凸优化1
- 优化问题的形式
- 优化问题类别1:凸函数 和 非凸函数
- 优化问题类别2:带条件 和 无条件
- 优化问题类别3:离散 和 连续
- 优化问题类别4:平滑 和 非平滑
- 如何判断一个目标函数是凸函数,还是非凸函数?
- 怎么设计模型为凸函数?
- 怎么求解非凸函数?
- 怎么对非凸函数松弛,变成凸函数?
基本上,机器学习就是 模型 + 优化。
重要性亦如,程序 = 数据结构 + 算法,缺一不可。
如果你只学模型,你就缺了一条腿,走的不稳不快,没核心竞争力。
学了凸优化,看论文就会很轻松,就能理解数学公式在做什么,就喜欢看数学公式了。
就和别的数学不一样,你学了在应用里基本用不到,但你会凸优化,你可以根据任务改更好的损失函数、在原有模型上创新。
应用优化、科研论文必备。
优化问题的形式
任何一个优化问题都可以写成:
M i n i m i z e f 0 ( x ) f i < = 0 , g j ( x ) = 0. Minimizef_{0}(x) \\f_{i}<=0, \\g_{j}(x)=0. Minimizef0(x)fi<=0,gj(x)=0.
-
M i n i m i z e f 0 ( x ) Minimize f_0(x) Minimizef0(x): 这是凸优化问题的目标,表示我们的目的是找到一个变量
x的值,使得函数 f 0 ( x ) f_0(x) f0(x) 的值尽可能小。 -
f i ( x ) < = 0 f_i(x) <= 0 fi(x)<=0: 这些是所谓的不等式约束。 f i ( x ) f_i(x) fi(x) 表示不同的函数,每个函数都有一个对应的不等式。
i的范围是从1到某个整数,它表示有多少个这样的约束。这些约束限制了解决方案的可行性,即我们不能随便选择任何值来最小化 f 0 ( x ) f_0(x) f0(x);解决方案必须使所有的 f i ( x ) f_i(x) fi(x) 都小于或等于0。 -
g j ( x ) = 0 g_j(x) = 0 gj(x)=0: 是等式约束,用 g j ( x ) g_j(x) gj(x) 表示。
j的范围同样表示有多少个这样的约束。等式约束必须被严格遵守,意味着解决方案必须使所有的 g j ( x ) g_j(x) gj(x) 恰好等于0。
将这些信息放在一起,我们可以这样理解这个公式:我们的目标是找到一组变量x的值,这组值不仅要使目标函数
f
0
(
x
)
f_0(x)
f0(x) 的值最小化,而且还要满足所有的不等式约束
f
i
(
x
)
<
=
0
f_i(x) <= 0
fi(x)<=0 和所有的等式约束
g
j
(
x
)
=
0
g_j(x) = 0
gj(x)=0。
这就像是你在玩一场游戏,目标是得分最低(最小化f_0(x)),同时你必须遵守游戏的规则(满足不等式和等式约束)。
优化问题类别1:凸函数 和 非凸函数

