1.RTMP(实时消息传输协议)是Adobe 公司开发的一个基于TCP的应用层协议。
2.RTMP协议中基本的数据单元称为消息(Message)。
3.当RTMP协议在互联网中传输数据的时候,消息会被拆分成更小的单元,称为消息块(Chunk)。
(1). linux 环境准备
安装nginx 和 rtmp模块
下载nginx安装包
下载地址:http://nginx.org/download
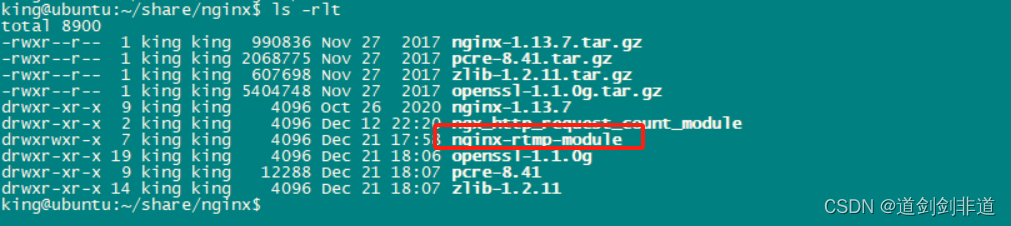
下载 rtmp模块 到nginx 模块下
wget https://github.com/arut/nginx-rtmp-module/archive/master.zip
(2)编译
到这个目录下
执行命令
./configure --prefix=/usr/local/nginx --with-http_realip_module --with-http_addition_module --with-http_ssl_module --with-http_gzip_static_module --with-http_secure_link_module --with-http_stub_status_module --with-stream --with-pcre=/home/king/share/nginx/pcre-8.41 --with-zlib=/home/king/share/nginx/zlib-1.2.11 --with-openssl=/home/king/share/nginx/openssl-1.1.0g --add-module=/home/king/share/nginx/ngx_http_request_count_module
make && sudo make install
修改 配置文件
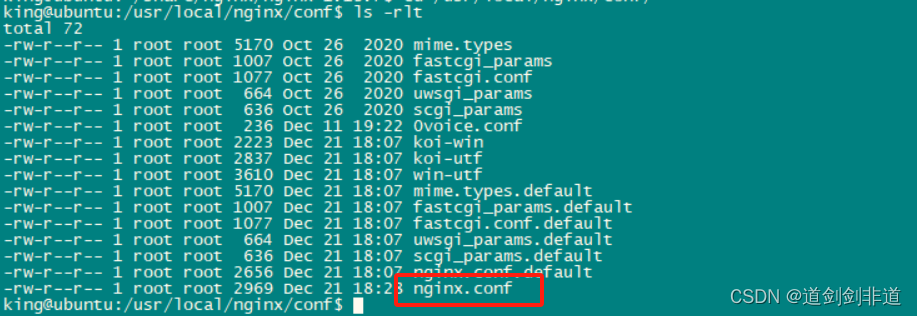
vim /usr/local/nginx/conf/nginx.conf
增加以下
rtmp {
server {
listen 1935; # 端口
chunk_size 4000;
application live { # 请求路径
live on;
}
}
}
配置完成启动服务
sudo ./sbin/nginx -c conf/nginx.conf
netstat -anop |grep 1935

push.h
#ifndef PUSHSTREAMTHREAD_H
#define PUSHSTREAMTHREAD_H
#include <QObject>
#include <QThread>
#include <QDebug>
extern "C" {
#include "libavdevice/avdevice.h" // 调用输入设备需要的头文件
#include "libavcodec/avcodec.h"
#include "libavformat/avformat.h"
#include "libavutil/avutil.h"
#include "libswscale/swscale.h"
#include "libavutil/imgutils.h"
#include "libavutil/pixfmt.h"
#include "libavutil/error.h"
#include "libswresample/swresample.h"
#include "libavfilter/avfilter.h"
#include "libavutil/time.h"
}
class PushStreamThread : public QThread
{
Q_OBJECT
public:
PushStreamThread(QThread *parent =nullptr);
~PushStreamThread();
void run() override;
void set_stop_flag(bool stop);
private:
bool stop_flag = false;
const AVOutputFormat *ofmt;
AVFormatContext *ifmt_ctx = nullptr; //输入上下文
AVFormatContext *ofmt_ctx = nullptr; //输出上下文
const char *in_filename;
const char *outUrl;
int ret;
uint32_t i = 0;
int videoIndex = -1;
int frame_index = 0;
int64_t start_time = 0;
};
#endif // PUSHSTREAMTHREAD_H
push.cpp
#include "pushstreamthread.h"
PushStreamThread::PushStreamThread(QThread *parent)
:QThread(parent)
{
avdevice_register_all();
avformat_network_init();
}
PushStreamThread::~PushStreamThread()
{
if(ifmt_ctx){
avformat_close_input(&ifmt_ctx);
}
if (ifmt_ctx && ofmt_ctx->pb && !(ofmt_ctx->flags & AVFMT_NOFILE))
avio_close(ofmt_ctx->pb);
if (ifmt_ctx) {
avformat_free_context(ofmt_ctx);
}
}
void PushStreamThread::run()
{
qDebug() << "run:" << QThread::currentThreadId();
//in_filename = "cuc_ieschool.mov";
//in_filename = "cuc_ieschool.mkv";
//in_filename = "cuc_ieschool.ts";
//in_filename = "cuc_ieschool.mp4";
//in_filename = "cuc_ieschool.h264";
in_filename = "hlzmj.mp4";//输入URL(Input file URL) video=ov9734_azurewave_camera test.mp4
