在Windows安装Airsim/UE4踩坑合集
- 1.安装过程中一定要确保Epic Games Launcher是英文环境,保存路径什么的也尽量是英文。
- 2.UE4中的虚幻引擎一定要安装4.27版本以上的,不然的话最后运行vs的时候会报语法错误,网上根本查不到的那种错误。换了版本之后就正常了。
- 3.Block环境测试的时候:运行指令 `update_from_git.bat` 的时候报错很多文件找不到
- 4.成功在vs2022中运行Blocks.sln之后,程序自动打开UE4引擎,然后点击运行,理论上图像应该出现一架无人机以及球体和锥体。
具体步骤参考知乎大佬宁子安的文章:
https://zhuanlan.zhihu.com/p/618440744
或者是airsim官方网站的步骤:
https://microsoft.github.io/AirSim/build_windows/
我这里写几个自己安装过程中踩的坑和报的错:
1.安装过程中一定要确保Epic Games Launcher是英文环境,保存路径什么的也尽量是英文。
2.UE4中的虚幻引擎一定要安装4.27版本以上的,不然的话最后运行vs的时候会报语法错误,网上根本查不到的那种错误。换了版本之后就正常了。
我运行正常的版本为:
win10 vs2022 UE4(4.27.2) Airsim 1.8.1
3.Block环境测试的时候:运行指令 update_from_git.bat 的时候报错很多文件找不到
问题在于没有关联虚幻引擎与Airsim,所以没有办法生成测试文件。
解决步骤:
-
