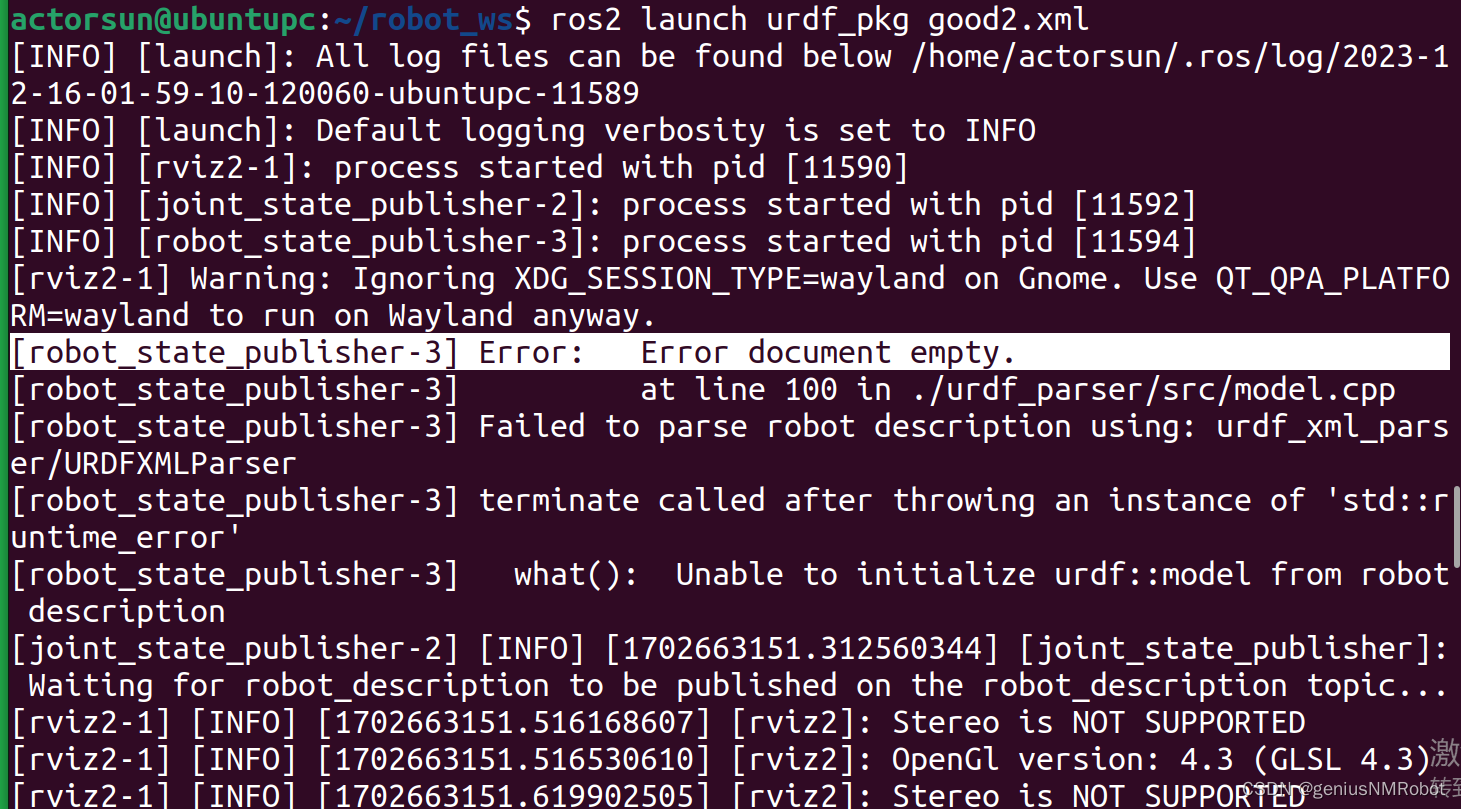
出现这个问题,我这里遇到的是:指定的urdf文件路径无效,而产生这个的根本原因是没有在CMakelists.txt中添加如下代码:
install(
DIRECTORY urdf
DESTINATION share/${PROJECT_NAME}
)把urdf文件夹添加到指定的share/${PROJECT_NAME}目录
提示:尽量使用xacro文件方式,因为稳定,使用urdf文件会出现不知道什么原因的故障。
建议使用solid works生成urdf文件,然后把urdf文件转换为xacro文件,然后再使用,这样不易出错。具体原因不知道

