https://blog.csdn.net/weixin_26752765/article/details/108132661
翻译自
https://darshanhegde.github.io/blog/2020/heuristics-for-robotic-grasping/
讲述了各种抓取
https://rpal.cse.usf.edu/competition_iros2021/
Grasping is one of the fundamental subtask of a robotic manipulation
pipeline. Both learning based and physics / geometry based grasping
methods can benefit from grasp sampling heuristics in this article.
Even if you are using a large arm farm to teach your robots the skills
of grasping, you can save your robots quite a lot of time with these
heuristics. This article summarizes the most common grasp sampling
heuristics used in literature.
Heuristics For Robotic Grasping
June 10, 2020
This article contains heuristics for following:
Parallel jaw grasps.
Suction grasps.
Linear push policies for improving parallel jaw grasps.
Toppling policies for improving suction grasps.
Grasping is one of the fundamental subtask of a robotic manipulation pipeline. Both learning based and physics / geometry based grasping methods can benefit from grasp sampling heuristics in this article. Even if you are using a large arm farm to teach your robots the skills of grasping, you can save your robots quite a lot of time with these heuristics. This article summarizes the most common grasp sampling heuristics used in literature.
Some of the common ways to use these heuristics are:
Generating labels for learning based grasp planners (offline): 6-DOF
GraspNet [4] uses these samplers for evaluation with physics based
simulation. Grasps that retain the object between the gripper are
considered successful after a predefined shaking motion. DexNet [2][3]
evaluates these grasps based on analytic quasi-static grasp wrench
space (GWS) analysis. Both methods score these sampled grasps based on
how good they are in resisting disturbances. These scores are used as
labels for training the grasp planners. During grasp synthesis
(inference): DexNet [2][3] uses these sampled grasps as seeds for
Cross Entropy Method (CEM), and optimizes grasps based on predicted
grasp quality from GQ-CNN (Grasp Quality Convolutional Network).
Traditional geometric methods, prune these candidate grasps if they
are kinematically infeasible or if they result in collision between
gripper and other objects or environment. The best of these samples
are picked for execution. We will summarize the details of heuristics
for each type of grippers used for manipulation.
Approach based samplers:
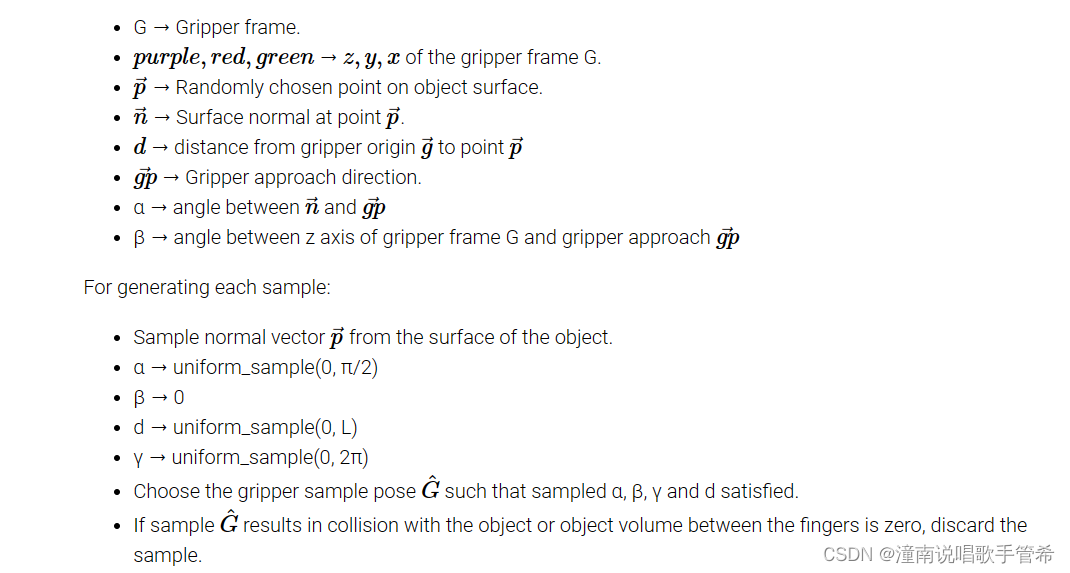
These methods are characterized by approach vector of the gripper (red-dashed line) which typically aligns with normal to the palm (purple axis).
Approach based sampler. Picture Credit: Billion ways to Grasp [1]
Pseudo code for approach based sampler:
Notations: