正点原子B站视频地址:https://www.bilibili.com/video/BV1bv4y1R7dp?p=1&vd_source=cc0e43b449de7e8663ca1f89dd5fea7d
目录
- 单片机简介
- Cortex-M介绍
- 初识STM32
- STM32命名规则
- STM32 选型
- STM32 设计
- 数据手册
- 最小系统
- IO 分配
- STM32启动过程分析
- 启动模式
- 启动文件分析
- 启动文件中的一些指令
- 启动文件代码讲解
- 系统启动流程
- map 文件分析
- MDK 编译生成文件简介
- map 文件分析
- map 文件的MDK 设置
- map 文件的基础概念
- map 文件的组成部分说明
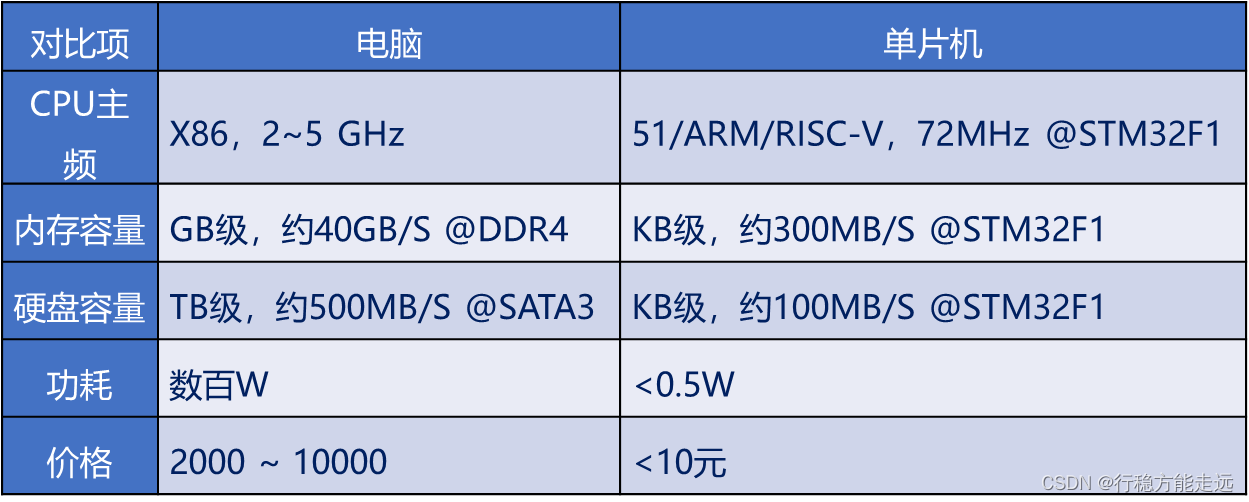
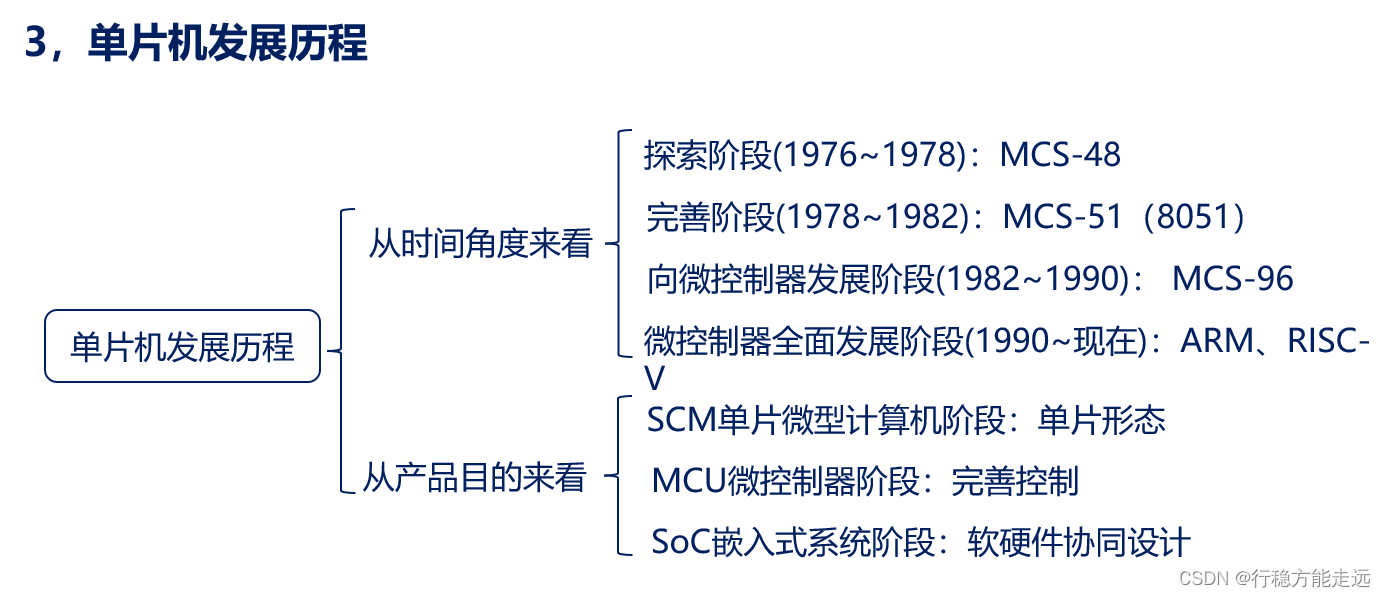
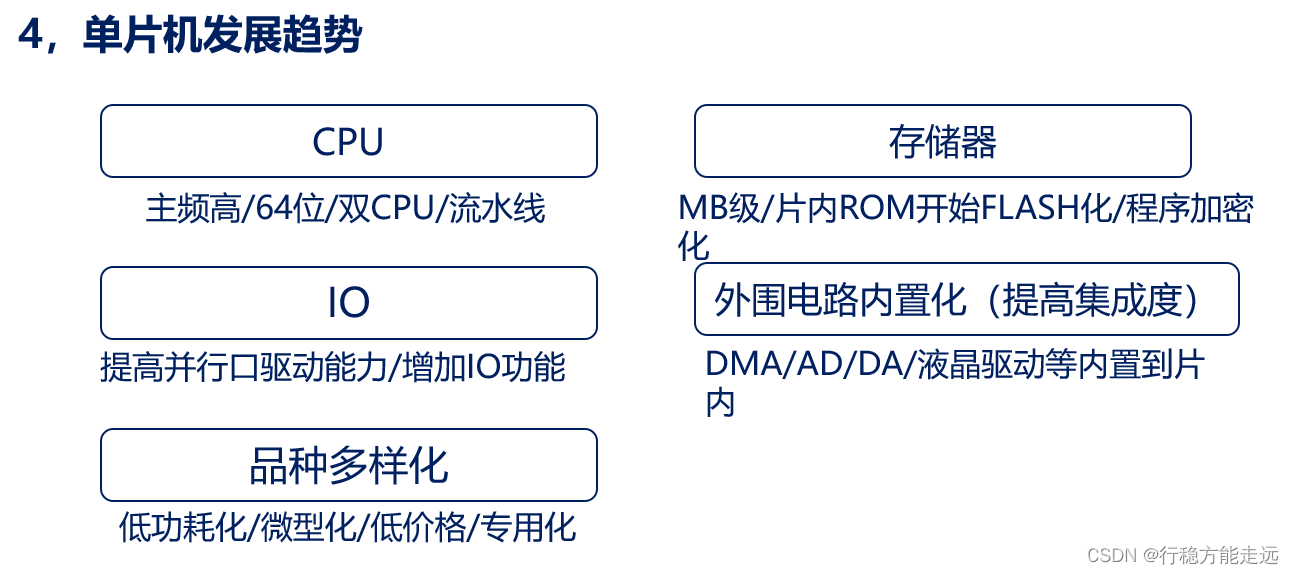
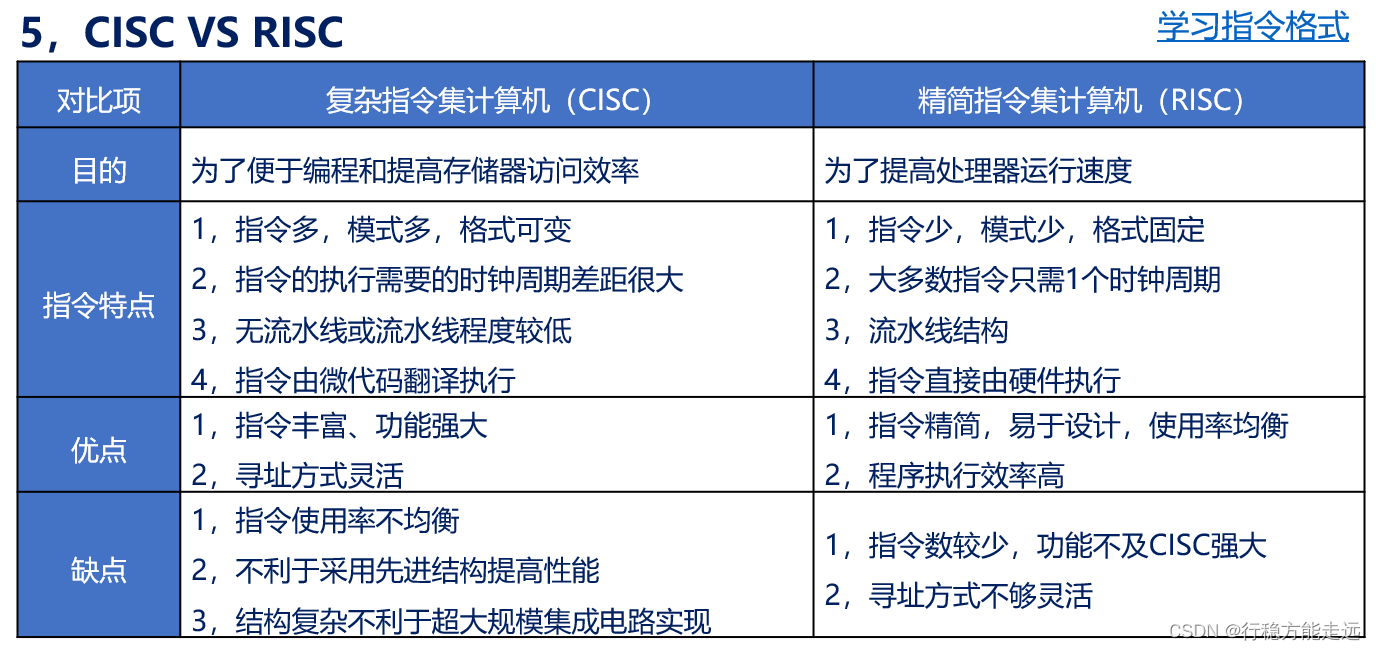
单片机简介

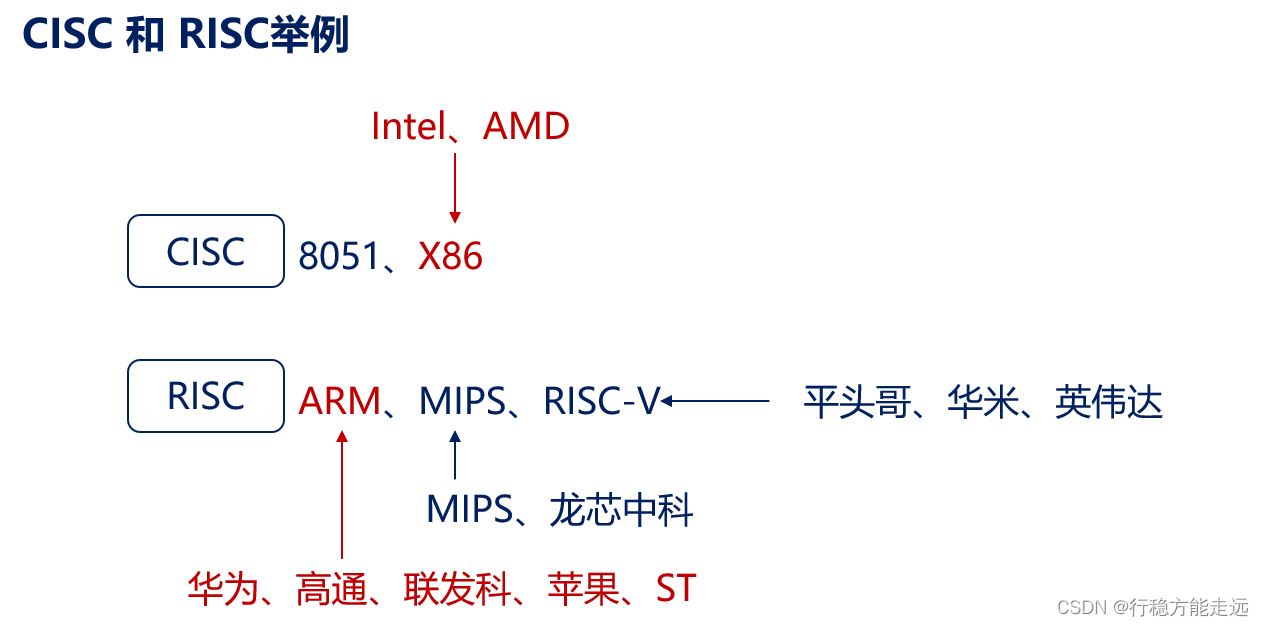
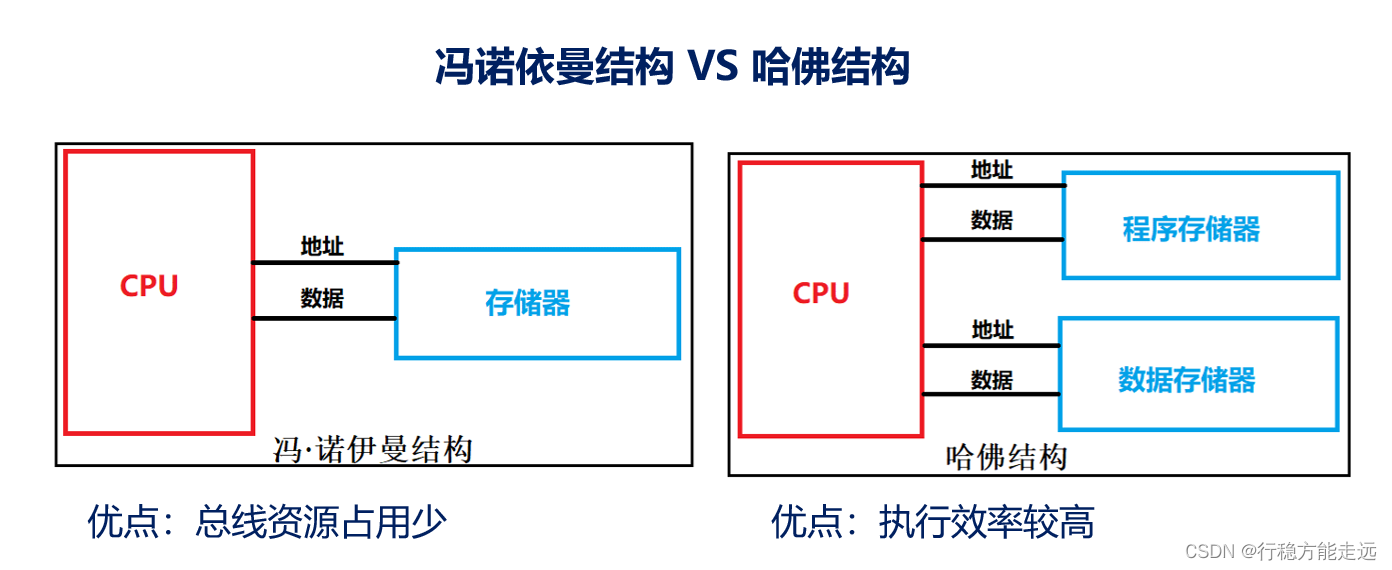