//in_filename = "shanghai03_p.h264";
outUrl = "rtmp://192.168.222.92:1935/live";//输出 URL(Output URL)[RTMP] rtmp://localhost/publishlive/livestream
//out_filename = "rtp://233.233.233.233:6666";//输出 URL(Output URL)[UDP]
//const AVInputFormat *ifmt = av_find_input_format("dshow");
//AVDictionary *options = nullptr;
// av_dict_set(&options, "video_size", "640*480", 0);
// av_dict_set(&options, "framerate", "30", 0);
//输入(Input)
ret = avformat_open_input(&ifmt_ctx, in_filename, 0, 0);
if (ret < 0) {
qDebug() << "ifmt_ctx avformat_open_input failed:" << ret;
return;
}
ret = avformat_find_stream_info(ifmt_ctx, 0);
if (ret < 0) {
qDebug()<< "ifmt_ctx avformat_find_stream_info failed:"<< ret;
return;
}
ret = avformat_alloc_output_context2(&ofmt_ctx, NULL, "flv", outUrl);
if (ret < 0)
{
qDebug() << "ofmt_ctx avformat_alloc_output_context2 failed";
return;
}
ofmt = ofmt_ctx->oformat;
for (i = 0; i < ifmt_ctx->nb_streams; i++)
{
//这里开始要创建一个新的AVStream
AVStream *stream = ifmt_ctx->streams[i];
//判断是否是videoIndex。这里先记录下视频流。后面会对这个流进行操作
if (stream->codecpar->codec_type == AVMEDIA_TYPE_VIDEO)
{
videoIndex = i;
}
//创建输出流
const AVCodec *c = avcodec_find_decoder(stream->codecpar->codec_id);
AVStream *os = avformat_new_stream(ofmt_ctx, c);
//应该将编解码器的参数从input中复制过来
// 这里要注意的是,因为 os->codec这样的取法,已经过时了。所以使用codecpar
ret = avcodec_parameters_copy(os->codecpar, stream->codecpar);
if (ret < 0)
{
qDebug() << "ofmt_ctx os->codecpar avcodec_parameters_copy failed";
return;
}
qDebug() << "avcodec_parameters_copy success!" ;
qDebug() << "avcodec_parameters_copy success! in stream codec tag" << stream->codecpar->codec_tag;
qDebug() << "avcodec_parameters_copy success! out stream codec tag" << os->codecpar->codec_tag ;
//复制成功之后。还需要设置 codec_tag(编码器的信息?)
os->codecpar->codec_tag = 0;
}
//检查一遍我们的输出
av_dump_format(ofmt_ctx, 0, outUrl, 1);
//开始使用io进行推流
//通过AVIO_FLAG_WRITE这个标记位,打开输出的AVFormatContext->AVIOContext
ret = avio_open(&ofmt_ctx->pb, outUrl, AVIO_FLAG_WRITE);
if (ret < 0)
{
qDebug() << "ofmt_ctx->pb avio_open failed" << ret;
return;
}
qDebug() << "avio_open success!";
//先写头
ret = avformat_write_header(ofmt_ctx, 0);
if (ret < 0)
{
qDebug() << "ofmt_ctx avformat_write_header failed" << ret;
return;
}
//取得到每一帧的数据,写入
AVPacket pkt;
//为了让我们的代码发送流的速度,相当于整个视频播放的数据。需要记录程序开始的时间
//后面再根据,每一帧的时间。做适当的延迟,防止我们的代码发送的太快了
long long start_time = av_gettime();
//记录视频帧的index,用来计算pts
long long frame_index = 0;
while (!stop_flag)
{
//输入输出视频流
AVStream *in_stream, *out_stream;
//从输入流中读取数据 frame到AVPacket当中
ret = av_read_frame(ifmt_ctx, &pkt);
if (ret < 0)
{
qDebug() << "ifmt_ctx av_read_frame break";
break;
}
//没有显示时间的时候,才会进入计算和校验
//没有封装格式的裸流(例如H.264裸流)是不包含PTS、DTS这些参数的。在发送这种数据的时候,需要自己计算并写入AVPacket的PTS,DTS,duration等参数。如果没有pts,则进行计算
if (pkt.pts == AV_NOPTS_VALUE)
