0. 简介
对于NDT而言,相信各位应该都有所了解了,但是作为高精地图来说性能还需要进一步提升,为此《Towards High-Definition Maps: a Framework Leveraging Semantic Segmentation to Improve NDT Map Compression and Descriptivity》一文提出了一种利用语义分割提高NDT地图压缩和描述能力的框架。由于受到车载存储容量的限制,自动驾驶的鲁棒导航需要高精度(HD)地图,本文提出的环境感知正态分布变换(EA-NDT),其显著改进了标准NDT表示的压缩方式。EA-NDT的压缩表示是基于点云的语义辅助聚类,与标准NDT的栅格单元相比,具有更优的单元。与标准NDT相比,EA-NDT在保持相同描述能力的同时,始终实现了至少1.5倍的地图压缩。此外,我们表明,当使用相同数量的单元时,与标准NDT相比,EA-NDT能够产生具有更高描述能力得分的地图。相关的代码在gitlab中开源了
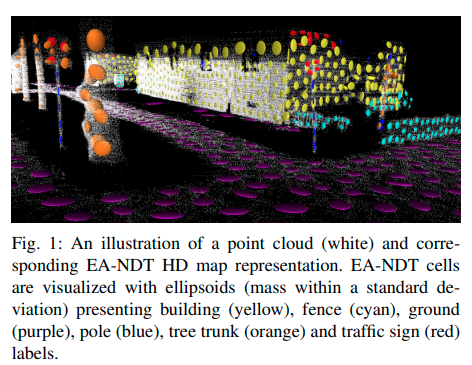
图1:点云(白色)和相应的EA-NDT高清地图表示的示意图。EA-NDT单元用椭球体(标准差内的质量)可视化,显示建筑物(黄色)、围栏(青色)、地面(紫色)、电线杆(蓝色)、树干(橙色)和交通标志(红色)的标签。
1. 主要贡献
本文的主要贡献总结如下:
-
本文提出一种新型的数据驱动框架,用于计算没有栅格结构的NDT地图表示;
-
本文证明了与NDT表示相比,具有显著改进的数据压缩;
-
本工作将所提出的EA-NDT的开源实现分享给研究社区;
-
本文提供在使用Velodyne VLS-128激光雷达采集的数据上评估所提出EA-NDT的配准数据集。
2. 环境感知的NDT
我们提出了一个名为环境感知非破坏性检测(EA-NDT)的框架,将语义分割的点云划分为NDT单元。该框架是一个直接的流程,由4个阶段(图3)组成,逐步将输入的点云划分为单元,最终表示为一个NDT地图。流程的输入是一个注册点云,按照语义分割、实例聚类、基元提取和单元聚类的阶段顺序进行处理。最终,流程的输出是一种基于环境感知的NDT高清地图表示,称为EA-NDT HD地图,它使用NDT表示存储找到的单元。





![20、清华、杭州医学院等提出:DA-TransUNet,超越TranUNet,深度医学图像分割框架的[皇帝的新装]](https://img-blog.csdnimg.cn/direct/79895009754b4df682785a691f4f2fe7.jpeg)