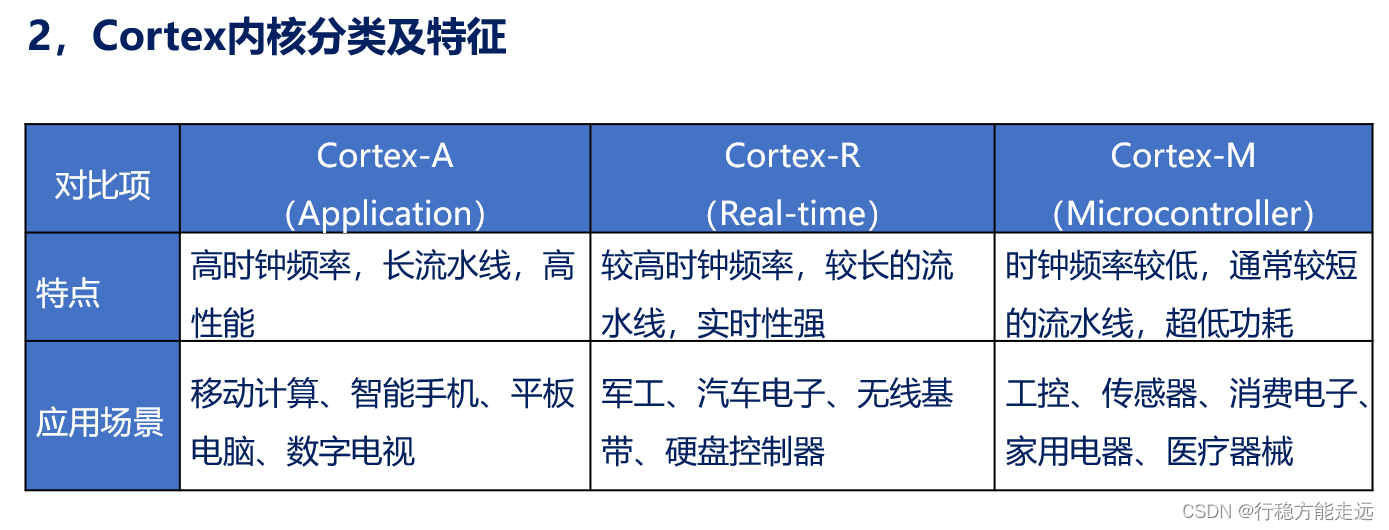
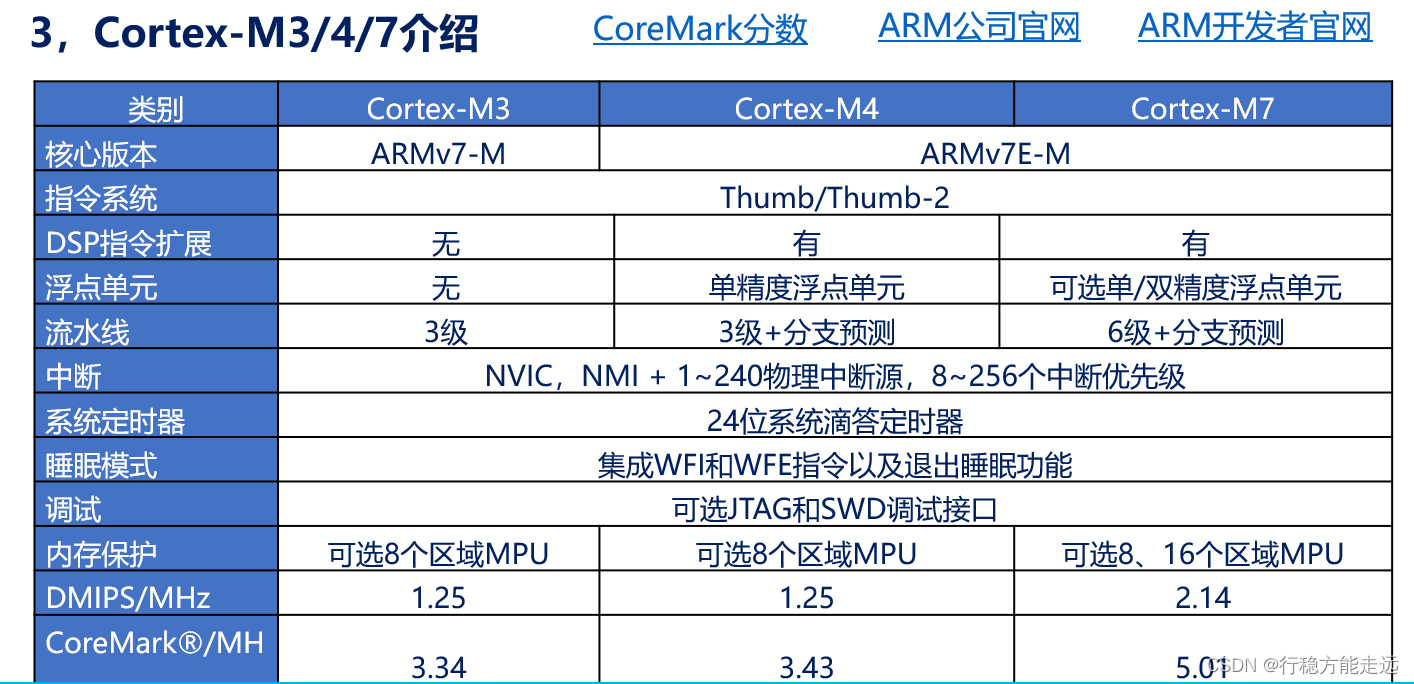
Cortex-M介绍


初识STM32

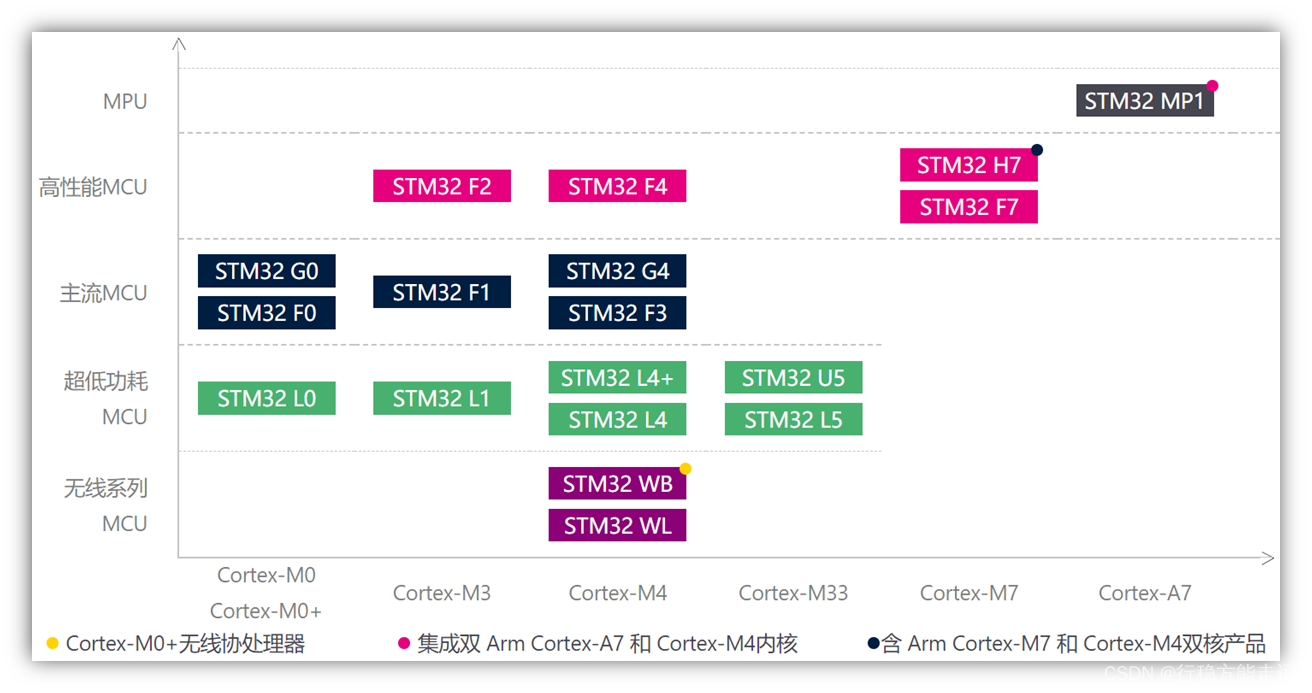
STM32芯片分类
ST中文社区网:https://www.stmcu.org.cn/
ST官网:https://www.st.com/content/st_com/en.html
STM32命名规则

