一.概念
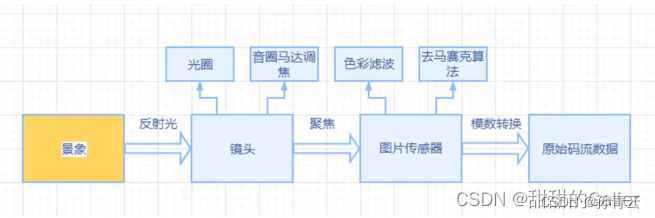
Camera的成像原理
景物通过镜头(LENS)生成的光学图像投射到图像传感器(Sensor)表面上,然后转为模拟的电信号,经过 A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过 IO 接口传输到 CPU 中处理,通过 LCD 就可以看到图像了.
外部光线穿过镜头Lens 后, 经过 Color Filter 滤波后照射到CMOS Sensor 上, CMOS Sensor 将从 Lens 上传导过来的光线转换为电信号,再通过内部的AD模数转换,转换为数字信号。如果 Sensor 没有集成 DSP(数字信号处理),则通过 DVP(数字视频端口) 的方式传输到 基带Baseband上,此时的数据格式是 RAW DATA。如果集成 了 DSP, RAW DATA 数据经过 AWB、 则 Color Matrix、 Lens Shading、 Gamma、 Sharpness、 AE 和 De-noise 处理,后输出 YUV 或 RGB 格式的数据。
最后会由 CPU 送到 framebuffer 中进行显示,这样我们就看到 camera 拍摄到的影像了

第一层“LENS”
CAMERA的成像关键在于SENSOR,为了扩大CCD的采光率必须扩大单一像素的受光面积,在提高采光率的同时会导致画面质量下降。LENS就是相当于在SENSOR前面增加一副眼镜,SENSOR的采光率不是由SENSOR的开口面积决定而是由LENS的表面积决定。
第二层“滤色片”
目前分色滤色片有两种分色方法:
A. RGB原色分色法,就是三原色分色法,几乎所有的人类眼镜可以识别的颜色都可以通过R、G、B来组成,RGB就是通过这三个通道的颜色调节而成。
B. CMKY补色分色法,由四个通道的颜色配合而成,分别是青(C)、洋红(M)、黄(Y)、黑(K),但是调节出来的颜色不如RGB的颜色多。
第三层“感光层(SENSOR)”
图像传感器(SENSOR)是一种半导体芯片,器表面包含有几十万到几百万的光电二极管。光电二极管收到光照射时,就会产生电荷。
目前SENSOR类型有两种:
CCD(Charge Couple Device),电荷耦合器件
CMOS(Complementary Metal Oxide Semiconductor),互补金属氧化物半导体
第四层“A/D转换器”
A/D转换器即ADC(Analog DigitalConverter 模拟数字转换器),将模拟电信号转换为数字电信号。
第五层"数字信号处理芯片DSP"
数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信息参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。
DSP结构框架:
1)ISP(image signal processor)镜像信号处理器
2)JPEG encoder(JPEG图像解码器)
3)USB device controller(USB设备控制器)
二 . 图像格式(image Format/ Color space)
RGB:
YUV
NV21
NV12
Image Sensor类型
a) YUV Sensor
YUV Sensor输出的Data格式为YUV,图像的效果处理使用Sensor内部的ISP,BB端接收YUV格式的data后只进行格式的转换,效果方面不进行处理,由于Sensor内部的ISP处理能力有限,且YUV Sensor的数据量比较大(YUV422的格式1个pixel2个byte),一般Size都比较小,常见的YUV sensor都是5M以下
b) Raw Sensor
Raw Sensor输出的Data格式为Raw,图像的效果处理使用BB端的ISP,BB端接收Raw data后进行一系列的图像处理(OB,Shading,AWB,Gamma,EE,ANR等),效果方面由BB端控制,需要针对不同的模组进行效果调试,Raw sensor是目前的主流,数据量比YUV Sensor小(RAW10 格式的sensor 1个pixel 10个bit)使用平台ISP处理,能支持较大的size


说明:
1) TG(Timing Generate):从sensor获取数据,并送给ISP处理.
2) Platform Data Processor:
包括平台在后端对图像数据进行resize、rotate、flip、format convert等处理.它可以同时有两个buffer输出.
当normal preview时,port1输出给display,port2输出给face detection或者app preview callback
当normal capture时,port1输出大图给jpeg encoder,port2输出小图给回显和thumbnail encode.
当video record时,port1输出给display,port2输出给video encoder.
二.缩写介绍
1. 莱卡
2. 大光圈: 镜头 进光量大 快速对焦 虚化背景
3.广角镜头 焦距 短于 标准镜头 视角大于标准镜头
4 虚化 : 背景虚化,景深变浅
5 景深 : 照片中清晰距离范围
6. 焦距不变 光圈越大 景深越浅
1.长焦
焦距在60mm以上的摄像镜头。其具备类似望远镜的功能,3X及以上的模组都属于这个范围。
FOV
HDR:(高动态范围,High Dynamic Range)
指的是在拍摄的相同画面内,能正常显示画面中最亮和最暗物体的区间范围。动态范围越大,其能正常显示的过亮或者过暗的物体就越多,其显示细节层次也就越丰富,也就是所谓的HDR(High Dynamic Rang)
Camera场景功耗优化
小编曾经搞过一段时间的功耗,也被Camera场景下的功耗优化折磨过一段时间。
降低帧率:在一些特殊场景,对camera的本身要求不是很高时,可以选择降低帧率的方式来降低功耗。
关闭算法:同帧率一样,在一些对camera本身要求不是很高的场景下,可以关闭算法,以降低功耗。
降低MIPI速率。
人脸检测周期调整。
1.不可访问
https://source.android.com
https://developer.android.com
2.可以访问
https://source.android.google.cn
https://developer.android.google.cn

![[NCTF2019]Fake XML cookbook1](https://img-blog.csdnimg.cn/direct/9863ccf9055f4931916a7a6d4a71f9a6.png)