1. 系统设计
此次可编程智能小车系统的设计系统,结合STM32单片机,蓝牙模块,循迹模块,电机驱动模块来共同完成本次设计,实现小车的循迹避障功能和手机遥控功能,其整体框架如图2.1所示。其中,采用STM32单片机来作为核心控制器,负责将各个传感器等模块链接起来;循迹和避障功能,主要由红外检测模块来实现;小车的运动控制,采用直流电机TB6612驱动板配合来完成。

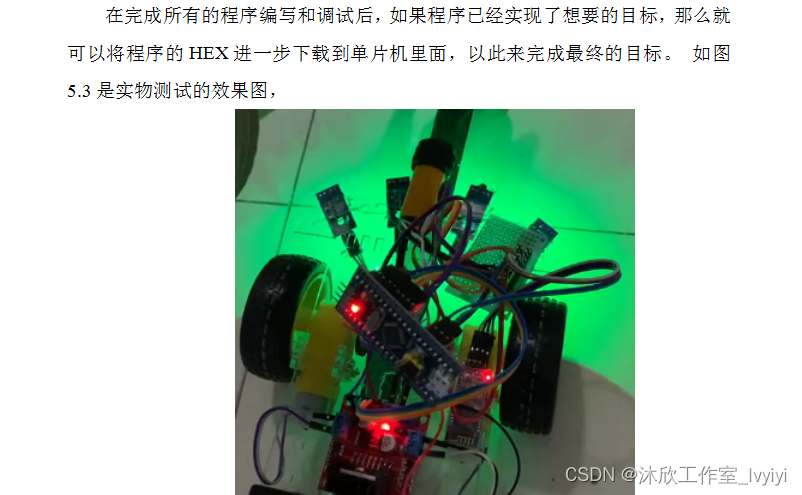
2.实物效果
1. 系统设计
此次可编程智能小车系统的设计系统,结合STM32单片机,蓝牙模块,循迹模块,电机驱动模块来共同完成本次设计,实现小车的循迹避障功能和手机遥控功能,其整体框架如图2.1所示。其中,采用STM32单片机来作为核心控制器,负责将各个传感器等模块链接起来;循迹和避障功能,主要由红外检测模块来实现;小车的运动控制,采用直流电机TB6612驱动板配合来完成。
2.实物效果
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1323394.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!