STM32 选型
了解了STM32 的系列和命名以后,我们再进行STM32 选型就会比较容易了,这里我们只要遵循:由高到低,由大到小的原则,就可以很方便的完成设计选型了,具体如下:
由高到低原则:在不能评估项目所需性能的时候,可以考虑先选择高性能的STM32 型号进行开发,比如选择F4/F7/H7 等,在高性能STM32 上面完成关键性能(即最需要性能的代码)开发验证,如果满足使用要求,则可以降档,如从H7→F7→F4→F1,如不满足要求,则可以升档,如从F4→F7→H7,通过此方法找到最佳性价比的STM32 系列。
由大到小原则:在不能评估项目所需FLASH 大小、SRAM 大小、GPIO 数量、定时器等资源需求的时候,可以考虑先选择容量较大的型号进行开发,比如选择512K/甚至1M FLASH 的型号进行开发,等到开发完成大部分功能之后,就对项目所需资源有了定论,从而可以根据实际情况进行降档选择(当然极少数情况可能还需要升档),通过此方法,找到最合适的STM32
型号。
整个选型工作大家可以在正点原子开发板上进行验证,一般我们开发板都是选择容量比较大/资源比较多的型号进行设计的,这样可以免去大家自己设计焊接验证板的麻烦,加快项目开发进度。一些资深工程师,对项目要求认识比较深入的话,甚至都不需要验证了,直接就可以选出最合适的型号,这个效率更高。当然这个需要长期积累和多实践,相信只要大家多学习,多实践,总有一天也能达到这个级别。
STM32 设计
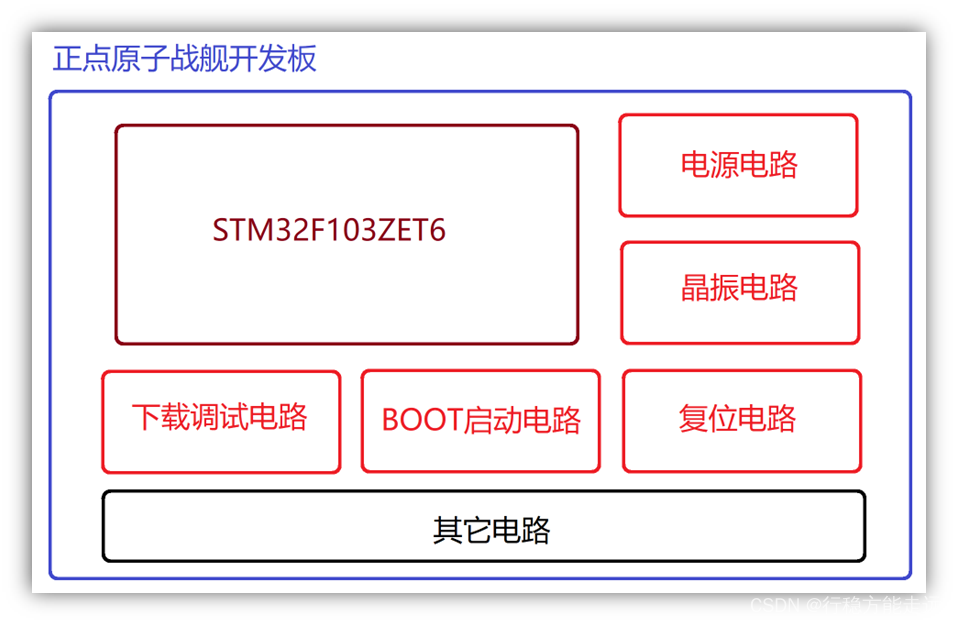
这里我们简单给大家介绍一下STM32 的原理图设计,上一节我们通过选型原则可以确定项目所需的STM32 具体型号,但是在选择型号以后,需要先设计原理图,然后再画PCB、打样、焊接、调试等步骤。这里我们重点介绍如何设计STM32F103 的原理图。
任何MCU 部分的原理图设计,其实都遵循:最小系统+ IO 分配的设计原则。在开始设计原理图之前,我们要通读一遍对STM32F103 原理图设计非常有用的手册:STM32F103 的数据手册,可以说不看这个数据手册,我们就无法设计STM32F103 原理图。
数据手册
在设计STM32F103 原理图的时候,我们需要用到一个非常重要的文档:STM32F103 数据
手册,里面对STM32F103 的IO 定义和说明有非常详细的描述,是我们设计原理图的基础。战舰开发板所使用的STM32F103ZET6 芯片数据手册,存放在:A 盘→ 7,硬件资料→2,芯片资料→ STM32F103ZET6.pdf / STM32F103ZET6(中文版).pdf,接下来我们简单介绍一下如何使用该文档。
STM32F103ZET6.pdf 是最新的英文版(V13)STM32 数据手册
STM32F103ZET6(中文版).pdf 是中文版(V5)STM32 数据手册
大家可以根据自己的喜欢来选择合适的版本进行阅读,内容上基本大同小异,从准确性全面性的角度来说,看V13 英文版是最好的,从简单,易懂来说,看V5 中文版也是可以的。
STM32F103ZET6.pdf 数据手册是针对大容量系列(FLASH 容量在256KB~512KB 之间),主要包括8 个章节,如表2.3.4.1 所示:
| 章节 | 概要说明 |
|---|---|
| 介绍 | 简单说明数据手册作用:介绍大容量增强型F103xC/D/E 产品的订购信息和机械特性 |
| 规格说明 | 简单介绍STM32F103 内部所有资源及外设特点 |
| 引脚定义 | 介绍不同封装的引脚分布、引脚定义等,含引脚特性、复用功能、脚位等 |
| 存储器映像 | 介绍STM32F103 整个4GB 存储空间和外设的地址映射关系 |
| 电气特性 | 介绍STM32F103 的详细电气特性,包括工作电压、电流(自己设计电路的时候超过额定值就要额外加电阻限流)、温度、各外设资源的电气性能等 |
| 封装特性 | 介绍了STM32F103 不同封装的封装机械数据(脚距、长短等)、热特性等 |
| 订货代码 | 和2.3.2 节内容类似,介绍STM32 具体型号所代表的意义,方便选型订货 |
| 版本历史 | 介绍数据手册不同版本之间的差异和修订内容 |
整个STM32F103 数据手册,对我们开发学习STM32 来说都比较重要,因此建议大家可以简单的通读一遍这个文档,以加深印象。对于原理图设计,最重要的莫过于引脚定义这一章节了,只有知道了STM32 的引脚定义,才能开始设计原理图。
STM32F103ZET6 引脚分布如图2.3.4.1 所示:

STM32F103ZET6 引脚定义如表2.3.4.2 所示:
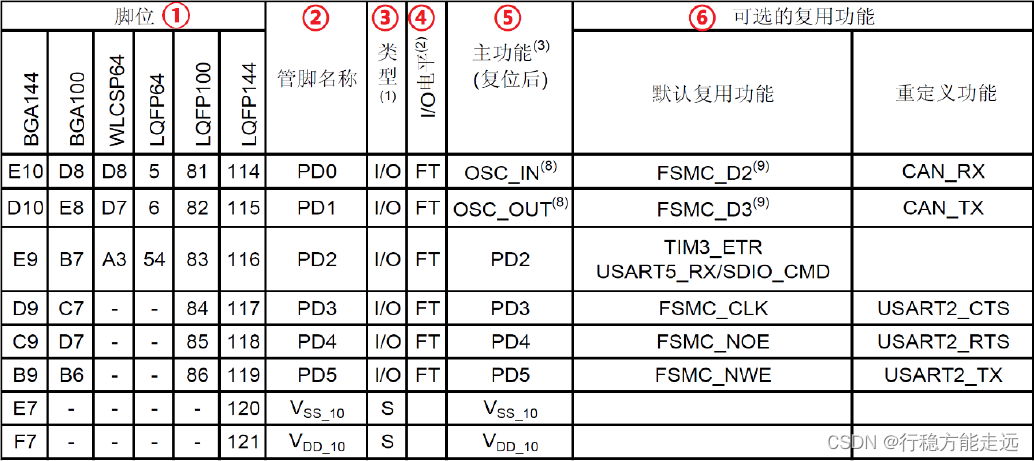
引脚定义表的具体说明如表2.3.4.3 所示:
| 序号 | 名称 | 说明 |
|---|---|---|
| ① | 脚位 | 对应芯片的引脚,LQFP封装使用纯数字表示,BGA 使用字母+数字表示 这里列出了6 种封装的脚位描述,根据实际型号选择合适的封装查阅 |
| ② | 管脚名称 | 即对应引脚的名字,PD0~5 表示GPIO 引脚,VSS_10/VDD_10 表示第10 组电源引脚,其他类似 |
| ③ | 类型 | I/O :表示输入/输出引脚 I :表示输入引脚 S :表示电源引脚 |
| ④ | IO 电平 | FT :表示5V 兼容的引脚(可以接5V/3.3V) 空:表示5V 不兼容引脚(仅可以接3.3V) |
| ⑤ | 主功能(复位后) | 复位后,该引脚的默认功能 |
| ⑥ | 可选的复用功能 | 默认复用功能:是指开启复用功能后,该引脚默认的复用功能;重定义功能:是指可以通过重映射的复用功能,需设置重映射寄存器 |
了解引脚分布和引脚定义以后,我们就可以开始设计STM32F103 的原理图了。
最小系统
最小系统就是保证MCU 正常运行的最低要求,一般是指MCU 的供电、复位、晶振、BOOT等部分。STM32F103 的最小系统需求如表2.3.4.4 所示:
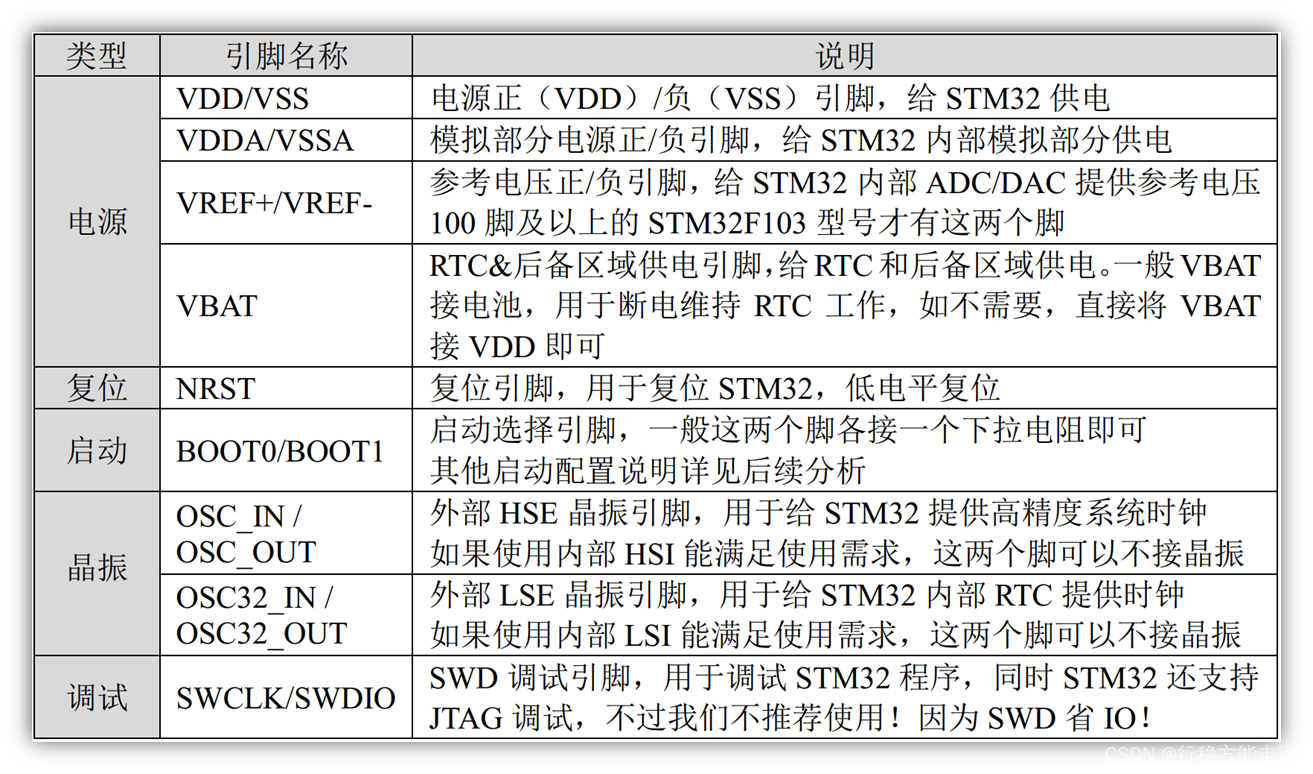
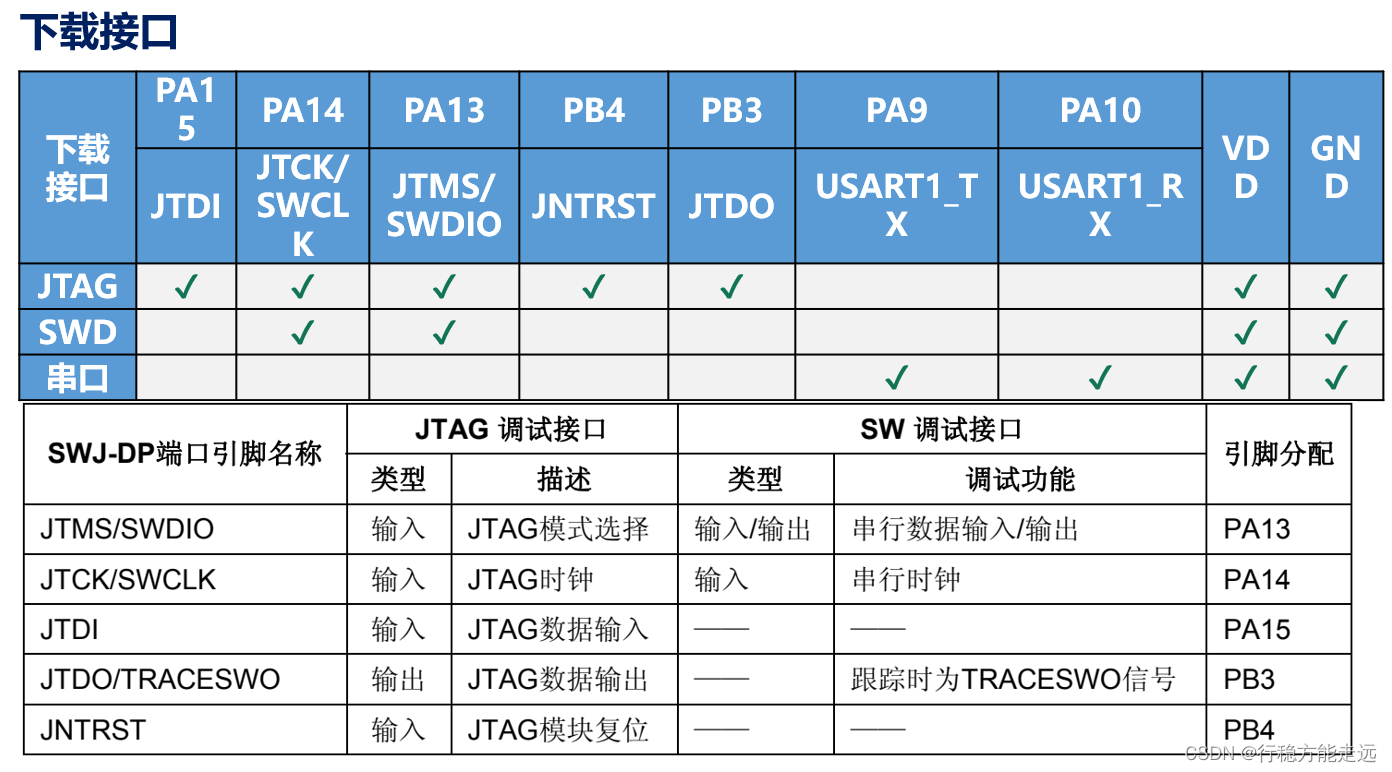
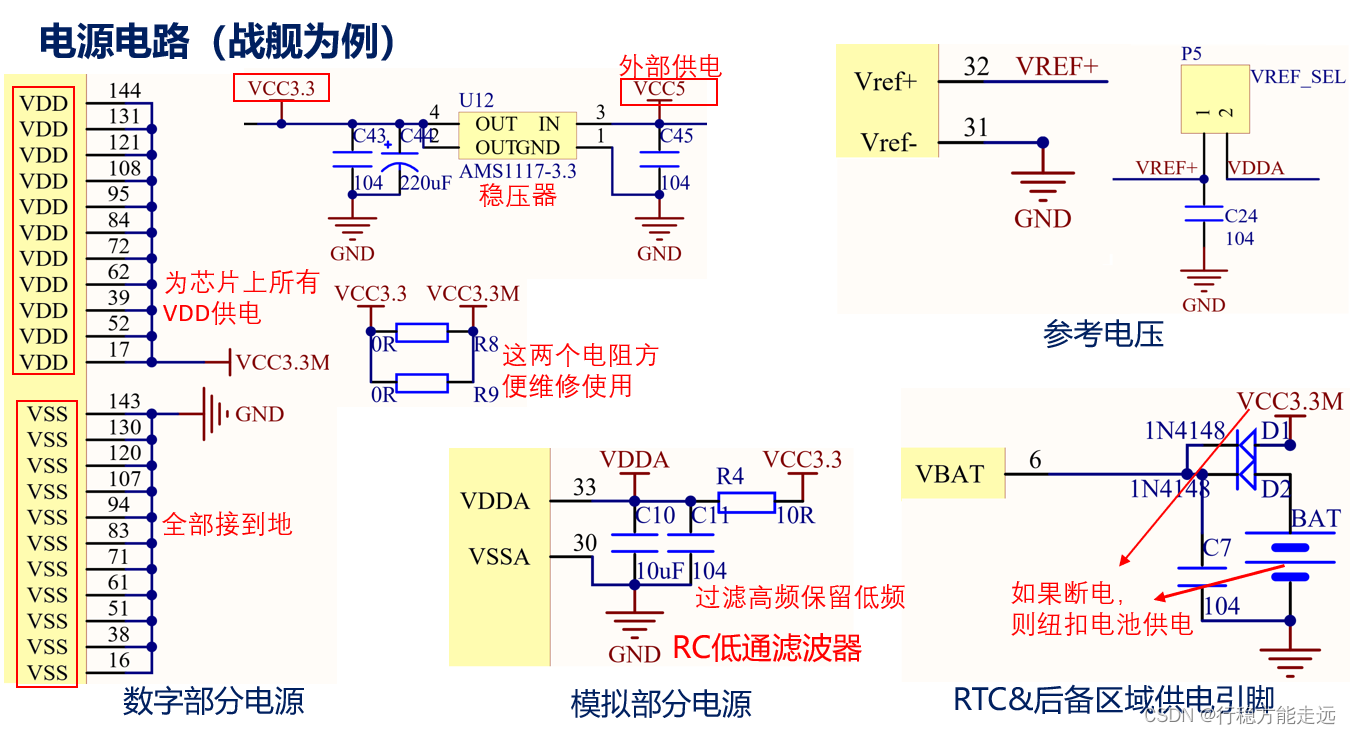

