datitle: Python Module&&Invoking
date: 2020-05-12 00:16:58
img: https://gitee.com/github-25970295/blogImage/raw/master/img/woman-3219507__340.webp
categories: 编程语言
reprintPolicy: cc_by
cover: false
tags:
- python
无论我们选择用何种语言进行程序设计时,都不可能只有一个文件(除了“hello world”),通常情况下,我们都需要在一个文件中调用另外一个文件的函数呀数据等等,总之要操作其他文件中的代码,在java中,只要在同一个文件目录下,我们就不需要通过import导入,但是在Python中,我们就需要通过import来进行导入,这样我们才能应用其他文件中定义的函数和数据等代码。
1. Python 调用
1.1. 同一目录
调用函数
# A.py
def add(x,y):
print("xxx")
# B.py
import A
A.add(1,2)
#或者
from A import add
add(1,2)
调用类
# A.py
class A:
def __init__(self,xx,yy):
self.x=xx
self.y=yy
def add(self):
print("x和y的和为:%d"%(self.x+self.y))
# B.py
from A import A
a=A(2,3)
a.add()
#或者
import A
a=A.A(2,3)
a.add()
1.2. 不同目录
若不在同一目录,python查找不到,必须进行查找路径的设置,将模块所在的文件夹加入系统查找路径
注意: import 是从项目文件夹开始的
import sys
sys.path.append(‘a.py所在的路径’)
import a
a.func()
2. 模块调用
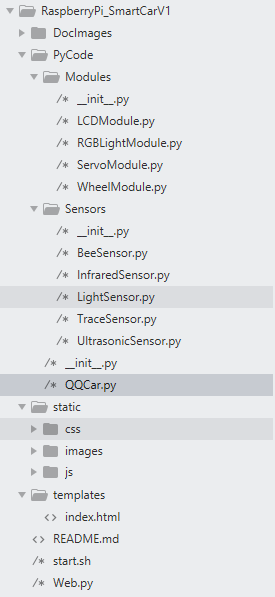
而一个package跟一个普通文件夹的区别在于,package的文件夹中多了一个__init__.py文件。换句话说,如果你在某个文件夹中添加了一个__init__.py文件,则python就认为这个文件夹是一个python中的package。
# 假设 文件目录如下
- mod_a
__init__.py # 模块文件夹内必须有此文件
aaa.py
- mod_b
__init__.py # 模块文件夹内必须有此文件
bbb.py
- ccc.py
2.1. 调用同级模块
import sys
sys.path.append(os.path.join(os.path.dirname(__file__), '..')) # 扫除路径迷思的关键!
from mod_b.bbb import *
2.1. 调用上级模块
import sys
sys.path.append(os.path.join(os.path.dirname(__file__), '..'))
from ccc import *
3. 功能模块化编写
###################################################
# 智能小车1.0 -- 舵机模块
###################################################
import RPi.GPIO as GPIO
import time
class ServoModule:
# 初始模块
def __init__(self, PIN):
print('Servo Module In Progress')
GPIO.setmode(GPIO.BOARD)
self.PIN = PIN
#initial 是启动引脚设置初始
# 舵机左转
def turnLeft(self):
self.pwm = GPIO.PWM(self.PIN, 50)
# 舵机右转
def turnRight(self):
self.pwm = GPIO.PWM(self.PIN, 50)
self.pwm.start(0)
if __name__ == "__main__":
try:
# 19,21,23
m = ServoModule(19)
except KeyboardInterrupt:
pass
GPIO.cleanup()
###################################################
# 智能小车1.0
###################################################
# 光敏传感器 红 黑 任意
# 超声波传感器-发送 红 黑 任意 * 2
# 超声波传感器-接收
# 红外避障传感器-左 红 黑 任意
# 红外避障传感器-右 红 黑 任意
# 无源蜂鸣器 红 黑 任意
# 寻迹传感器 红 黑 任意
# 七彩大灯R-G-B 黑 任意 * 3
# 超声波云台舵机-左右转 任意
# 摄像头云台舵机-左右转 红 黑 任意
# 摄像头云台舵机-上下转 红 黑 任意
# 左轮in1-in2 任意 * 2
# 右轮in1-in2 任意 * 2
# 接电:红 8
# 接地:黑 9
# 其他:17
import threading
import os
from PyCode.Modules.RGBLightModule import *
from PyCode.Modules.ServoModule import *
##----------小车对外提供的功能
class QQCar:
def __init__(self):
# 初始化智能小车使用控制脚--------------
self.PIN_LIGHT = 8 # 01:光敏
self.PIN_ULTRASON_TRIG = 11 # 02:超声波-发射
# 超声波云台,右转
def servoUltrasonicTurnRight(self):
self.servoModule_U.turnRight()
# 摄像头水平云台,左转
def servoCameraHTurnLeft(self):
self.servoModule_CH.turnLeft()







![[OC学习笔记]启动流程](https://img-blog.csdnimg.cn/29d971ee750649b5aa9e8d537e5d7f20.png)