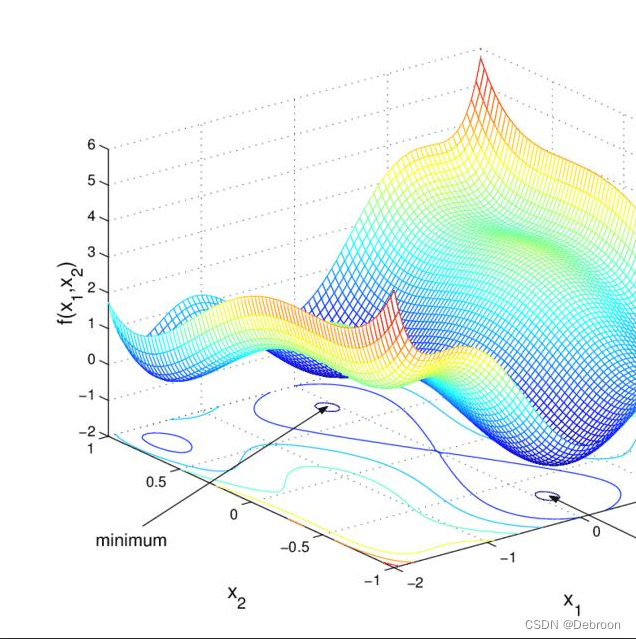
想象山的形状,就像一个凸形的曲线。
如果你在凸形的曲线里面放一个小球,无论小球在哪个位置,它最终都会滚到最低点。
在数学中,这个凸形的曲线就可以用凸函数来描述。
凸函数的优化问题非常重要,因为它们通常有唯一的最低点(全局最小值),就像碗底一样。
所以,当你的目标是最小化一个凸函数时,你可以使用任意的算法(比如梯度下降法)来寻找这个全局最小值,而不用担心找到一个“伪”最小值(局部最小值)。
但如果是非凸函数,会有很多局部最小值,要选择合适的算法,但也不容易找到全局最小值。
在处理非凸函数优化时,可以采取以下几种策略:
-
局部搜索方法:这类方法从某个初始点出发,通过迭代的方式尝试找到局部最优解。例如梯度下降、牛顿法等。它们通常会收敛到最近的局部最小值,但不保证找到全局最小值。
-
全局优化算法:这些算法旨在搜索整个函数空间以找到全局最小值。例如模拟退火、遗传算法、粒子群优化等。这些方法可能会消耗更多的计算资源,但更有可能接近或找到全局最优解。
-
启发式方法:这类方法包括对问题的特殊理解和创造性的算法设计,如分枝定界、割平面方法等。它们通常利用问题的特定结构来缩小搜索范围并找到更好的解。
-
凸松弛:当面对一个难以直接解决的非凸问题时,可以尝试将其松弛为一个凸问题,例如通过引入额外的变量或者放松一些约束条件。这样虽然可能无法得到原问题的精确解,但可以获得一个近似解,有时这个近似解足够接近真实的全局最优解。
-
集成方法:将上述方法组合使用,例如先用全局优化算法找到一个不错的起点,然后再使用局部搜索方法进行精细调整。
优化问题类别2:带条件 和 无条件
这种类别的优化问题就像是你在玩一个游戏,但是有一些规则限制你的动作。
在数学中,这些规则被称为约束条件。
这些约束可以是等式(比如,你需要在一个特定的预算内花费),也可以是不等式(比如,你不能超过一定的重量或体积)。
当你的目标是找到某个函数的最大值或最小值,但同时要满足一些额外的条件时,你就面临着一个带条件的优化问题。
这种问题需要特别的技巧来解决,因为你不能只关注函数值的优化,还要确保所有的约束都得到满足。
线性规划和非线性规划就是处理这类问题的常用方法。
优化问题类别3:离散 和 连续
这个类别的区分是根据优化问题的变量是离散的还是连续的。
离散就像计数一样,你可以数1、2、3,但不能数1.5、2.5等。
而连续则像用尺子量长度一样,可以量到任何小数点后的值。
离散优化问题通常涉及整数、图或网络等,在这类问题中,变量只能取有限的、分开的值。
举个例子,旅行商问题就是一个经典的离散优化问题,你需要找到一条路径,经过一系列城市一次且仅一次,并最终回到起点,同时路径长度最短。
连续优化问题中,变量可以在某个区间内任意取值。
比如,在设计一座桥时,你可能会调整桥的长度、宽度和曲率,这些都是连续的变量,你需要找到最佳的组合,以确保桥既安全又经济。
优化问题类别4:平滑 和 非平滑
平滑优化问题是指目标函数具有良好的数学性质,特别是它们在定义域内是连续可导的,这意味着它们有着连续的梯度(或者说斜率)。
你画这样一个函数的图像,你会得到一个光滑的曲线或曲面,没有任何尖锐的拐点或者断点。
这种光滑性让函数容易使用基于梯度的方法来优化,因为你可以通过计算梯度(梯度下降法或牛顿法等)来找到函数值上升或下降最快的方向。
常见的平滑函数包括多项式函数、指数函数和对数函数。
非平滑优化问题中的目标函数可能不是处处连续可导的,这意味着函数的图像可能有尖角、棱角或者不连续的跳跃。
你画这样一个函数的图像,你的笔在某些点上可能需要“跳过”一个间断,或者在转角处突然改变方向。
非平滑优化问题通常更难处理,因为没有连续的梯度信息可以指导优化过程,因此可能需要使用更复杂的算法,如次梯度方法、近似梯度方法或者基于非梯度的优化策略或启发式算法来求解。
常见的例子包括绝对值函数、最大值/最小值函数(如ReLU激活函数)。
最简单的情况是:无条件、凸函数、连续、平滑,这种情况特别好算的。
像其他复杂的情况,那需要学习各个优化算法了。
如何判断一个目标函数是凸函数,还是非凸函数?
判断一个函数是凸函数还是非凸函数可以采用以下两种方法:
- 通过二阶导数
- 利用凸性定义
方法一:通过二阶导数判断
对于一元函数,可以通过判断其二阶导数的符号来判断函数的凸性:
- 如果函数的二阶导数在定义域内始终大于等于零(即非负),则该函数是凸函数。
- 如果函数的二阶导数在定义域内始终小于等于零(即非正),则该函数是凹函数。
对于多元函数,可以通过计算其海森矩阵(Hessian Matrix)来判断函数的凸性:
- 如果海森矩阵在定义域内始终半正定(即所有特征值非负),则该函数是凸函数。
- 如果海森矩阵在定义域内始终半负定(即所有特征值非正),则该函数是凹函数。
方法二:利用凸性定义
函数的凸性定义如下:
- 对于一元函数,如果对于任意的 x1、x2 ∈ 定义域内,以及任意的 t ∈ [0, 1],都有 f ( t x 1 + ( 1 − t ) x 2 ) ≤ t f ( x 1 ) + ( 1 − t ) f ( x 2 ) f(tx1 + (1-t)x2) ≤ tf(x1) + (1-t)f(x2) f(tx1+(1−t)x2)≤tf(x1)+(1−t)f(x2),则该函数是凸函数。
- 对于多元函数,如果对于任意的 x1、x2 ∈ 定义域内,以及任意的 t ∈ [0, 1],都有 f ( t x 1 + ( 1 − t ) x 2 ) ≤ t f ( x 1 ) + ( 1 − t ) f ( x 2 ) f(tx1 + (1-t)x2) ≤ tf(x1) + (1-t)f(x2) f(tx1+(1−t)x2)≤tf(x1)+(1−t)f(x2),则该函数是凸函数。
对于凸函数来说,任意两个点的连线上的函数值都不大于连线两端点的函数值。
可以通过绘制函数图像和观察函数的形状来帮助判断凸性。
- 如果图像向上凸起,那么函数是凸函数;
- 如果图像向下凹陷,那么函数是凹函数。







![助力智能车辆检测计数,基于官方YOLOv8全系列[n/s/m/l/x]开发构建道路交通场景下不同参数量级车流检测计数系统](https://img-blog.csdnimg.cn/direct/7a03b9a4ba1a4526b4119797ac1a5f08.jpeg)

![[Unity]接入Firebase 并且关联支付埋点](https://img-blog.csdnimg.cn/direct/f61583aa46db4b9bba06a73467242933.png)