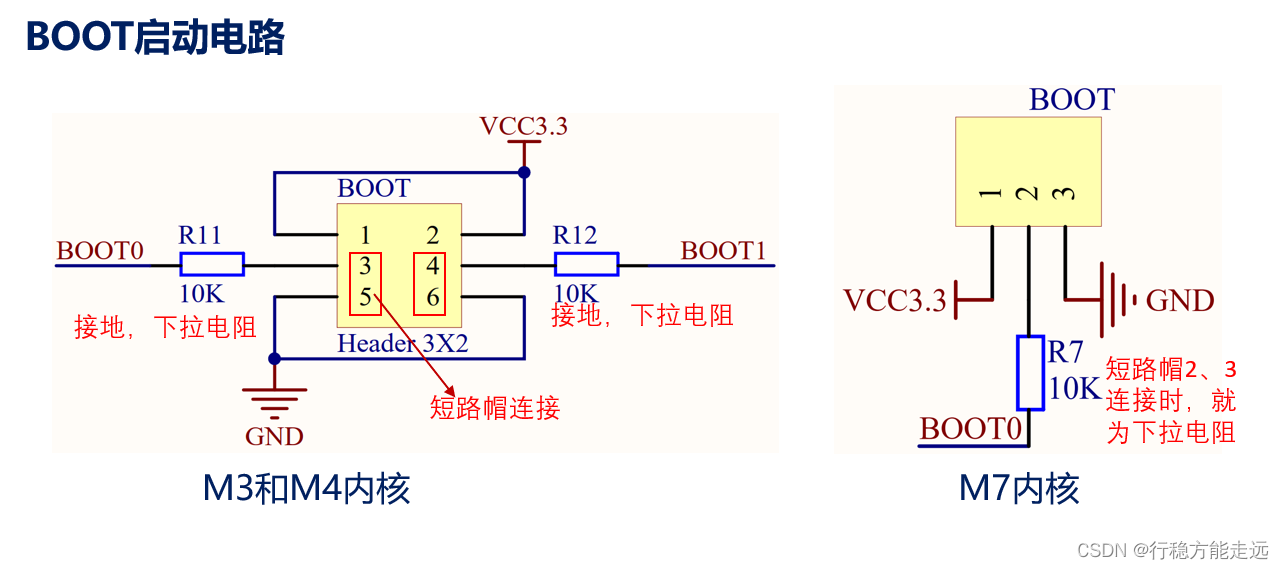
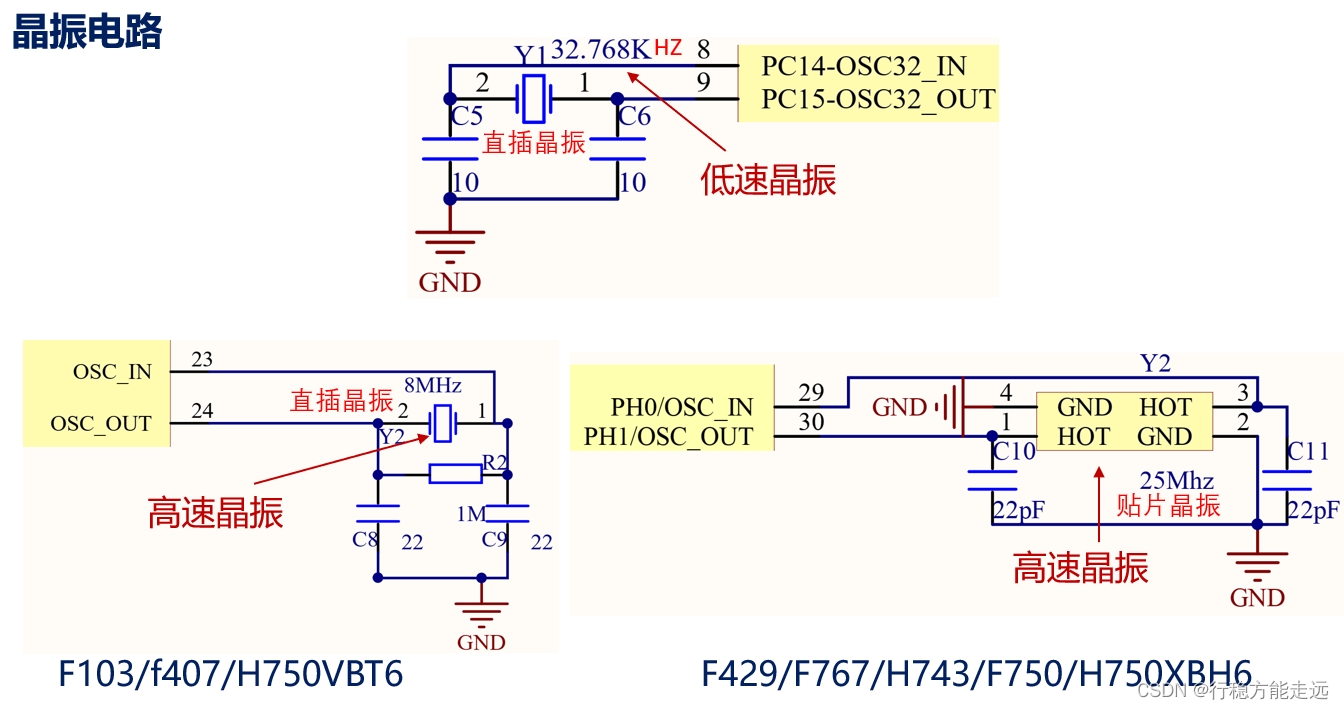
完成以上引脚的设计以后,STM32F103 的最小系统就完成了,关于这些引脚的实际原理图,大家可以参考我们战舰开发板的原理图。接下来就可以开始进行IO 分配了。
IO 分配
IO 分配就是在完成最小系统设计以后,根据项目需要对MCU 的IO 口进行分配,连接不同的器件,从而实现整体功能。比如:GPIO、IIC、SPI、SDIO、FSMC、USB、中断等。遵循:先分配特定外设IO,再分配通用IO,最后微调的原则,见表2.3.4.5 所示:
| 分配 | 外设 | 说明 |
|---|---|---|
| 特定外设 | IIC | IIC 一般用到2 根线:IIC_SCL 和IIC_SDA(ST 叫I2C)数据手册有I2C_SCL、I2C_SDA 复用功能的GPIO 都可选用 |
| 特定外设 | SPI | SPI 用到4 根线:SPI_CS/MOSI/MISO/SCK 一般SPI_CS 我们使用通用GPIO 即可,方便挂多个SPI 器件;数据手册有SPI_MOSI/MISO/SCK 复用功能的GPIO 都可选用 |
| 特定外设 | TIM | 根据需要可选:TIM_CH1/2/3/4/ETR/1N/2N/3N/BKIN 等;数据手册有TIM_CH1/2/3/4/ETR/1N/2N/3N/BKIN 复用功能的GPIO 都可选用 |
| 特定外设 | USART UART | USART 有USART_TX/RX/CTS/RTS/CK 信号 UART 仅有UART_TX/RX 两个信号 一般用到2 根线:U(S)ART_TX 和U(S)ART_RX ;数据手册有U(S)ART_TX/RX 复用功能的GPIO 都可选用 |
| 特定外设 | USB | USB 用到2 根线:USB_DP 和USB_DM;数据手册有USB_DP、USB_DM 复用功能的GPIO 都可选用 |
| 特定外设 | CAN | CAN 用到2 根线:CAN_RX 和CAN_TX;数据手册有USB_DP、USB_DM 复用功能的GPIO 都可选用 |
| 特定外设 | ADC | ADC 根据需要可选:ADC_IN0 ~ ADC_IN15;数据手册有ADC_IN0 ~ ADC_IN15 复用功能的GPIO 都可选用 |
| 特定外设 | DAC | DAC 根据需要可选:DAC_OUT1 / DAC_OUT2;DAC 固定为:DAC_OUT1 使用PA4、DAC_OUT2 使用PA5 |
| 特定外设 | SDIO | SDIO 一般用到6 根线:SDIO_D0/1/2/3/SCK/CMD;数据手册有SDIO_D0/1/2/3/SCK/CMD 复用功能的GPIO 都可选用 |
| 特定外设 | FSMC | 根据需要可选:FSMC_D0 ~ 15 /A0 ~ 25/ NBL0 ~ 1/NE1~ 4/NCE2~ 3/ NOE/NWE/NWAIT/CLK 等;数据手册有FSMC_D0~ 15/A0~ 25/ NBL0~ 1/NE1~ 4/NCE2~3/NOE/;NWE/NWAIT/CLK 复用功能的GPIO 都可选用 |
| 通用 | GPIO | 在完成特定外设的IO 分配以后,就可以进行GPIO 分配了比如将按键、LED、蜂鸣器等仅需要高低电平读取/输出的外设连接到空闲的普通GPIO 即可 |
| 微调 | IO | 微调主要包括两部分:1,当IO不够用的时候,通用GPIO 和特定外设可能要共用IO 口;2,为了方便布线,可能要调整某些IO 口的位置。这两点,根据实际情况进行调整设置,做到:尽可能多的可以同时使用所有功能,尽可能方便布线。 |
经过以上几个步骤,我们就可以完成STM32F103 的原理图设计了。
STM32启动过程分析
本章给大家分析STM32F1 的启动过程,这里的启动过程是指从STM32 芯片上电复位执行的第一条指令开始,到执行用户编写的main 函数这之间的过程。我们编写程序,基本都是用C 语言编写,并且以main 函数作为程序的入口。但是事实上,main 函数并非最先执行的,在此之前需要做一些准备工作,准备工作通过启动文件的程序来完成。理解STM32 启动过程,对今后的学习和分析STM32 程序有很大的帮助。
注意:学习本章内容之前,请大家最好先阅读由正点原子团队编写的《STM32 启动文件浅析》和《STM32 MAP 文件浅析》这两份文档(路径:A 盘→ 1,入门资料)。
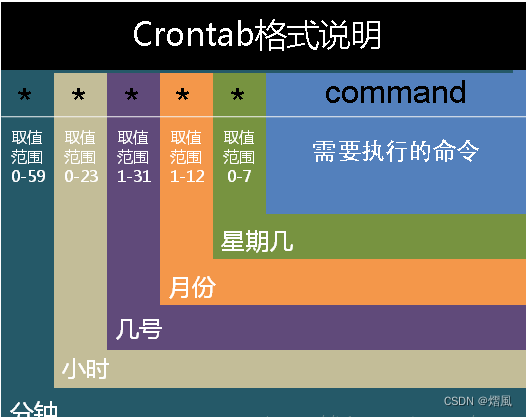
启动模式
我们知道的复位方式有三种:上电复位,硬件复位和软件复位。当产生复位,并且离开复
位状态后,CM3 内核做的第一件事就是读取下列两个32 位整数的值:
(1)从地址0x0000 0000 处取出堆栈指针MSP 的初始值,该值就是栈顶地址。
(2)从地址0x0000 0004 处取出程序计数器指针PC 的初始值,该值指向复位后执行的第
一条指令。下面用示意图表示,如图9.1.1 所示。

上述过程中,内核是从0x0000 0000 和0x0000 0004 两个的地址获取堆栈指针SP 和程序计
数器指针PC。事实上,0x0000 0000 和0x0000 0004 两个的地址可以被重映射到其他的地址空间。例如:我们将0x0800 0000 映射到0x0000 0000,即从内部FLASH 启动,那么内核会从地址0x0800 0000 处取出堆栈指针MSP 的初始值,从地址0x0800 0004 处取出程序计数器指针PC 的初始值。CPU 会从PC 寄存器指向的地址空间取出的第1 条指令开始执行程序,就是开始执行复位中断服务程序Reset_Handler。将0x0000 0000 和0x0000 0004 两个地址重映射到其他的地址空间,就是启动模式选择。
对于STM32F1 的启动模式(也称自举模式),我们看表9.1.1 进行分析。
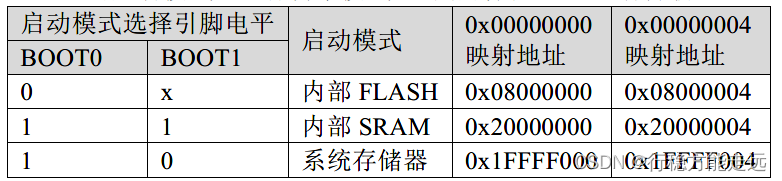
注:启动引脚的电平:0:低电平;1:高电平;x:任意电平,即高低电平均可
由表9.1.1 可以看到,STM32F1 根据BOOT 引脚的电平选择启动模式,这两个BOOT 引脚
根据外部施加的电平来决定芯片的启动地址。(0 和1 的准确电平范围可以查看F103 系列数据手册I/O 特性表,但我们最好是设置成Gnd 和VDD 的电平值)
(1)内部FLASH 启动方式
当芯片上电后采样到BOOT0 引脚为低电平时,0x00000000 和0x00000004 地址被映射到
内部FLASH 的首地址0x08000000 和0x08000004。因此,内核离开复位状态后,读取内部FLASH的0x08000000 地址空间存储的内容,赋值给栈指针MSP,作为栈顶地址,再读取内部FL ASH的0x08000004 地址空间存储的内容,赋值给程序指针PC,作为将要执行的第一条指令所在的地址。完成这两个操作后,内核就可以开始从PC 指向的地址中读取指令执行了。
(2)内部SRAM 启动方式
类似于内部Flash,当芯片上电后采样到BOOT0 和BOOT1 引脚均为高电平时,地址
0x00000000 和0x00000004 被映射到内部SRAM 的首地址0x20000000 和0x20000004,内核从SRAM 空间获取内容进行自举。在实际应用中,由启动文件starttup_stm32f103xe.s 决定了0x00000000 和0x00000004 地址存储什么内容,链接时,由分散加载文件(sct)决定这些内容的绝对地址,即分配到内部FLASH 还是内部SRAM。
(3)系统存储器启动方式
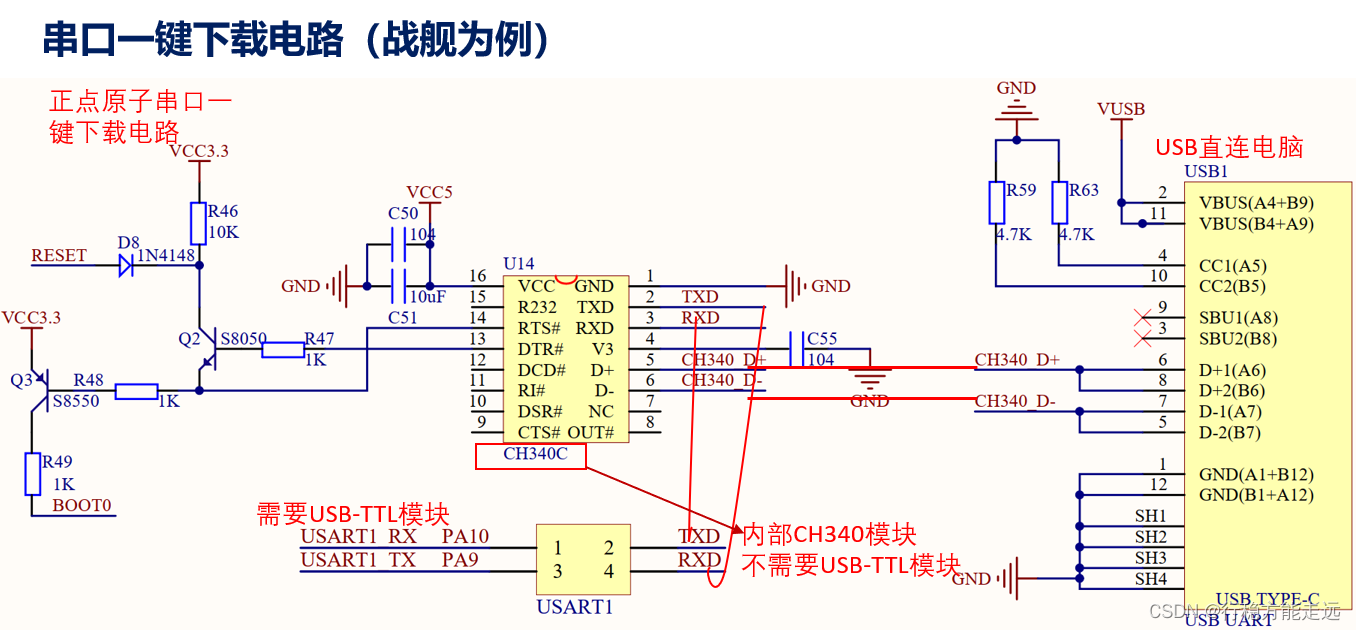
当芯片上电后采样到BOOT0 =1,BOOT1=0 的组合时,内核将从系统存储器的0x1FFFF000及0x1FFFF004 获取MSP 及PC 值进行自举。系统存储器是一段特殊的空间,用户不能访问,ST 公司在芯片出厂前就在系统存储器中固化了一段代码。因而使用系统存储器启动方式时,内核会执行该代码,该代码运行时,会为ISP(In System Program)提供支持,在STM32F1 上最常见的是检测USART1 传输过来的信息,并根据这些信息更新自己内部FLASH 的内容,达到升级产品应用程序的目的,因此这种启动方式也称为ISP 启动方式。
启动文件分析
STM32 启动文件由ST 官方提供,在官方的STM32Cube 固件包里,对于STM32F103 系
列芯片的启动文件,我们选用的是startup_STM32F103xe.s 这个文件。启动文件用汇编编写,是系统上电复位后第一个执行的程序。
启动文件主要做了以下工作:
1、初始化堆栈指针SP = _initial_sp
2、初始化程序计数器指针PC = Reset_Handler
3、设置堆和栈的大小
4、初始化中断向量表
5、配置外部SRAM 作为数据存储器(可选)
6、配置系统时钟,通过调用SystemInit 函数(可选)
7、调用C 库中的_main 函数初始化用户堆栈,最终调用main 函数
启动文件中的一些指令
| 指令名称 | 作用 |
|---|---|
| EQU | 给数字常量取一个符号名,相当于C 语言中的define |
| AREA | 汇编一个新的代码段或者数据段 |
| ALIGN | 编译器对指令或者数据的存放地址进行对齐,一般需要跟一个立即数,缺省表示4 字节对齐。要注意的是,这个不是ARM 的指令,是编译器的,这里放到一起为了方便。 |
| SPACE | 分配内存空间 |
| PRESERVE8 | 当前文件堆栈需要按照8 字节对齐 |
| THUMB | 表示后面指令兼容THUMB 指令。在ARM 以前的指令集中有16 位的THUMBM 指令,现在Cortex-M 系列使用的都是THUMB-2 指令集,THUMB-2 是32 位的,兼容16 位和32 位的指令,是THUMB 的超级版。 |
| EXPORT | 声明一个标号具有全局属性,可被外部的文件使用 |
| DCD | 以字节为单位分配内存,要求4 字节对齐,并要求初始化这些内存 |
| PROC | 定义子程序,与ENDP 成对使用,表示子程序结束 |
| WEAK | 弱定义,如果外部文件声明了一个标号,则优先使用外部文件定义的标号,如果外部文件没有定义也不会出错。要注意的是,这个不是ARM 的指令,是编译器的,这里放到一起为了方便。 |
| IMPORT | 声明标号来自外部文件,跟C 语言中的extern 关键字类似 |
| LDR | 从存储器中加载字到一个存储器中 |
| BLX | 跳转到由寄存器给出的地址,并根据寄存器的LSE 确定处理器的状态,还要把跳转前的下条指令地址保存到LR |
| BX | 跳转到由寄存器/标号给出的地址,不用返回 |
| B | 跳转到一个标号 |
| IF,ELSE,EN-DIF | 汇编条件分支语句,跟C 语言的类似 |
| END | 到达文件的末尾,文件结束 |
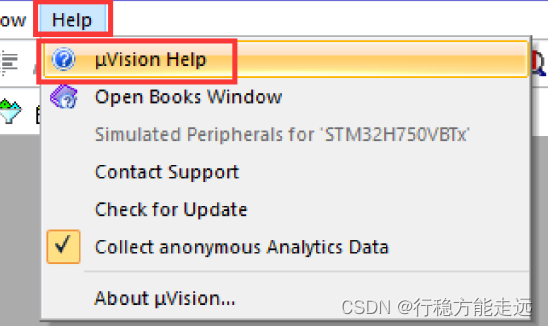
上表,列举了STM32 启动文件的一些汇编和编译器指令,关于其他更多的ARM 汇编指令,我们可以通过MDK 的索引搜索工具中搜索找到。打开索引搜索工具的方法:
MDK->Help->uVision Help,如图9.2.1.1 所示。
打开之后,我们以EQU 为例,演示一下怎么使用,如图9.2.1.2 所示。
图9.2.1.2 搜索EQU 汇编指令
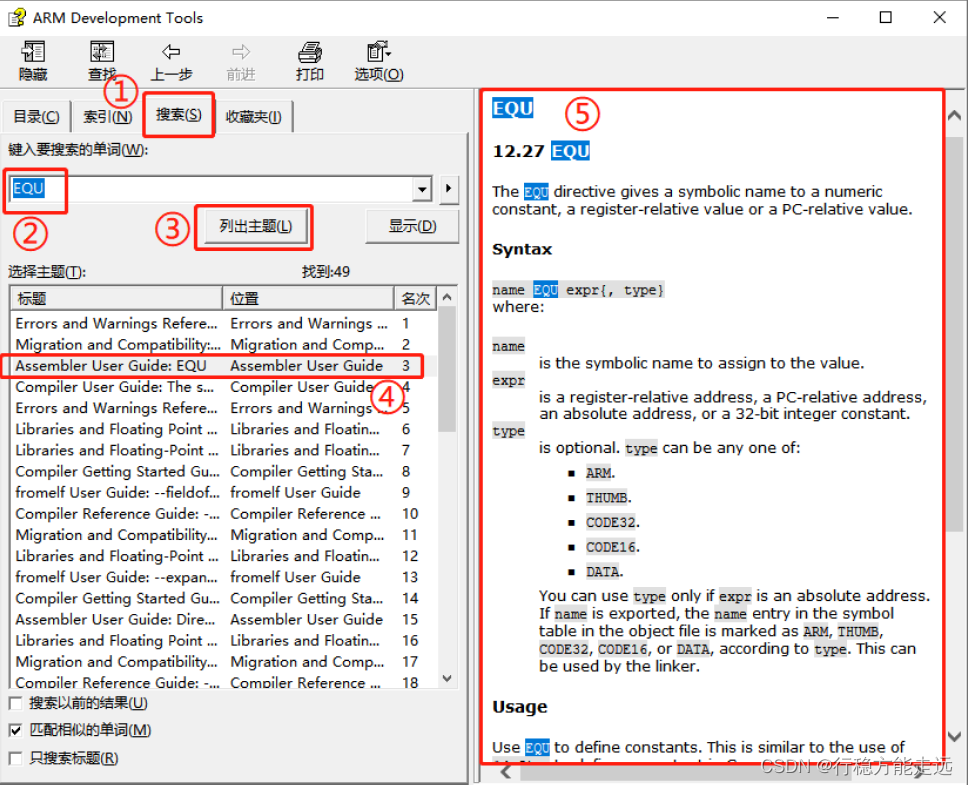
搜索到的结果有很多,我们只需要看位置为Assembler User Guide 这部分即可。
启动文件代码讲解
(1)栈空间的开辟
栈空间的开辟,源码如图9.2.2.1 所示:

源码含义:开辟一段大小为0x0000 0400(1KB)的栈空间,段名为STACK,NOINIT 表示不初始化;READWRITE 表示可读可写;ALIGN=3,表示按照2^3 对齐,即8 字节对齐。
AREA 汇编一个新的代码段或者数据段。
SPACE 分配内存指令,分配大小为Stack_Size 字节连续的存储单元给栈空间。
__initial_sp 紧挨着SPACE 放置,表示栈的结束地址,栈是从高往低生长,所以结束地址就是栈顶地址。
栈主要用于存放局部变量,函数形参等,属于编译器自动分配和释放的内存,栈的大小不能超过内部SRAM 的大小。如果工程的程序量比较大,定义的局部变量比较多,那么就需要在启动代码中修改栈的大小,即修改Stack_Size 的值。如果程序出现了莫名其妙的错误,并进入了HardFault 的时候,你就要考虑下是不是栈空间不够大,溢出了的问题。
(2)堆空间的开辟
堆空间的开辟,源码如图9.2.2.2 所示:

源码含义:开辟一段大小为0x0000 0200(512 字节)的堆空间,段名为HEAP,不初始化,可读可写,8 字节对齐。
__heap_base 表示堆的起始地址,__heap_limit 表示堆的结束地址。堆和栈的生长方向相反的,堆是由低向高生长,而栈是从高往低生长。
堆主要用于动态内存的分配,像malloc()、calloc()和realloc()等函数申请的内存就在堆上面。堆中的内存一般由程序员分配和释放,若程序员不释放,程序结束时可能由操作系统回收。
接下来是PRESERVE8 和THUMB 指令两行代码。如图9.2.2.3 所示。

PRESERVE8:指示编译器按照8 字节对齐。
THUMB:指示编译器之后的指令为THUMB 指令。
注意:由于正点原子提供了独立的内存管理实现方式(mymalloc,myfree 等),并不需要使用C库的malloc 和free 等函数,也就用不到堆空间,因此我们可以设置Heap_Size 的大小为0,以节省内存空间。
(3)中断向量表定义(简称:向量表)
为中断向量表定义一个数据段,如图9.2.2.4 所示

源码含义:定义一个数据段,名字为RESET, READONLY 表示只读。EXPORT 表示声明一
个标号具有全局属性,可被外部的文件使用。这里是声明了__Vectors、__Vectors_End 和__Vectors_Size 三个标号具有全局性,可被外部的文件使用。
STM32F103 的中断向量表定义代码,如图9.2.2.5 所示。
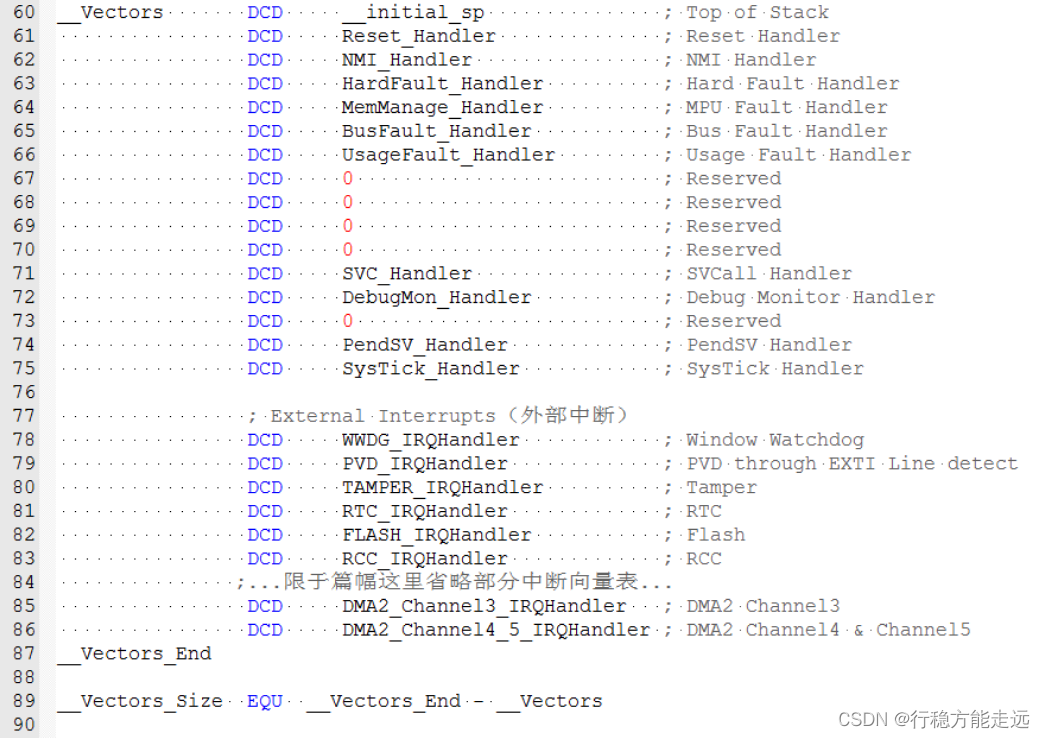
__Vectors 为向量表起始地址,__Vectors_End 为向量表结束地址,__Vectors_Size 为向量表大小,__Vectors_Size = __Vectors_End - __Vectors。
DCD:分配一个或者多个以字为单位的内存,以四字节对齐,并要求初始化这些内存。
中断向量表被放置在代码段的最前面。例如:当我们的程序在FLASH 运行时,那么向量表的起始地址是:0x0800 0000。结合图9.2.2.5 可以知道,地址0x0800 0000 存放的是栈顶地址。
DCD 以四字节对齐分配内存,也就是下个地址是0x0800 0004,存放的是Reset_Handler 中断函数入口地址。
从代码上看,向量表中存放的都是中断服务函数的函数名,所以C 语言中的函数名对芯片来说实际上就是一个地址。
STM32F103 的中断向量表可以在《STM32F10xxx 参考手册_V10(中文版).pdf》的第9 章
的9.1.2 小节找到,与中断向量表定义代码是对应的。
(4)复位程序
接下来是定义只读代码段,如图9.2.2.6 所示:

定义一个段命为.text,只读的代码段,在CODE 区。
复位子程序代码,如图9.2.2.7 所示:
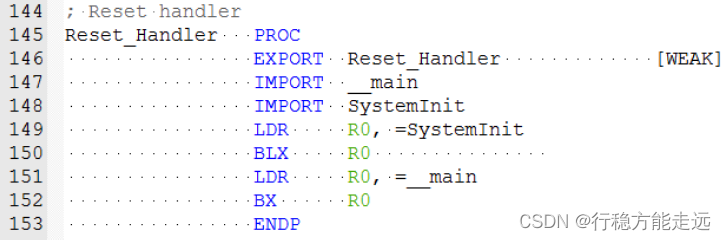
利用PROC、ENDP 这一对伪指令把程序段分为若干个过程,使程序的结构加清晰。
复位子程序是复位后第一个被执行的程序,主要是调用SystemInit 函数配置系统时钟、还有就是初始化FSMC 总线上外挂的SRAM(可选)。然后在调用C 库函数__main,最终调用main 函数去到C 的世界。
EXPORT 声明复位中断向量Reset_Handler 为全局属性,这样外部文件就可以调用此复位中断服务。
WEAK:表示弱定义,如果外部文件优先定义了该标号则首先引用外部定义的标号,如果外部文件没有声明也不会出错。这里表示复位子程序可以由用户在其他文件重新实现,这里并不是唯一的。
IMPORT 表示该标号来自外部文件。这里表示SystemInit 和__main 这两个函数均来自外
部的文件。
LDR、BLX、BX 是内核指令,可在《Cortex-M3 权威指南》第四章-指令集里面查询到。
LDR 表示从存储器中加载字到一个存储器中。
BLX 表示跳转到由寄存器给出的地址,并根据寄存器的LSE 确定处理器的状态,还要把跳转前的下条指令地址保存到LR。
BX 表示跳转到由寄存器/标号给出的地址,不用返回。这里表示切换到__main 地址,最终调用main 函数,不返回,进入C 的世界。
(5)中断服务程序
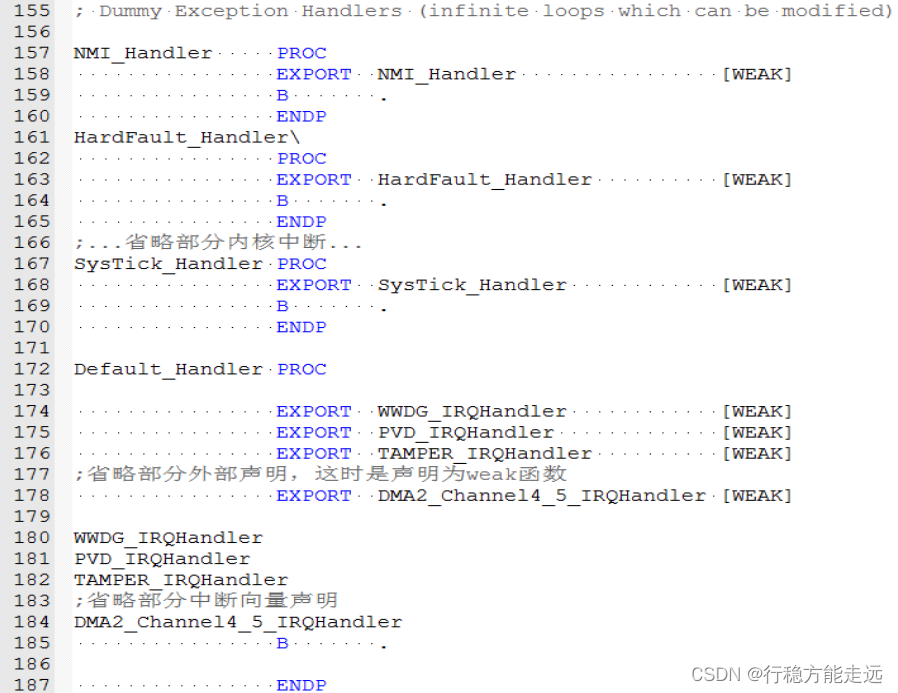
接下来就是中断服务程序了,如图9.2.2.8 所示。
可以看到这些中断服务函数都被[WEAK]声明为弱定义函数,如果外部文件声明了一个标号,则优先使用外部文件定义的标号,如果外部文件没有定义也不会出错。
这些中断函数分为系统异常中断和外部中断,外部中断根据不同芯片有所变化。B 指令是跳转到一个标号,这里跳转到一个‘.’,表示无限循环。
在启动文件代码中,已经把我们所有中断的中断服务函数写好了,但都是声明为弱定义,所以真正的中断服务函数需要我们在外部实现。
如果我们开启了某个中断,但是忘记写对应的中断服务程序函数又或者把中断服务函数名写错,那么中断发生时,程序就会跳转到启动文件预先写好的弱定义的中断服务程序中,并且在B 指令作用下跳转到一个‘.’中,无限循环。
这里的系统异常中断部分是内核的,外部中断部分是外设的。
(6)用户堆栈初始化
ALIGN 指令,如图9.2.2.9 所示:

