Eigen::Quaterniond 是 Eigen C++ 库中用于表示四元数的类,四元数在计算机图形学、机器人学等领域中广泛用于表示旋转操作。
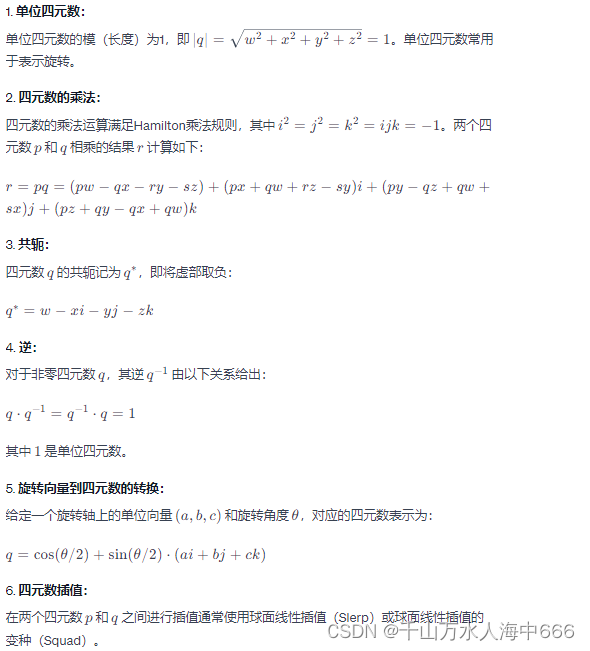
四元数是一种数学结构,通常用于表示和计算三维空间中的旋转。一个四元数由一个实部和三个虚部组成,可以写成如下形式:

主要性质和运算:
以下是如何使用 Eigen::Quaterniond 的基本概述:
1. 包含 Eigen 库:
确保在你的 C++ 代码中包含 Eigen 库。
#include <iostream>
#include <Eigen/Dense>
2. 创建四元数:
你可以使用 Eigen::Quaterniond 类创建一个四元数。例如:
int main() {
// 创建一个绕轴 (1, 0, 0) 旋转 90 度的四元数
Eigen::Quaterniond q;
q = Eigen::AngleAxisd(M_PI / 2, Eigen::Vector3d(1, 0, 0));
// 输出四元数
std::cout << "Quaternion:\n" << q.coeffs() << std::endl;
return 0;
}
3. 访问组成部分:
你可以使用不同的方法访问四元数的组成部分(实部和虚部)。coeffs() 函数返回一个向量,其中包含标量(实部)部分,然后是虚部分(i、j、k)。
// 访问标量(实部)部分
double scalarPart = q.w();
// 访问虚部分
Eigen::Vector3d imaginaryPart = q.vec();
4. 四元数的运算:
你可以执行各种与四元数相关的运算,如乘法、归一化和共轭。
// 两个四元数相乘
Eigen::Quaterniond q1, q2, result;
result = q1 * q2;
// 对一个四元数进行归一化
q.normalize();
// 对一个四元数进行共轭
Eigen::Quaterniond conjugate = q.conjugate();
5. 旋转一个向量:
你可以使用四元数来旋转一个三维向量。
Eigen::Vector3d vectorToRotate(1, 0, 0);
Eigen::Vector3d rotatedVector = q * vectorToRotate;
这些只是基本示例。根据你的应用程序,你可能需要深入研究四元数的操作。Eigen 文档提供了详细的信息和示例:Eigen 四元数文档。




![[CVPR-23] Instant Volumetric Head Avatars](https://img-blog.csdnimg.cn/direct/0bfd9ff1b9f94ec78095eada29a1ed01.png)

