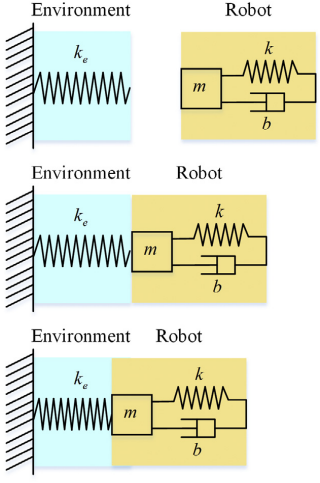
当机械臂快速接触刚性环境时,阻抗对相互作用力的影响尤为显著。由于刚性环境对机械臂产生的阻力,机械臂在接触时会受到一个与运动方向相反的作用力,即接触力。阻抗参数的设置对接触力的大小具有重要影响。
一方面,阻尼参数决定了系统吸收能量的能力。在快速接触过程中,阻尼较大的机械臂能够吸收更多的碰撞能量,从而减小对刚性环境的冲击力。适当的阻尼设置有助于减小接触力,提高系统的稳定性和安全性。
另一方面,刚度参数决定了机械臂抵抗变形的能力。在刚性环境中,较高的刚度会导致机械臂在接触时产生较大的变形应力,可能导致较大的接触力。而较低的刚度可以使机械臂在碰撞时发生较小的变形,吸收更多的能量,从而减小接触力。
此外,控制系统的响应速度和算法的优化程度也会影响机械臂与刚性环境碰撞时的相互作用力。优化的控制算法可以更好地调节机械臂的运动状态,减小碰撞时的冲击力。同时,提高控制系统的响应速度可以使机械臂更快地适应外力的变化,进一步减小接触力。
为了在较快的碰撞刚性环境下保证接触力较小,阻抗参数的设置需要考虑以下几个因素:
- 刚度参数:选择一个相对较低的刚度值,以允许机器人在碰撞时具有一定的变形能力。较低的刚度可以减小接触力,同时也有助于吸收碰撞能量。建议将刚度值设置在10-50N/mm的范围内,具体取决于机械臂的材料、结构和碰撞速度。
- 阻尼参数:适当的阻尼可以有效地吸收碰撞能量,从而减小接触力。在选择阻尼参数时,需要找到一个平衡点,以确保机器人能够快速响应控制信号,同时又能有效地吸收碰撞能量。建议将阻尼参数设置为0.01-0.1之间的值,具体取决于机械臂的结构和碰撞条件。
- 质量参数:质量参数对机器人的动态特性和接触力有一定影响。在设置质量参数时,需要综合考虑机械臂的质量和碰撞速度。选择一个与机械臂实际质量相近的值,可以更好地模拟机器人的动态行为,并提高轨迹跟踪控制的精度。
- 低刚度环境:当机械臂与低刚度的环境(如软质材料或弹性表面)交互时,可以设置较低的刚度参数和适中的阻尼参数。例如,刚度可以设置在10-50 N/mm的范围内,阻尼可以设置在0.1-0.5的范围内。这样的设置允许机械臂在接触时发生一定的变形,以减小接触力。
- 中刚度环境:在与中等刚度的环境(如金属表面或硬质塑料)交互时,可以适当增加刚度参数和阻尼参数。刚度可以设置在50-200 N/mm的范围内,阻尼可以设置在0.5-1.0的范围内。这样的设置可以平衡机械臂的稳定性和接触力的大小。
- 高刚度环境:当机械臂与非常刚性的环境(如岩石或硬质金属)交互时,可以设置较高的刚度参数和较大的阻尼参数。刚度可以设置在200-500 N/mm的范围内,阻尼可以设置在1.0-2.0的范围内。这样的设置有助于减小机械臂在碰撞时的振动和接触力。


Duan, J., Gan, Y., Chen, M., & Dai, X. (2018). Adaptive variable impedance control for dynamic contact force tracking in uncertain environment. Robotics and Autonomous Systems, 102, 54-65.






![概率中的50个具有挑战性的问题[02/50]:连续获胜](https://img-blog.csdnimg.cn/img_convert/fab2aae23fd92fec5d5018ff37b32af2.png)
![[c]扫雷](https://img-blog.csdnimg.cn/img_convert/b1a6522aec2533493b917d7ee6d245cd.png)