ALIGN 表示对指令或者数据的存放地址进行对齐,一般需要跟一个立即数,缺省表示4 字节对齐。要注意的是,这个不是ARM 的指令,是编译器的。
接下就是启动文件最后一部分代码,用户堆栈初始化代码,如图9.2.2.10 所示:
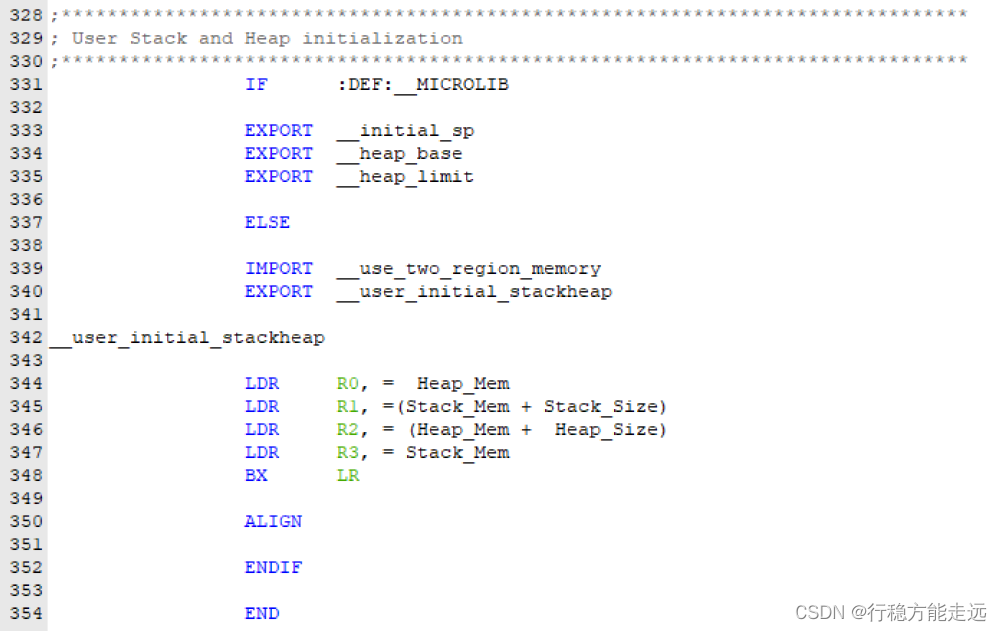
IF, ELSE, ENDIF 是汇编的条件分支语句。
588 行判断是否定义了__MICROLIB。关于__MICROLIB 这个宏定义,我们是在KEIL 里面配置,具体方法如图9.2.2.11 所示。
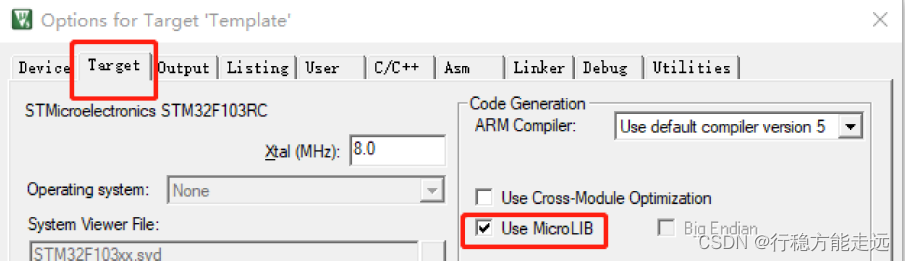
勾选了Use MicroLIB 就代表定义了__MICROLIB 这个宏。
如果定义__MICROLIB,声明__initial_sp、__heap_base 和__heap_limit 这三个标号具有全局属性,可被外部的文件使用。__initial_sp 表示栈顶地址,__heap_base 表示堆起始地址,
__heap_limit 表示堆结束地址。
如果没有定义__MICROLIB,实际的情况就是我们没有定义__MICROLIB,所以使用默认的C 库运行。那么堆栈的初始化由C 库函数__main 来完成。
IMPORT 声明__use_two_region_memory 标号来自外部文件。
EXPORT 声明__user_initial_stackheap 具有全局属性,可被外部的文件使用。
340 行标号__user_initial_stackheap,表示用户堆栈初始化程序入口。
接下来进行堆栈空间初始化,堆是从低到高生长,栈是从高到低生长,是两个互相独立的数据段,并且不能交叉使用。
344 行保存堆起始地址。345 行保存栈大小。346 行保存堆大小。347 行保存栈顶指针。348行跳转到LR 标号给出的地址,不用返回。354 行END 表示到达文件的末尾,文件结束。
Use MicroLIB
MicroLIB 是MDK 自带的微库,是缺省C 库的备选库,MicroLIB 进行了高度优化使得其代码变得很小,功能比缺省C 库少。MicroLIB 是没有源码的,只有库。
关于MicroLIB 更多知识可以看官方介绍http://www.keil.com/arm/microlib.asp 。
系统启动流程
我们知道启动模式不同,启动的起始地址是不一样的,下面我们以代码下载到内部FLASH的情况举例,即代码从地址0x0800 0000 开始被执行。
当产生复位,并且离开复位状态后,CM3 内核做的第一件事就是读取下列两个32 位整数
的值:
(1)从地址0x0800 0000 处取出堆栈指针MSP 的初始值,该值就是栈顶地址。
(2)从地址0x0800 0004 处取出程序计数器指针PC 的初始值,该值指向中断服务程序Reset_Handler。下面用示意图表示,如图9.2.3.1 所示。

我们看看STM32F103 开发板HAL 库例程的实验1 跑马灯实验中,取出的MSP 和PC 的值是多少,方法如图9.2.3.2 所示。
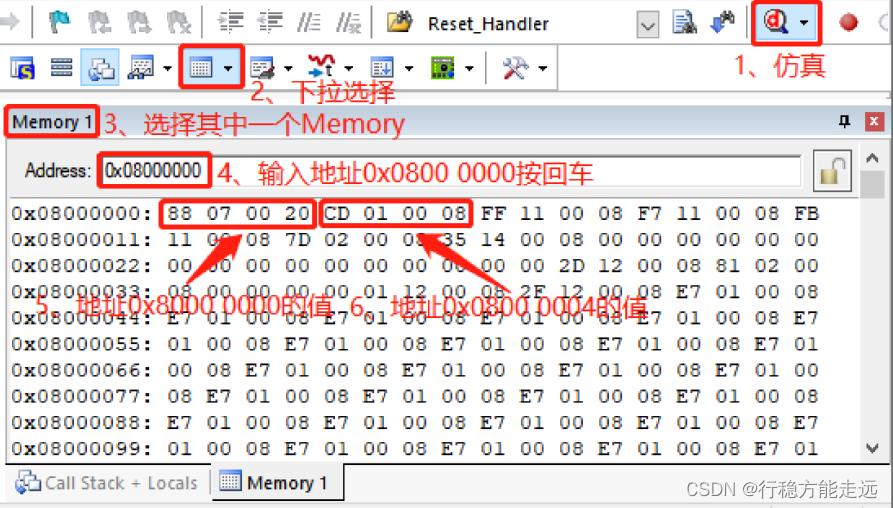
由图9.2.3.2 可以知道地址0x0800 0000 的值是0x2000 0788,地址0x0800 0004 的值是0x0800 01CD,即堆栈指针SP =0x2000 0788,程序计数器指针PC = 0x0800 01CD(即复位中断服务程序Reset_Handler 的入口地址)。因为CM3 内核是小端模式,所以倒着读。
请注意,这与传统的ARM 架构不同——其实也和绝大多数的其它单片机不同。传统的ARM架构总是从0 地址开始执行第一条指令。它们的0 地址处总是一条跳转指令。而在CM3 内核中,0 地址处提供MSP 的初始值,然后就是向量表(向量表在以后还可以被移至其它位置)。
向量表中的数值是32 位的地址,而不是跳转指令。向量表的第一个条目指向复位后应执行的第一条指令,就是Reset_Handler 这个函数。下面继续以MINI 开发板HAL 库例程实验1 跑马灯实验为例,代码从地址0x0800 0000 开始被执行,讲解一下系统启动,初始化堆栈、MSP 和PC后的内存情况。
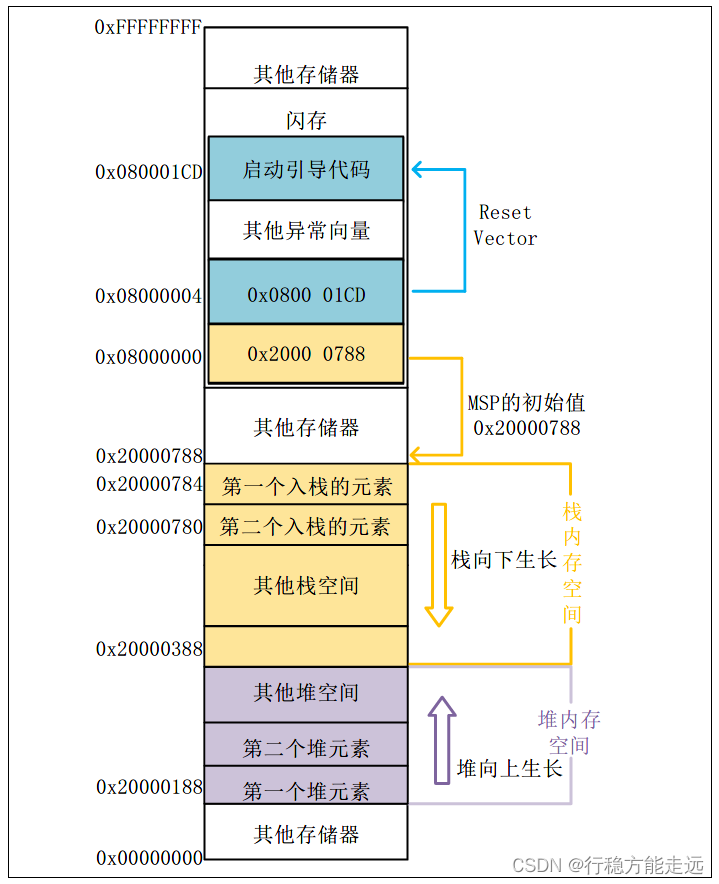
因为CM3 使用的是向下生长的满栈,所以MSP 的初始值必须是堆栈内存的末地址加1。
举例来说,如果你的栈区域在0x2000 0388‐0x2000 0787(1KB 大小)之间,那么MSP 的
初始值就必须是0x2000 0788。
向量表跟随在MSP 的初始值之后——也就是第2 个表目。
R15 是程序计数器,在汇编代码中,可以使用名字“PC”来访问它。ARM 规定:PC 最低两位并不表示真实地址,最低位LSB 用于表示是ARM 指令(0)还是Thumb 指令(1),因为CM3 主要执行Thumb 指令,所以这些指令的最低位都是1(都是奇数)。因为CM3 内部使用了指令流水线,读PC 时返回的值是当前指令的地址+4。比如说:
0x1000: MOV R0, PC ; R0 = 0x1004
如果向PC 写数据,就会引起一次程序的分支(但是不更新LR 寄存器)。CM3 中的指令至少是半字对齐的,所以PC 的LSB 总是读回0。然而,在分支时,无论是直接写PC 的值还是使用分支指令,都必须保证加载到PC 的数值是奇数(即LSB=1),表明是在Thumb 状态下执行。倘若写了0,则视为转入ARM 模式,CM3 将产生一个fault 异常。
正因为上述原因,图9.2.3.3 中使用0x0800 01CD 来表达地址0x0800 01CC。当0x0800 01CD处的指令得到执行后,就正式开始了程序的执行(即去到C 的世界)。所以在此之前初始化MSP是必需的,因为可能第1 条指令还没执行就会被NMI 或是其它fault 打断。MSP 初始化好后
就已经为它们的服务例程准备好了堆栈。
STM32 启动文件分析就给大家介绍到这里,更多内容请看《STM32 启动文件浅析》。
map 文件分析
MDK 编译生成文件简介
MDK 编译工程,会生成一些中间文件(如.o、.axf、.map 等),最终生成hex 文件,以便下载到MCU 上面执行,以STM32F103 开发板HAL 库例程的实验1 跑马灯实验为例(其他开发板类似),编译过程产生的所有文件,都存放在Output 文件夹下,如图9.3.1.1 所示:
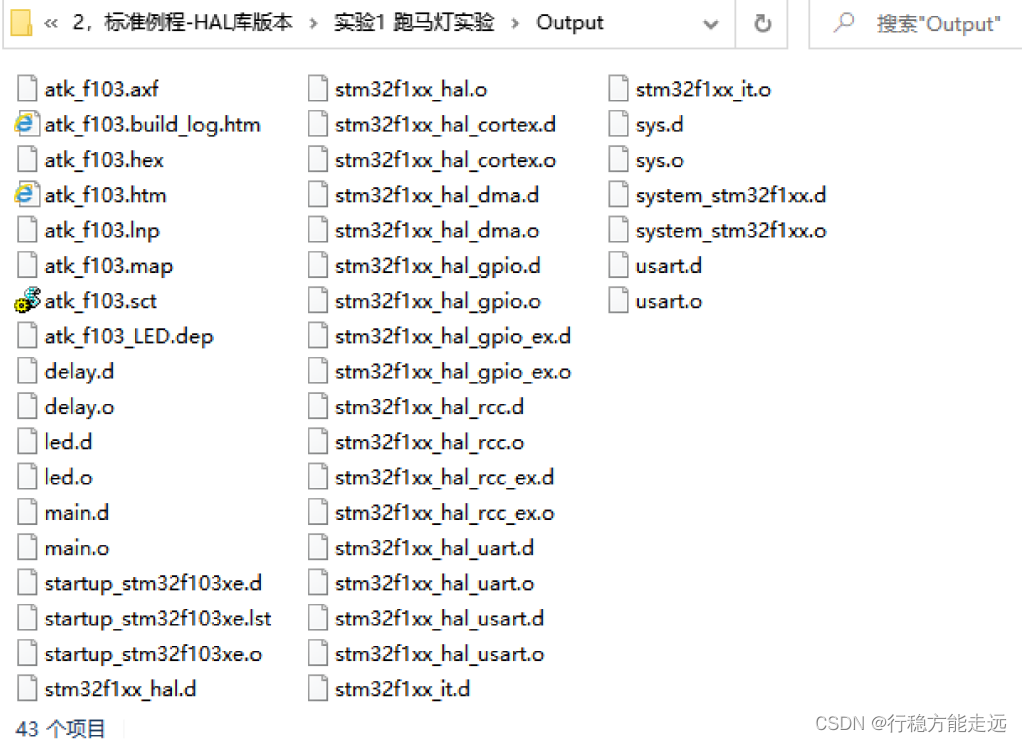
这里总共生成了43 个文件,共11 个类型,分别是:.axf、.crf、.d、.dep、.hex、.lnp、.lst、.o、.htm、
bulild_log.htm 和.map。43 个文件(勾选Browse informatio-n 时为59 个)看着不是很多,但是随着工程的增大,这些文件也会越来越多,大项目编译一次,可以生成几百甚至上千个这种文件,不过文件类型基本就是上面这些。
对于MDK 工程来说,基本上任何工程在编译过程中都会有这11 类文件,常见的MDK编译过程生产文件类型如表9.3.1.1 所示:
| 文件类型 | 说明 |
|---|---|
| .o | 可重定向1 对象文件,每个源文件(.c/.s 等)编译都会生成一个.o 文件 |
| .axf | 由ARMCC 编译生产的可执行对象文件,不可重定向2 (绝对地址);多个.o 文件链接生成.axf 文件,我们在仿真的时候,需要用到该文件 |
| .hex | Intel Hex 格式文件,可用于下载到MCU,.hex 文件由.axf 文件转换而来 |
| .crf | 交叉引用文件,包含浏览信息(定义、标识符、引用) |
| .d | 由ARMCC/GCC 编译生产的依赖文件(.o 文件所对应的依赖文件)每个.o 文件,都有一个对应的.d 文件 |
| .dep | 整个工程的依赖文件 |
| .lnp | MDK 生成的链接输入文件,用于命令输入 |
| .lst | C 语言或汇编编译器生成的列表文件 |
| .htm | 链接生成的列表文件 |
| .build_log.htm | 最近一次编译工程时的日志记录文件 |
| .map | 连接器生成的列表文件/MAP 文件,该文件对我们非常有用 |
注1,可重定向是指该文件包含数据/代码,但是并没有指定地址,它的地址可由后续链接的时候进行指定。
注2,不可重定向是指该文件所包含的数据/代码都已经指定地址了,不能再改变。
map 文件分析
.map 文件是编译器链接时生成的一个文件,它主要包含了交叉链接信息。通过.map 文件,我们可以知道整个工程的函数调用关系、FLASH 和RAM 占用情况及其详细汇总信息,能具体到单个源文件(.c/.s)的占用情况,根据这些信息,我们可以对代码进行优化。.map文件可以分为以下5 个组成部分:
1,程序段交叉引用关系(Section Cross References)
2,删除映像未使用的程序段(Removing Unused input sections from the image)
3,映像符号表(Image Symbol Table)
4,映像内存分布图(Memory Map of the image)
5,映像组件大小(Image component sizes)
map 文件的MDK 设置
要生成map 文件,我们需要在MDK 的魔术棒→Listing 选项卡里面,进行相关设置,如图9.3.2.1.1 所示:
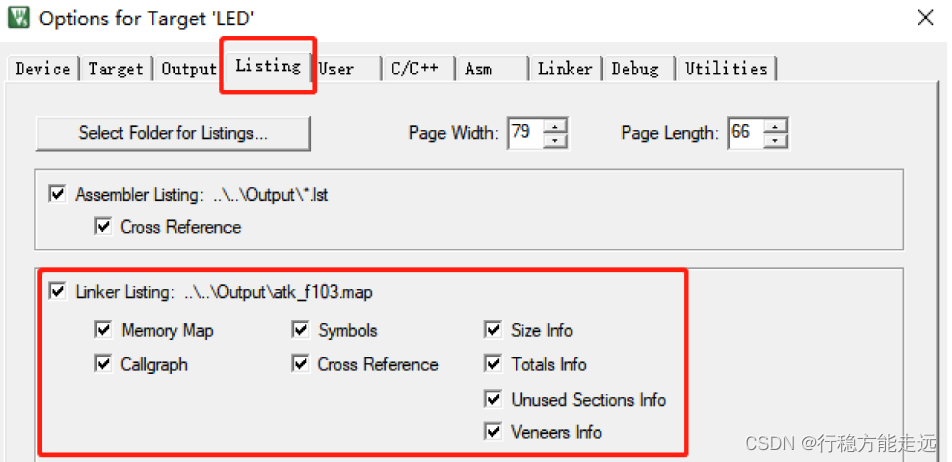
图9.3.2.1.1 中红框框出的部分就是我们需要设置的,默认情况下,MDK 这部分设置就是全勾选的,如果我们想取消掉一些信息的输出,则取消相关勾选即可(一般不建议)。
如图9.3.2.1.1 设置好MDK 以后,我全编译当前工程,当编译完成后(无错误),就会生成.map 文件。在MDK 里面打开.map 文件的方法如图9.3.2.1.2 所示:

1,先确保工程编译成功(无错误)。
2,双击LED,打开.map 文件。
3,map 文件打开成功。
map 文件的基础概念
为了更好的分析map 文件,我们先对需要用到的一些基础概念进行一个简单介绍,相关概念如下:
⚫ Section:描述映像文件的代码或数据块,我们简称程序段
⚫ RO:Read Only 的缩写,包括只读数据(RO data)和代码(RO code)两部分内容,占用FLASH 空间
⚫ RW:Read Write 的缩写,包含可读写数据(RW data,有初值,且不为0),占用FLASH(存储初值)和RAM(读写操作)
⚫ ZI:Zero initialized 的缩写,包含初始化为0 的数据(ZI data),占用RAM 空间。
⚫ .text:相当于RO code
⚫ .constdata:相当于RO data
⚫ .bss:相当于ZI data
⚫ .data:相当于RW data
map 文件的组成部分说明
我们前面说map 文件分为5 个部分组成,下面以STM32F103 开发板HAL 库例程的实验1 跑马灯实验为例,简要讲解一下。
1.程序段交叉引用关系(S S ection Cross References s )
这部分内容描述了各个文件(.c/.s 等)之间函数(程序段)的调用关系,举个例子如图9.3.2.3.1 所示:

上图中,框出部分:main.o(i.main) refers to sys.o(i.sys_stm32_clock_init) for sys_stm32_
clock_init 表示:main.c 文件中的main 函数,调用了sys.c 中的sys_stm32_clock_init 函数。其中:i.main 表示main 函数的入口地址,同理i.sys_stm32_clock_init 表示sys_stm32_clock_init 函数的入口地址。
- 删除映像未使用的程序段(Removing Unused input sections from the image)
这部分内容描述了工程中由于未被调用而被删除的冗余程序段(函数/数据),如图9.3.2.3.2 所示:
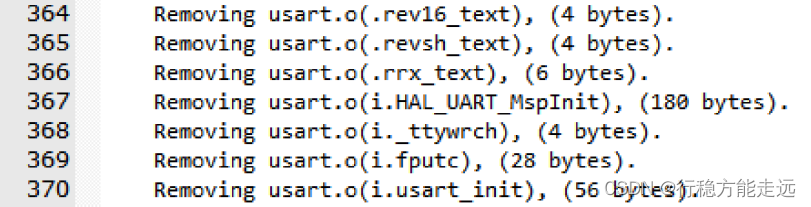

上图中,列出了所有被移除的程序段,比如usart.c 里面的usart_init 函数就被移除了,因为该例程没用到usart_init 函数。
另外,在最后还有一个统计信息:216 unused section(s) (total 15556bytes) removed from the image. 表示总共移除了216 个程序段(函数/数据),大小为15556 字节。即给我们的MCU 节
省了15556 字节的程序空间。
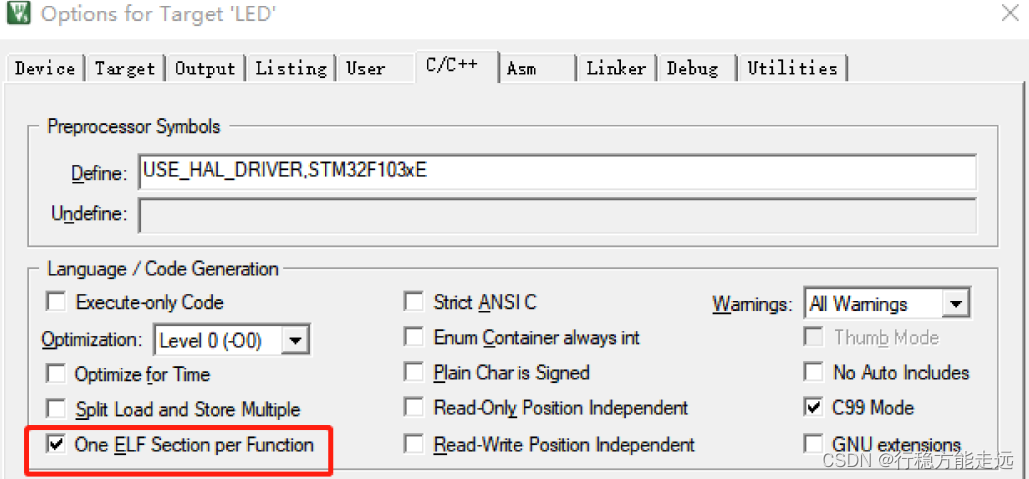
为了更好的节省空间,我们一般在MDK→魔术棒→C/C++选项卡里面勾选:One ELFSection per Function,如图9.3.2.3.3 所示:
3. 映像符号表(Image Symbol Table)
映像符号表(Image Symbol Table)描述了被引用的各个符号(程序段/数据)在存储器中的存储地址、类型、大小等信息。映像符号表分为两类:本地符号(Local Symbols)和全局符号(Global Symbols)。
本地符号(Local Symbols)记录了用static 声明的全局变量地址和大小,c 文件中函数的地址和用static 声明的函数代码大小,汇编文件中的标号地址(作用域:限本文件)。
全局符号(Global Symbols)记录了全局变量的地址和大小,C 文件中函数的地址及其代码大小,汇编文件中的标号地址(作用域:全工程)。
- 映像内存分布图(Memory Map of the image)
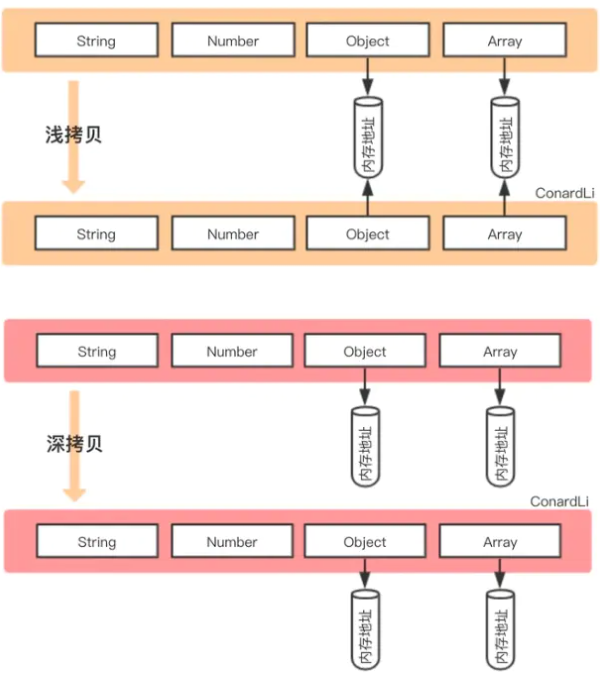
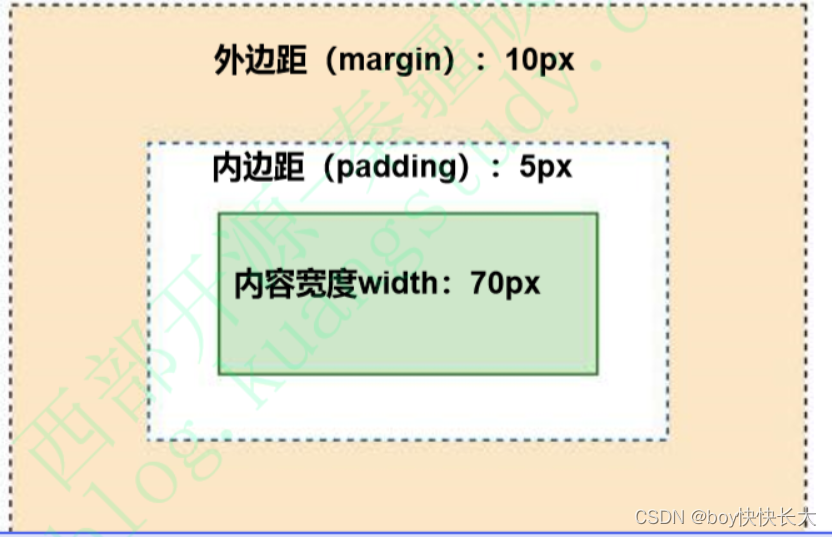
映像文件分为加载域(Load Region)和运行域(Execution Region)。一个加载域必须有至少一个运行域(可以有多个运行域),而一个程序又可以有多个加载域。加载域为映像程序的实际存储区域,而运行域则是MCU 上电后的运行状态。加载域和运行域的简化关系(这里仅表示一个加载域的情况)图,如图9.3.2.3.4 所示:
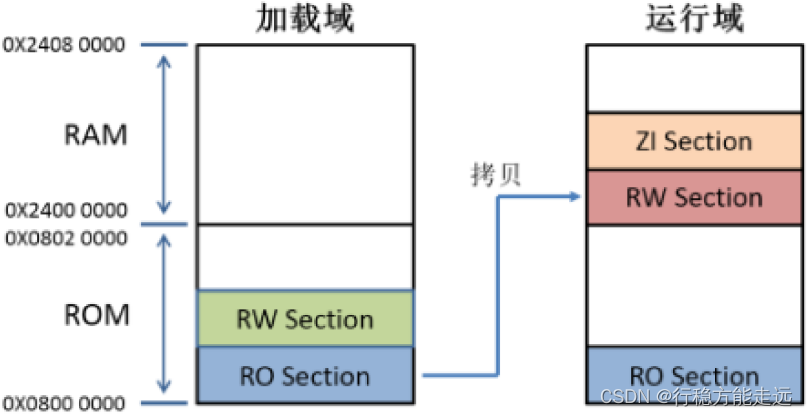
由图可知,RW 区也是存放在ROM(FLASH)里面的,在执行main 函数之前,RW(有初值且不为0 的变量)数据会被拷贝到RAM 区,同时还会在RAM 里面创建ZI 区(初始化为0 的变量)。
- 映像组件大小(Image component sizes)
映像组件大小(Image component sizes)给出了整个映像所有代码(.o)占用空间的汇总信息。这部分是程序实际功能可执行代码的存储空间。
由于篇幅较长,更多内容请大家查阅《STM32 MAP 文件浅析》文档的内容。