目录
一、最小生成树
二、普里姆算法的构造过程
三、普里姆算法的实现
一、最小生成树
假设要在 n 个城市之间建立通信联络网,则连通 n 个城市只需要 n - 1 条线路。这时,自然会考虑这样一个问题,如何在最节省经费的前提下建立这个通信网。
在每两个城市之间都可设置一条线路,相应地都要付出一定的经济代价。n 个城市之间,最多可能设置 条线路,那么如何在这些可能的线路中选择 n - 1 条,以使总的耗费最少呢?
可以用连通网来表示 n 个城市,以及 n 个城市间可能设置的通信路线,其中网的顶点表示城市,边表示两城市之间的线路,赋予边的权值表示相应的代价。对于 n 个顶点的连通网可以建立许多不同的生成树,每一颗生成树都可以是一个通信网,最合理的通信网应该是各边代价之和最小的那颗生成树,称为连通网的最小代价生成树(Minimum Cost Spanning Tree),简称最小生成树。
构造最小生成树有多种算法,其中多数算法利用了最小生成树的下列一种简称为 MST 的性质:
假设 N = (V, E) 是一个连通网,U 是顶点集 V 的一个非空真子集。若 (u, v) 是 N 中所有的一个顶点在 U()中,另一个顶点在 V - U(
)中的边里,具有最小权值的一条边,则必存在一棵包含边 (u, v) 的最小生成树。
可以用反证法来证明:
假设网 N 的任何一棵最小生成树都不包含边 (u, v),T 是连通网上的一棵最小生成树,由生成树的定义可知,T 中必存在一条从 u 到 v 的路径 P,且在 P 上必存在一条边 (u', v'),其中 。
当将边 (u, v) 加入到 T 中时,(u, v) 和 P 构成了一条回路,删去 (u', v') 便可消除回路,同时得到另一颗生成树 T‘。因为 (u, v) 的权值不高于 (u', v'),所以 T' 的权值亦不高于 T,那么 T’ 是包含 (u, v) 的一棵最小生成树,和假设矛盾。
普里姆(Prim)算法和克鲁斯卡尔(Kruskal)算法是两个利用 MST 性质构造最小生成树的算法。
二、普里姆算法的构造过程
假设 N = (V, E) 是连通网,TE 是 N 上最小生成树中边的集合。
-
。
-
在所有
的边
中找一条权值最小的边
并入集合 TE,同时
并入 U。
-
重复 2,直至 U = V 为止。
此时 TE 中必有 n - 1 条边,则 T = (V, TE) 为 N 的最小生成树。
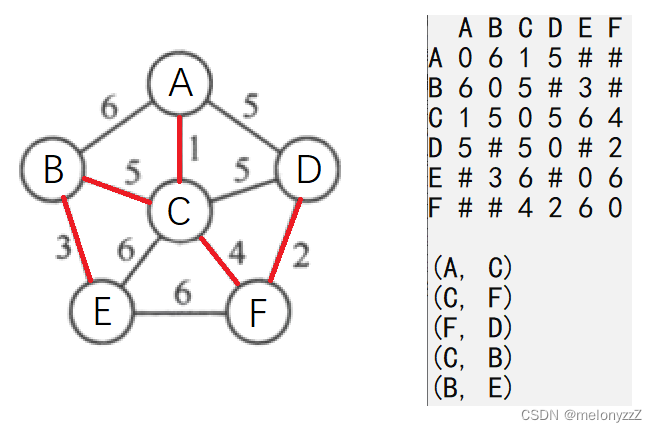
下图所示为一个连通网 G5 从 v1 开始构造最小生成树的例子。可以看出,普里姆算法逐步增加 U 中的顶点,可称为 "加点法"。

每次选择最小边时,可能存在多条同样权值的边可选,此时任选其一即可。
三、普里姆算法的实现
假设无向网 N 以邻接矩阵形式存储,从顶点 u 出发构造 N 的最小生成树 T,要求输出 T 的各条边。
为实现这个算法附设了两个辅助数组 lowcostArr 和 adjVexPosArr。对每个顶点 ,lowcostArr[i - 1] = Min{ cost },即表示 N 中所有的一个顶点在 U 中,另一个顶点是 vi 的边里,最小边上的权值;adjVexPosArr[i - 1] 则表示那条最小边在 U 中的那个顶点在图中的位置。
AMGraph.h:
#pragma once
// 无向网
typedef char VertexType;
typedef int EdgeType;
#define DEFAULT_CAPACITY 2
typedef struct AMGraph
{
VertexType* vertices;
EdgeType** edges;
int vSize;
int eSize;
int capacity;
}AMGraph;
// 基本操作
void AMGraphInit(AMGraph* pg);
void ShowAdjMatrix(AMGraph* pg);
int GetVertexPos(AMGraph* pg, VertexType v);
void InsertVertex(AMGraph* pg, VertexType v);
void InsertEdge(AMGraph* pg, VertexType v1, VertexType v2, EdgeType cost);
// 普里姆算法
void MiniSpanTree_Prim(AMGraph* pg, VertexType u);AMGraph.c:
#include "AMGraph.h"
#include <assert.h>
#include <stdlib.h>
#include <stdio.h>
void AMGraphInit(AMGraph* pg)
{
assert(pg);
pg->vSize = pg->eSize = 0;
pg->capacity = DEFAULT_CAPACITY;
pg->vertices = (VertexType*)malloc(sizeof(VertexType) * pg->capacity);
assert(pg->vertices);
pg->edges = (EdgeType**)malloc(sizeof(EdgeType*) * pg->capacity);
assert(pg->edges);
for (int i = 0; i < pg->capacity; ++i)
{
pg->edges[i] = (EdgeType*)malloc(sizeof(EdgeType) * pg->capacity);
assert(pg->edges[i]);
for (int j = 0; j < pg->capacity; ++j)
{
if (i == j)
pg->edges[i][j] = 0;
else
pg->edges[i][j] = INT_MAX;
}
}
}
void ShowAdjMatrix(AMGraph* pg)
{
assert(pg);
printf(" ");
for (int i = 0; i < pg->vSize; ++i)
{
printf("%c ", pg->vertices[i]);
}
printf("\n");
for (int i = 0; i < pg->vSize; ++i)
{
printf("%c ", pg->vertices[i]);
for (int j = 0; j < pg->vSize; ++j)
{
if (pg->edges[i][j] == INT_MAX)
printf("# "); // 用 # 代替 ∞
else
printf("%d ", pg->edges[i][j]);
}
printf("\n");
}
}
int GetVertexPos(AMGraph* pg, VertexType v)
{