{
//AVRational time_base:时基。通过该值可以把PTS,DTS转化为真正的时间。
//先得到流中的time_base
AVRational time_base = ifmt_ctx->streams[videoIndex]->time_base;
//开始校对pts和 dts.通过time_base和dts转成真正的时间
//得到的是每一帧的时间
/*
r_frame_rate 基流帧速率 。取得是时间戳内最小的帧的速率 。每一帧的时间就是等于 time_base/r_frame_rate
av_q2d 转化为double类型
*/
int64_t calc_duration = (double)AV_TIME_BASE / av_q2d(ifmt_ctx->streams[videoIndex]->r_frame_rate);
//配置参数 这些时间,都是通过 av_q2d(time_base) * AV_TIME_BASE 来转成实际的参数
pkt.pts = (double)(frame_index * calc_duration) / (double)av_q2d(time_base) * AV_TIME_BASE;
//一个GOP中,如果存在B帧的话,只有I帧的dts就不等于pts
pkt.dts = pkt.pts;
pkt.duration = (double)calc_duration / (double)av_q2d(time_base) * AV_TIME_BASE;
}
//开始处理延迟.只有等于视频的帧,才会处理
if (pkt.stream_index == videoIndex)
{
//需要计算当前处理的时间和开始处理时间之间的间隔??
//0.先取时间基数
AVRational time_base = ifmt_ctx->streams[videoIndex]->time_base;
//AV_TIME_BASE_Q 用小数表示的时间基数。等于时间基数的倒数
AVRational time_base_r = { 1, AV_TIME_BASE };
//计算视频播放的时间. 公式等于 pkt.dts * time_base / time_base_r`
//.其实就是 stream中的time_base和定义的time_base直接的比例
int64_t pts_time = av_rescale_q(pkt.dts, time_base, time_base_r);
//计算实际视频的播放时间。 视频实际播放的时间=代码处理的时间??
int64_t now_time = av_gettime() - start_time;
qDebug() << time_base.num << " " << time_base.den << " " << pkt.dts << " " << pkt.pts << " " << pts_time;
//如果显示的pts time 比当前的时间迟,就需要手动让程序睡一会,再发送出去,保持当前的发送时间和pts相同
if (pts_time > now_time)
{
//睡眠一段时间(目的是让当前视频记录的播放时间与实际时间同步)
av_usleep((unsigned int)(pts_time - now_time));
}
}
//重新计算一次pts和dts.主要是通过 in_s的time_base 和 out_s的time_base进行计算和校对
//先取得stream
in_stream = ifmt_ctx->streams[pkt.stream_index];
out_stream = ofmt_ctx->streams[pkt.stream_index];
//重新开始指定时间戳
//计算延时后,重新指定时间戳。 这次是根据 in_stream 和 output_stream之间的比例
//计算dts时,不再直接用pts,因为如有有B帧,就会不同
//pts,dts,duration都也相同
pkt.pts = av_rescale_q_rnd(pkt.pts, in_stream->time_base, out_stream->time_base, (AVRounding)(AV_ROUND_NEAR_INF | AV_ROUND_PASS_MINMAX));
pkt.dts = av_rescale_q_rnd(pkt.dts, in_stream->time_base, out_stream->time_base, (AVRounding)(AV_ROUND_NEAR_INF | AV_ROUND_PASS_MINMAX));
pkt.duration = (int)av_rescale_q(pkt.duration, in_stream->time_base, out_stream->time_base);
//再次标记字节流的位置,-1表示不知道字节流的位置
pkt.pos = -1;
//如果当前的帧是视频帧,则将我们定义的frame_index往后推
if (pkt.stream_index == videoIndex)
{
qDebug() << "Send" << frame_index << "video frames to output URL" ;
frame_index++;
}
//发送!!!
ret = av_interleaved_write_frame(ofmt_ctx, &pkt);
if (ret < 0)
{
qDebug() << "发送数据包出错";
break;
}
//使用完了,记得释放
av_packet_unref(&pkt);
}
//写文件尾(Write file trailer)
av_write_trailer(ofmt_ctx);
if(ifmt_ctx){
avformat_close_input(&ifmt_ctx);
}
if (ofmt_ctx && ofmt_ctx->pb && !(ofmt_ctx->flags & AVFMT_NOFILE))
avio_close(ofmt_ctx->pb);
if (ifmt_ctx) {
avformat_free_context(ofmt_ctx);
}
}
void PushStreamThread::set_stop_flag(bool stop)
{
stop_flag = stop;
}
使用 vcl 播放流