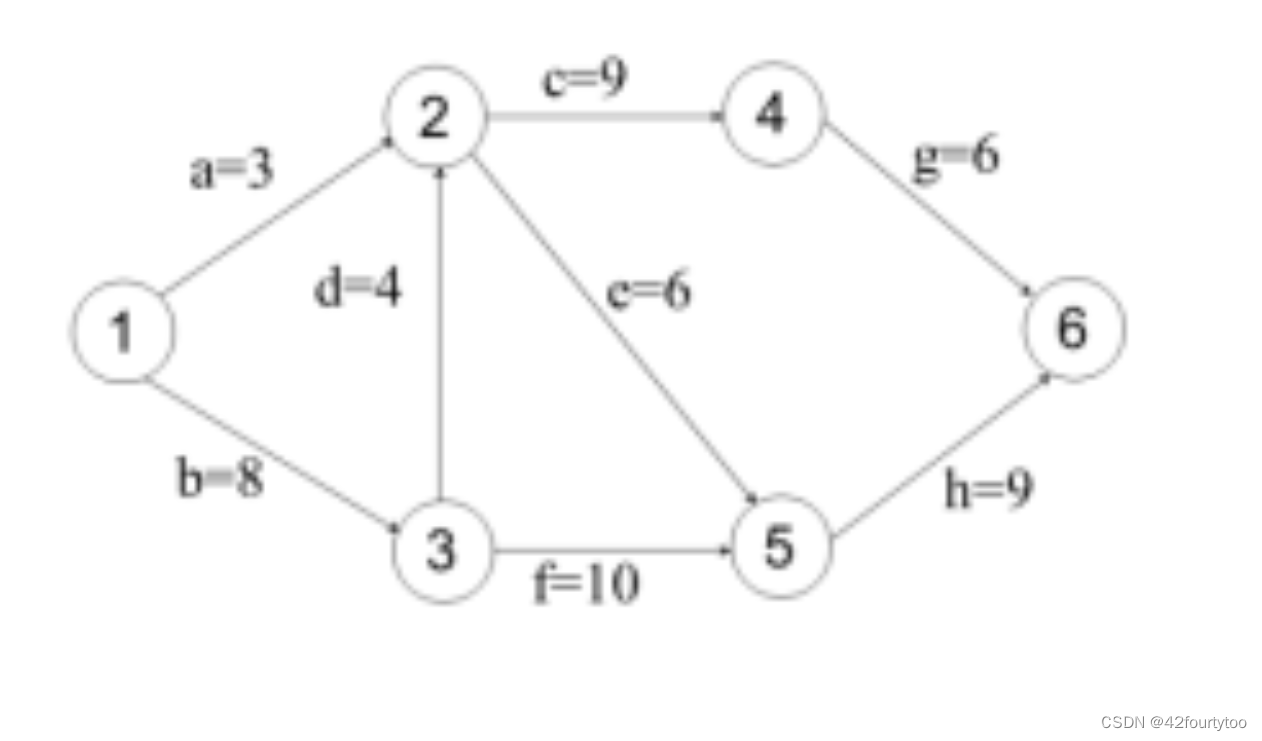
答案:C 根据图做出ve、vl表,再做出e、l表,找到关键路径。有bdcg、bdeh、bfh三条。要缩短总工期,三条关键路径都要缩短,只有C选项能同时影响三条路径。
从本题可以看出,只看点的ve=vl不能确定关键路径 ,必须看e=l
下列关于最小生成树的说法中,正确的是()。
Ⅰ.最小生成树的代价唯一
Ⅱ.所有权值最小的边一定会出现在所有的最小生成树中
Ⅲ.使用普里姆( Prim)算法从不同顶点开始得到的最小生成树一定相同
Ⅳ.使用普里姆算法和克鲁斯卡尔( Kruskal)算法得到的最小生成树总不相同A.仅Ⅰ
B.仅Ⅱ
C.仅Ⅰ、 Ⅲ
D.仅Ⅱ、 Ⅳ
答案:A 设想一个各边权值相等的树,则BCD错