assert(pg);
for (int i = 0; i < pg->vSize; ++i)
{
if (pg->vertices[i] == v)
return i;
}
return -1;
}
void InsertVertex(AMGraph* pg, VertexType v)
{
assert(pg);
// 考虑是否需要扩容
if (pg->vSize == pg->capacity)
{
VertexType* tmp1 = (VertexType*)realloc(pg->vertices, sizeof(VertexType) * 2 * pg->capacity);
assert(tmp1);
pg->vertices = tmp1;
EdgeType** tmp2 = (EdgeType**)realloc(pg->edges, sizeof(EdgeType*) * 2 * pg->capacity);
assert(tmp2);
pg->edges = tmp2;
for (int i = 0; i < pg->capacity; ++i)
{
EdgeType* tmp3 = (EdgeType*)realloc(pg->edges[i], sizeof(EdgeType) * 2 * pg->capacity);
assert(tmp3);
pg->edges[i] = tmp3;
for (int j = pg->capacity; j < 2 * pg->capacity; ++j)
{
pg->edges[i][j] = INT_MAX;
}
}
for (int i = pg->capacity; i < 2 * pg->capacity; ++i)
{
pg->edges[i] = (EdgeType*)malloc(sizeof(EdgeType) * 2 * pg->capacity);
assert(pg->edges[i]);
for (int j = 0; j < 2 * pg->capacity; ++j)
{
if (i == j)
pg->edges[i][j] = 0;
else
pg->edges[i][j] = INT_MAX;
}
}
pg->capacity *= 2;
}
// 插入顶点
pg->vertices[pg->vSize++] = v;
}
void InsertEdge(AMGraph* pg, VertexType v1, VertexType v2, EdgeType cost)
{
assert(pg);
int pos1 = GetVertexPos(pg, v1);
int pos2 = GetVertexPos(pg, v2);
if (pos1 == -1 || pos2 == -1)
return;
if (pg->edges[pos1][pos2] != INT_MAX)
return;
pg->edges[pos1][pos2] = pg->edges[pos2][pos1] = cost;
++pg->eSize;
}
// 普里姆算法的实现
void MiniSpanTree_Prim(AMGraph* pg, VertexType u)
{
assert(pg);
EdgeType* lowcostArr = (EdgeType*)malloc(sizeof(EdgeType) * pg->vSize);
int* adjVexPosArr = (int*)malloc(sizeof(int) * pg->vSize);
assert(lowcostArr && adjVexPosArr);
int pos = GetVertexPos(pg, u);
if (pos == -1)
return;
for (int i = 0; i < pg->vSize; ++i)
{
if (i != pos)
{
lowcostArr[i] = pg->edges[pos][i];
adjVexPosArr[i] = pos;
}
else
{
lowcostArr[i] = 0; // 初始,U = {u}
}
}
// 选择其余 pg->vSize - 1 个顶点,生成 pg->vSize - 1 条边
for (int i = 0; i < pg->vSize - 1; ++i)
{
EdgeType min = INT_MAX;
int minIndex = -1;
for (int j = 0; j < pg->vSize; ++j)
{
if (lowcostArr[j] != 0 && lowcostArr[j] < min)
{
min = lowcostArr[j];
minIndex = j;
}
}
printf("(%c, %c)\n", pg->vertices[adjVexPosArr[minIndex]], pg->vertices[minIndex]);
lowcostArr[minIndex] = 0; // 将顶点并入 U
for (int j = 0; j < pg->vSize; ++j)
{
if (pg->edges[minIndex][j] < lowcostArr[j])
{
lowcostArr[j] = pg->edges[minIndex][j];
adjVexPosArr[j] = minIndex;
}
}
}
free(lowcostArr);
free(adjVexPosArr);
}Test.c:
#include "AMGraph.h"
#include <stdio.h>
int main()
{
AMGraph g;
AMGraphInit(&g);
InsertVertex(&g, 'A');
InsertVertex(&g, 'B');
InsertVertex(&g, 'C');
InsertVertex(&g, 'D');
InsertVertex(&g, 'E');
InsertVertex(&g, 'F');
InsertEdge(&g, 'A', 'B', 6);
InsertEdge(&g, 'A', 'C', 1);
InsertEdge(&g, 'A', 'D', 5);
InsertEdge(&g, 'B', 'C', 5);
InsertEdge(&g, 'B', 'E', 3);
InsertEdge(&g, 'C', 'D', 5);
InsertEdge(&g, 'C', 'E', 6);
InsertEdge(&g, 'C', 'F', 4);
InsertEdge(&g, 'D', 'F', 2);
InsertEdge(&g, 'E', 'F', 6);
ShowAdjMatrix(&g);
printf("\n");
MiniSpanTree_Prim(&g, 'A');
return 0;
}