讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文末正下方中心提供了本人
联系方式,
点击本人照片即可显示
W
X
→
官方认证
{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}
文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
上一篇博客中,首先介绍了 ValueConversionTables,其最终的目的是生成一个转换表,该转换的主要的功能是把 [ 0 , 1 ∽ 32767 ] [0,~1\backsim 32767] [0, 1∽32767] 的数值映射至 [ 0.9 , 0.1 ∽ 0.9 ] [0.9,~0.1\backsim 0.9] [0.9, 0.1∽0.9]。
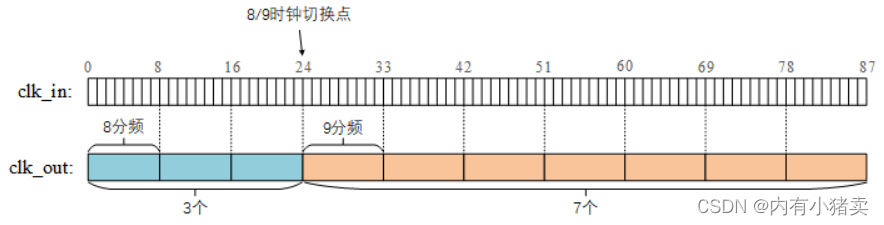
虽然后重点讲解 Grid2D::GrowLimits() 函数,该函数主要功能就是判断传入的 point 是否位目前的子图之中,如果不在,则会把地图扩大至原来的四倍,直到 point 处于子图之中。地图的扩增思路如下图所示:

