b站上有一个非常好的ros教程234仿真之URDF_link标签简介-机器人系统仿真_哔哩哔哩_bilibili,推荐去看原视频。
视频教程的相关文档见:6.7.1 机器人运动控制以及里程计信息显示 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
本文对视频教程第六章的主要内容做一个总结,视频教程没有集成的代码,都是每一课分散的代码,本文把主要代码集合进来,给嫌视频太长不想看的同学做一个总结。教程视频中使用的是rplidar,那个很不好用,也不接近现实。本文改用Velodyne的lidar,相对更好用一些。Velodyne源代码在github。
本文主要包括以下内容:
gazebo仿真世界的构建,mobile robot的构建,RGB相机和雷达这两个传感器的构建,如何获取传感器的数据并在rviz中显示,以及robot的控制器。
下载资源,可以得到如下的
文件结构
工作空间文件夹:ros_robot_navi,工作空间文件夹下:
src中包含两个功能包:

velodyne_descreption是github上下载的lidar仿真模块。
进入 robot_sim中,有如下结构

urdf中放的是robot lidar camera等模型文件,worlds中放的是gazebo模拟世界的环境,launch中就是launch文件了。
robot建模
在urdf/gazebo/中,放的是各类模型。

以my_base.xacro文件为例,这个是robot的底座
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${base_footprint_radius}" />
</geometry>
</visual>
</link>link标签就是机器人的各个部件,各个部件之间,通过joint标签相连接
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 ${earth_space + base_link_length / 2 }" />
</joint>collision和initial属性是gazebo仿真必须的属性。进行刚体力学 运动学计算和碰撞计算。
my_car.xacro将各个部分拼装在一起。move是小车运动控制器。
<!-- 组合小车底盘与摄像头 -->
<robot name="my_car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_head.xacro" />
<xacro:include filename="my_base.xacro" />
<xacro:include filename="my_camera.xacro" />
<xacro:include filename="my_laser.xacro" />
<xacro:include filename="move.xacro" />
<xacro:include filename="$(find velodyne_description)/urdf/VLP-16.urdf.xacro"/>
<xacro:VLP-16 parent="support" name="velodyne" topic="/velodyne_points" hz="10" samples="440" gpu="false">
<origin xyz="0 0 0.4" rpy="0 0 0" />
</xacro:VLP-16>
</robot>
在集成lidar时,parent是提前建好的joint中的父节点。通过parent这个参数,就可以建立lidar模块和小车底座模块的联系。
launch
在robot_sim功能包的launch文件夹中,car_env_gazebo.launch
<launch>
<!--launch urdf content to param server-->
<param name="robot_description" command="$(find xacro)/xacro $(find robot_sim)/urdf/gazebo/my_car.xacro" />
<!-- launch gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find robot_sim)/worlds/box_house.world" />
</include>
<!-- display robot in gazebo-->
<node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>command命令是为了将.xacro转为.urdf。也可以通过以下命令单独进行转化:
进入要转化的.xacro文件夹
rosrun xacro xacro xxx.xacro > xxx.urdf把转化集成进.launch中的好处是改了模型以后不用单独转化,直接运行。坏处是,如果模型有问题,不知道哪里报错。如果在gazebo中没有正确显示出模型,那么再单独运行这个转化命令,看看是模型哪里写错了。
运行这个.launch文件
roslaunch robot_sim car_env_gazebo.launch就可以在gazebo中看到小车和雷达了

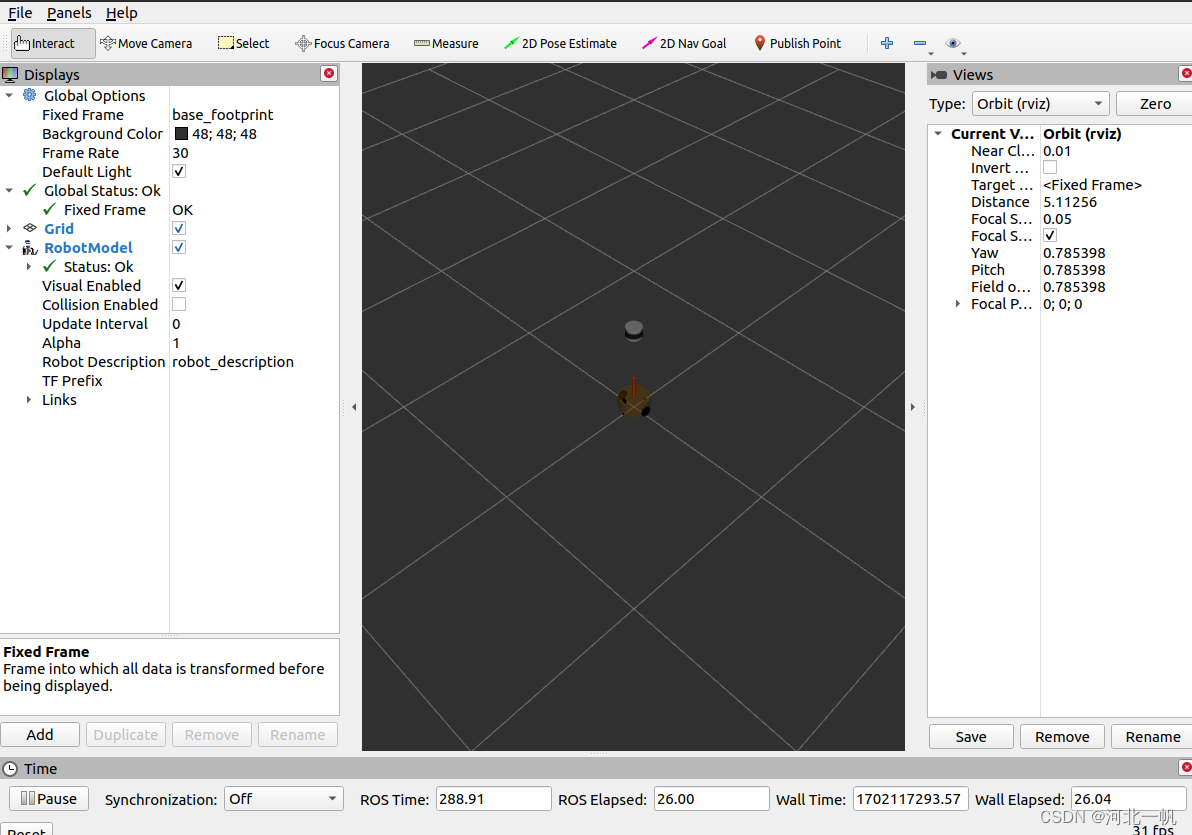
再运行 my_car_rviz.launch
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find robot_sim)/urdf/gazebo/my_car.xacro" />
<node pkg="rviz" type="rviz" name="rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>
就可以在rviz中看到lidar的点云和相机的图片了


小车也可以加进来
运动控制
再打开一个终端,source一下,运行
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
控制小车运动。