其实把urdf文件修改为xacro文件最简单的办法之需要花费10秒,哈哈哈简直不要太容易。
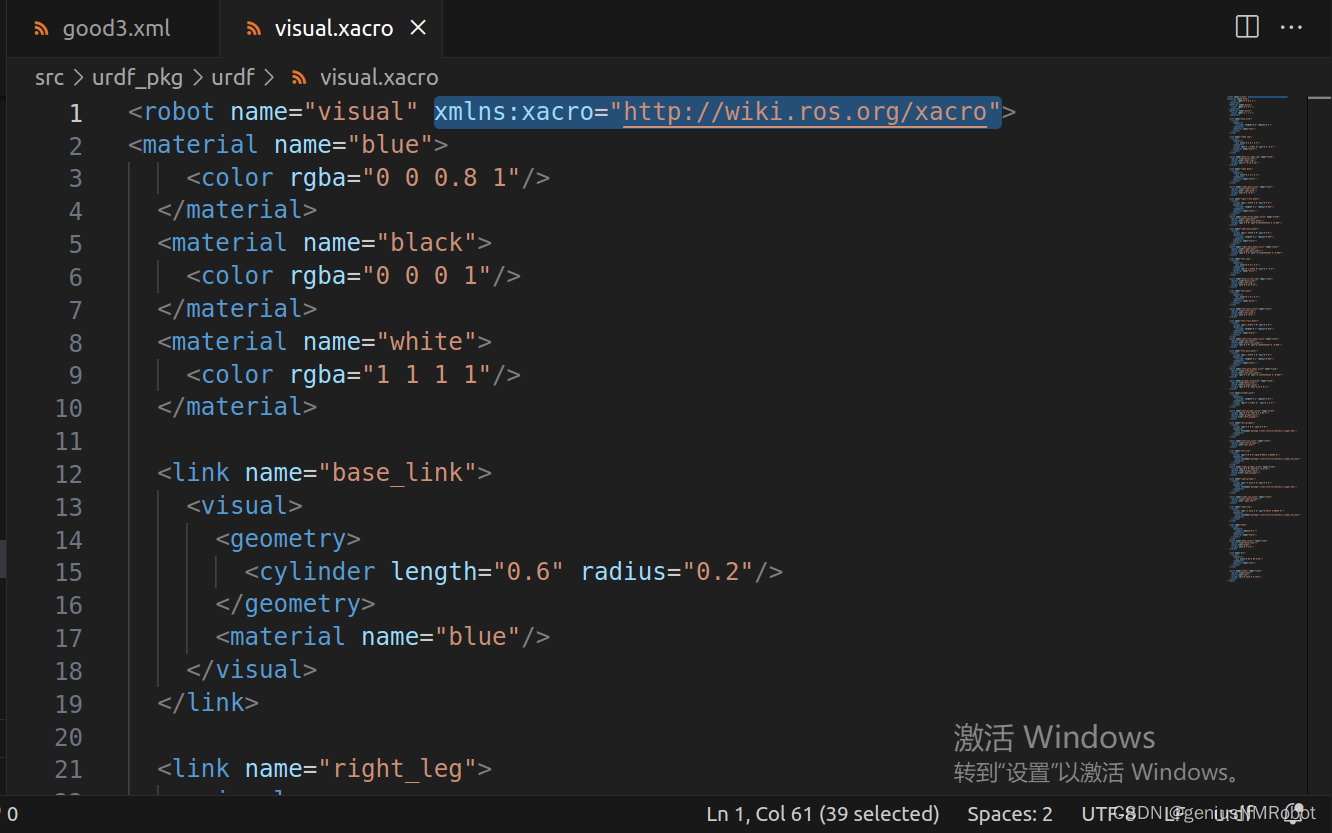
第一步:把urdf后缀名改为xacro,第二:在urdf文件里面的<robot>标签内添加:
xmlns:xacro="http://wiki.ros.org/xacro"就可以了例如
就是这么简单哈哈哈。这里需要说明的是。本来xacro是用来提高建立机器人模型的效率的,但是这是因为没有考虑solid works,现在因为solid works建立urdf文件更加方便效率更高,所以xacro文件暂时就不用了。当然了肯定是要用盗版的才更方便