一定要确保Epic Games Launcher是英文语言
-
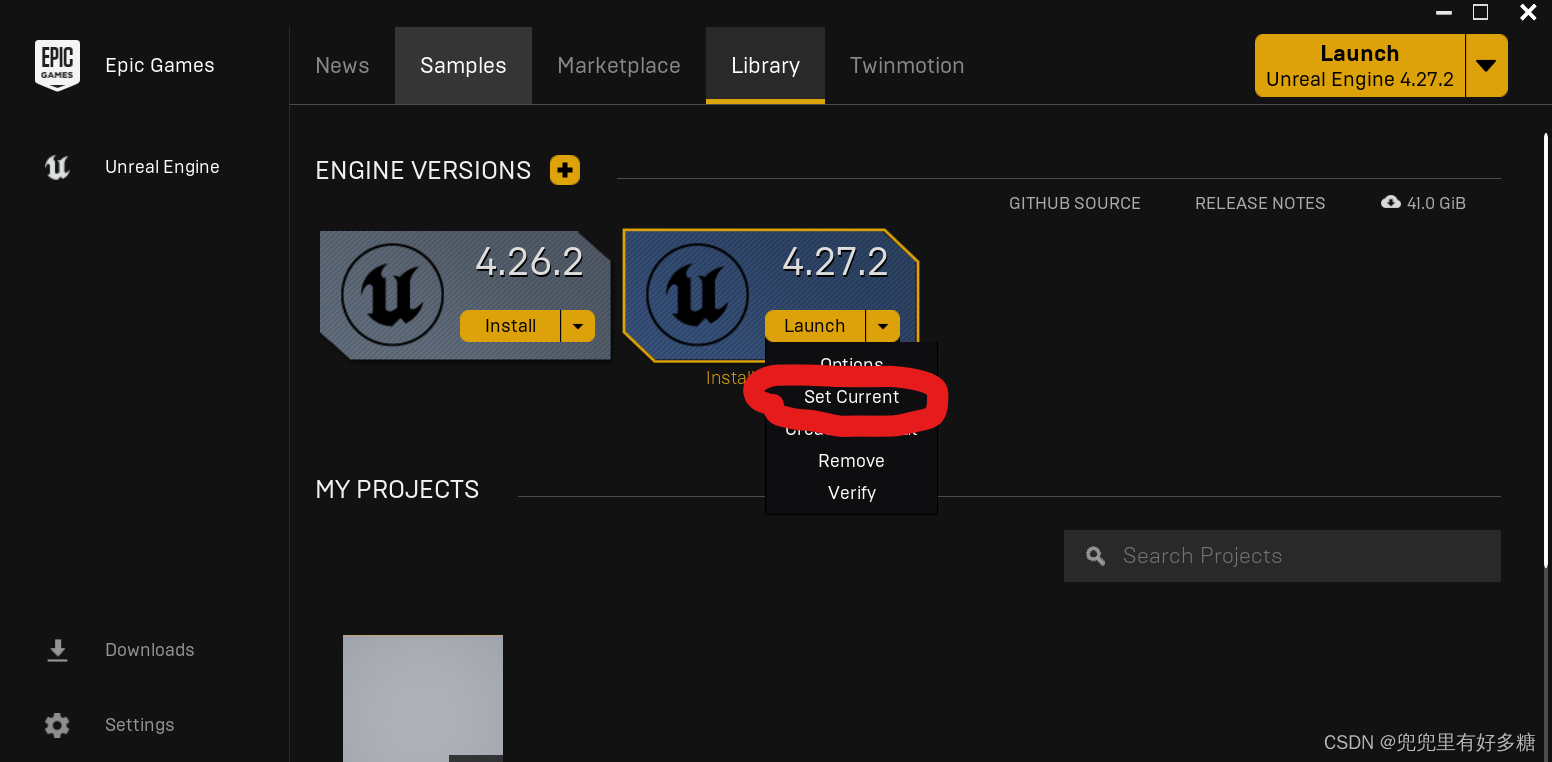
把你已经下载好的虚幻引擎设为启动项:
-
重启Epic Games Launcher,会弹出一个让你关联的对话框,点确定即可。
-
重新运行
update_from_git.bat,即可成功生成Blocks.sln工程文件
4.成功在vs2022中运行Blocks.sln之后,程序自动打开UE4引擎,然后点击运行,理论上图像应该出现一架无人机以及球体和锥体。
但是我当时报了这个错:Error at startup: Error creating directory, hr=2
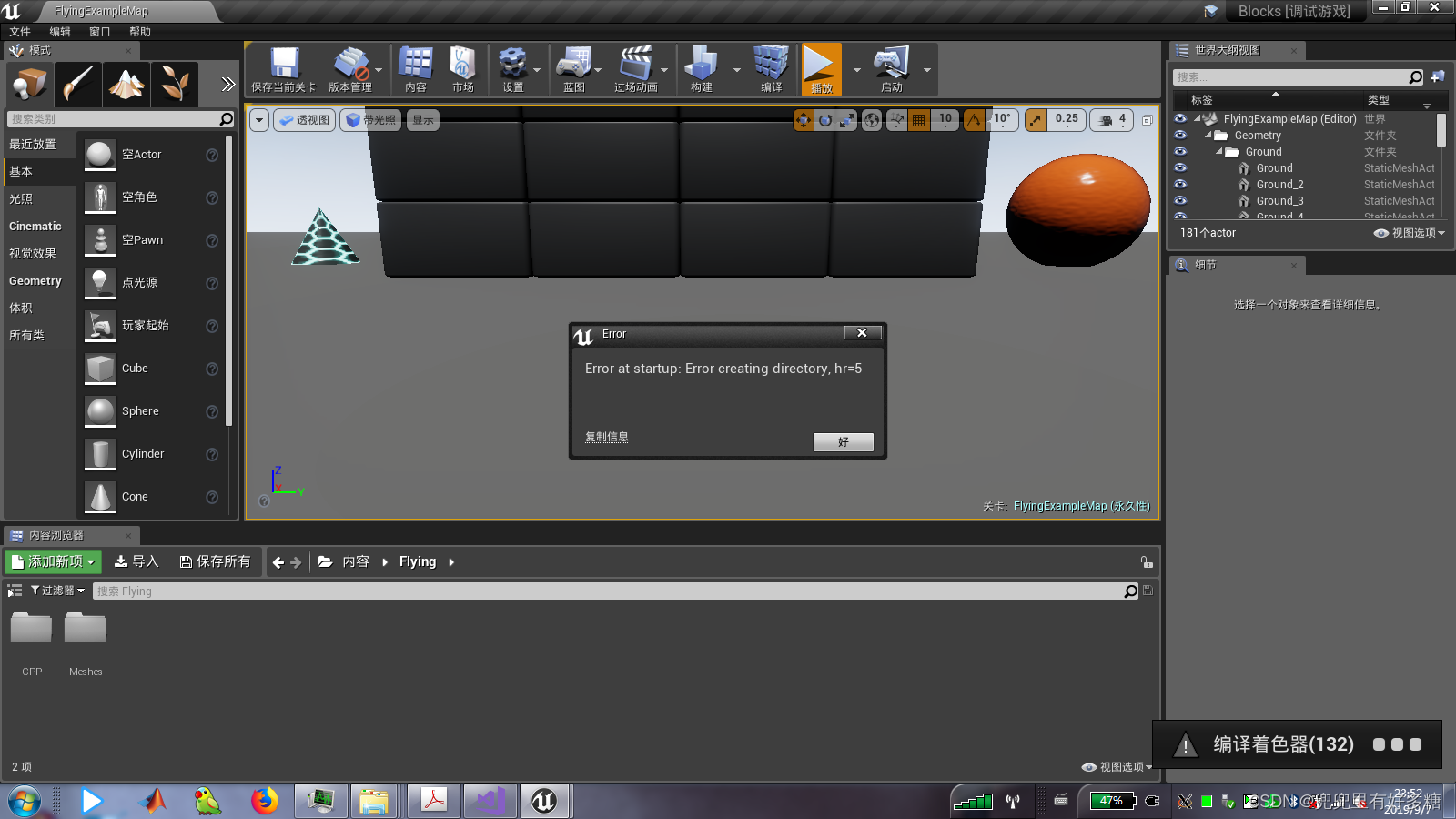
然后点击“OK”之后不出现无人机,其他一切正常。
github上有解决这个问题的人:
https://github.com/microsoft/AirSim/issues/1150
简单地说,就是运行这个工程文件需要有一个settings.json文件支撑这个工程,配置该工程中的各种参数。但是很明显虚幻引擎现在找不到这个文件,无法读取这个文件中的配置。
所谓的““error creating directory””实际意思就是UE或者airsim没有办法生成文件夹去放置settings.json文件。
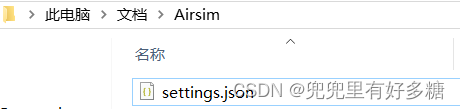
正常情况下,是应该由程序自动生成一个settings.json文件在:"C:\Users\asus\Documents\Airsim"这个目录下面的。但是我们目前手动去找一下发现确实没有。