最后,还留下了如下两个疑问:
疑问 1 \color{red} 疑问1 疑问1→为什么Grid2D::FinishUpdate()函数中,栅格值为什么需要减去 kUpdateMarker?
疑问 2 \color{red} 疑问2 疑问2→ known_cells_box_ 是什么时候更新,哪里会发生变化,其作用是什么?
那么该篇博客,看下在 ProbabilityGrid 这个类中是否能够找到相关的答案。ProbabilityGrid 是 Grid2D 的派生类,该类声明于 src/cartographer/cartographer/mapping/2d/probability_grid.h 文件中,可见其成员变量还是比较简单的,仅仅一个转换表 ValueConversionTables* conversion_tables_ 而已。下面就来看看 probability_grid.cc 文件中其成员函数的实现。
二、ProbabilityGrid
1、ProbabilityGrid::ProbabilityGrid()
其存在两个构造函数,一个是根据参数 const MapLimits& limits 与 ValueConversionTables* conversion_tables 实例化对象,另外一个是根据 proto::Grid2D 的配置参数构造对象。但是过程都比较简单,主要就是构建了一个 Grid2D 对象,然后把转换表赋值给了成员变量 conversion_tables_。
第一个构造函数在调用父类构造函数的时候,传入了参数 kMinCorrespondenceCost 与 kMaxCorrespondenceCost,着两个值都为常量,定义如下:
constexpr float kMinProbability = 0.1f; // 0.1
constexpr float kMaxProbability = 1.f - kMinProbability; // 0.9
constexpr float kMinCorrespondenceCost = 1.f - kMaxProbability; // 0.1
constexpr float kMaxCorrespondenceCost = 1.f - kMinProbability; // 0.9
kMinCorrespondenceCost 与 kMaxCorrespondenceCost 分别记录 Grid2D::correspondence_cost_cells_ 的最小值与最大值,当然指的是通过转换表映射之后的结果。
2、ProbabilityGrid::ProbabilityGrid()
从函数名可以直到,该函数的作用是设置栅格地图的概率概率值,第一个形参 cell_index 为 cell 的索引,第二个形参 probability 表示该 cell 被占用的机率。
其首先是通过 cell_index 获得该索引对应的cell,其是通过 mutable_correspondence_cost_cells() 函数获得,所以可以对该cell 的栅格值进行修改。不过由于 probability 表示该 cell 被占用的机率,所以这里调用了 ProbabilityToCorrespondenceCost() 函数,实际上就是 1-probability,获得未被占用的概率。然后再调用 CorrespondenceCostToValue() 函数,该函数的作用是把 [ 0.9 , 0.1 ∽ 0.9 ] [0.9,~0.1\backsim 0.9] [0.9, 0.1∽0.9] 的数值映射至 [ 0 , 1 ∽ 32767 ] [0,~1\backsim 32767] [0, 1∽32767],可以看做是转换表的逆操作。
因为对该 cell 被重新设置,说明其已经被探索到,即其是已知的了,所以通过 mutable_known_cells_box 函数把 cell 的二维索引(也可以看作是像素坐标)添加至 known_cells_box_ 之中。代码注释如下:
// Sets the probability of the cell at 'cell_index' to the given
// 'probability'. Only allowed if the cell was unknown before.
// 将 索引 处单元格的概率设置为给定的概率, 仅当单元格之前处于未知状态时才允许
void ProbabilityGrid::SetProbability(const Eigen::Array2i& cell_index,
const float probability) {
// 获取对应栅格的引用
uint16& cell =
(*mutable_correspondence_cost_cells())[ToFlatIndex(cell_index)];
CHECK_EQ(cell, kUnknownProbabilityValue);
// 为栅格赋值 value
cell =
CorrespondenceCostToValue(ProbabilityToCorrespondenceCost(probability));
// 更新bounding_box
mutable_known_cells_box()->extend(cell_index.matrix());
}
3、ProbabilityGrid::ApplyLookupTable()
从该函数的命名来看,叫做应用查询表,那么其是如何应用的,且作用是什么呢?该函数的主要逻辑如下:
( 1 ) \color{blue}(1) (1) 其传入的参数 cell_index 与上一函数相同,通过该索引可以获得 correspondence_cost_cells_ 中对应的 cell。;另一参数 table 就是查询表,通过该查询表可以可以把 [ 0 , 1 ∽ 32767 ] [0,~1\backsim 32767] [0, 1∽32767] 的数值映射到 [ 0.9 , 0.1 ∽ 0.9 ] [0.9,~0.1\backsim 0.9] [0.9, 0.1∽0.9]。
( 2 ) \color{blue}(2) (2) 该函数首先判断一下查询表 table 的大小,需要保证其为 kUpdateMarker=32768,否则报错。然后把二维 cell_index 变换成一维索引 flat_index。然后调用 mutable_correspondence_cost_cells() 函数,再借助 flat_index 获得其对应的 cell。判断一下 *cell >= kUpdateMarker 是否成立,如果成立表示该 cell 已经更新过了,无需再次更新,同时返回 false。
( 3 ) \color{blue}(3) (3) 该 cell 没有更新过,则通过 mutable_update_indices() 函数把 flat_index 添加到 update_indices_ 之中,表示该 cell 已经更新过了,然后再对其进行更新。更新的操作为 : *cell = table[*cell],其更新的操作比较怪→ 疑问 1 \color{red} 疑问1 疑问1
( 4 ) \color{blue}(4) (4) 如果当前的 cell 更新了,说明该 cell 已经探索到,属于已知的 cell,通过 mutable_known_cells_box() 函数把其像素坐标添加到 known_cells_box_ 之中。
该函数的代码注释如下:
// Applies the 'odds' specified when calling ComputeLookupTableToApplyOdds()
// to the probability of the cell at 'cell_index' if the cell has not already
// been updated. Multiple updates of the same cell will be ignored until
// FinishUpdate() is called. Returns true if the cell was updated.
// 如果单元格尚未更新,则将调用 ComputeLookupTableToApplyOdds() 时指定的 'odds' 应用于单元格在 'cell_index' 处的概率
// 在调用 FinishUpdate() 之前,将忽略同一单元格的多次更新。如果单元格已更新,则返回 true
//
// If this is the first call to ApplyOdds() for the specified cell, its value
// will be set to probability corresponding to 'odds'.
// 如果这是对指定单元格第一次调用 ApplyOdds(),则其值将设置为与 'odds' 对应的概率
// 使用查找表对指定栅格进行栅格值的更新
bool ProbabilityGrid::ApplyLookupTable(const Eigen::Array2i& cell_index,
const std::vector<uint16>& table) {
DCHECK_EQ(table.size(), kUpdateMarker);
const int flat_index = ToFlatIndex(cell_index);
// 获取对应栅格的指针
uint16* cell = &(*mutable_correspondence_cost_cells())[flat_index];
// 对处于更新状态的栅格, 不再进行更新了
if (*cell >= kUpdateMarker) {
return false;
}
// 标记这个索引的栅格已经被更新过
mutable_update_indices()->push_back(flat_index);
// 更新栅格值
*cell = table[*cell];
DCHECK_GE(*cell, kUpdateMarker);
// 更新bounding_box
mutable_known_cells_box()->extend(cell_index.matrix());
return true;
}
该函数中,比较难理解的点 *cell = table[*cell]; 这句代码了,为了方便理解,打印了变量 flat_index、以及更新之前与更新之后的 *cell。如下:
flat_index 250643 ...... 267468 249052 ...... 250643 251439
*cell(更新之前) 0 ...... 16794 16794 ...... 14336 16794
*cell(更新之后) 47104 ...... 47511 47511 ...... 45097 47511
这里并没有看出什么,但是比较奇怪的是查询表并非从0开始的,如下图所示,确实比较出乎意料,不过没有关系,后续看下该函数是如何被调用的,然后再来分析出现该现象的原因。

5、ProbabilityGrid::GetProbability()
该函数较为简单,其就是传入一个cell索引值,








![[Java]JDBC学习笔记(尚硅谷康师傅JDBC)](https://img-blog.csdnimg.cn/008b18298d604692a3e3a42573421632.png)