所以解决办法就是:
在"C:\Users\asus\Documents"这个目录下面手动新建一个“Airsim”文件夹
然后在其中新建一个文本文件,复制下面的代码:
{
"SettingsVersion": 1.2,
"SimMode": "Multirotor"
}
保存之后,修改后缀名为.json
再次在UE4中点击“运行”按钮即可成功。成功出现无人机,场景也变得正常了。
如果想配置其他的功能,比如加上三个不同摄像头角度的窗口,如图:
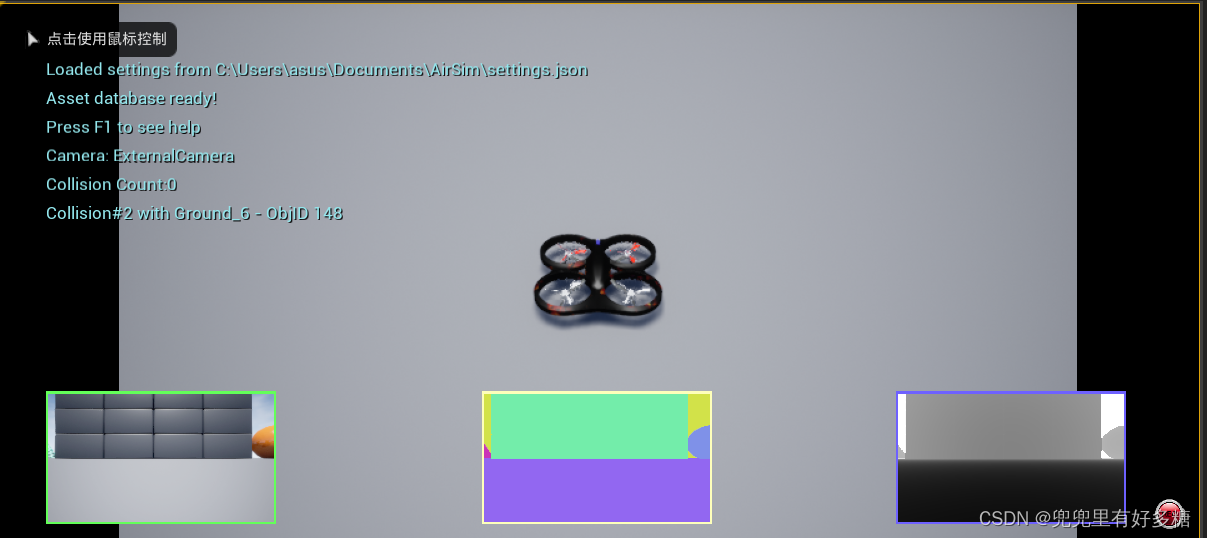
就可以修改settings.json文件为:
{
"SettingsVersion": 1.2,
"SimMode": "Multirotor",
"SubWindows": [
{"WindowID": 0, "CameraName": "front_center", "ImageType": 0, "VehicleName": "", "Visible": true},
{"WindowID": 1, "CameraName": "front_center", "ImageType": 5, "VehicleName": "", "Visible": true},
{"WindowID": 2, "CameraName": "front_center", "ImageType": 3, "VehicleName": "", "Visible": true}
]
}
至此就没什么其他问题了,Airsim就算安装运行以及测试成功了。