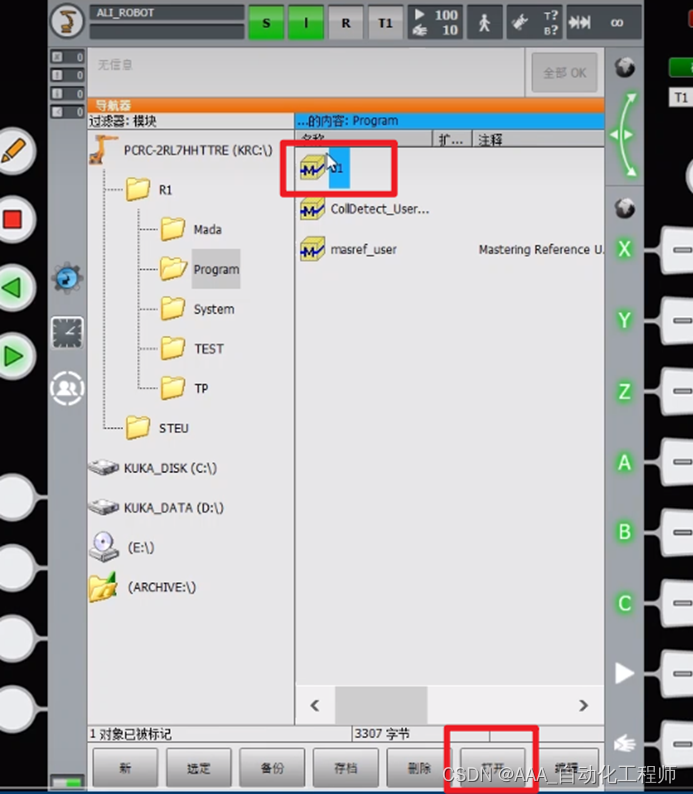
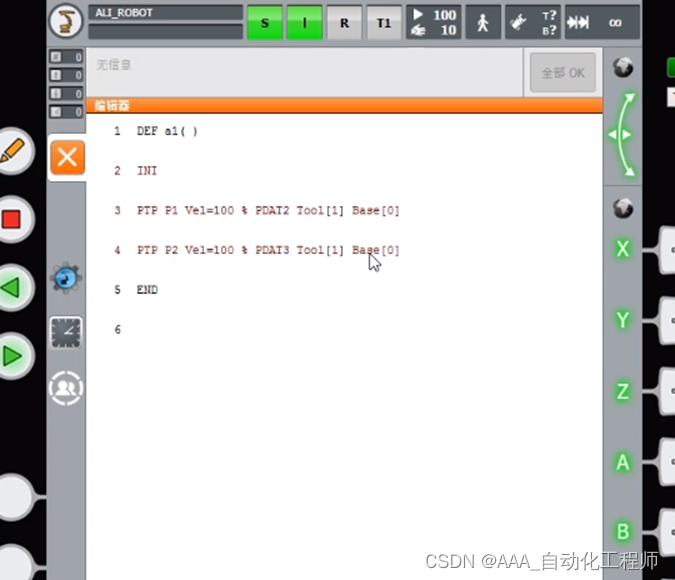
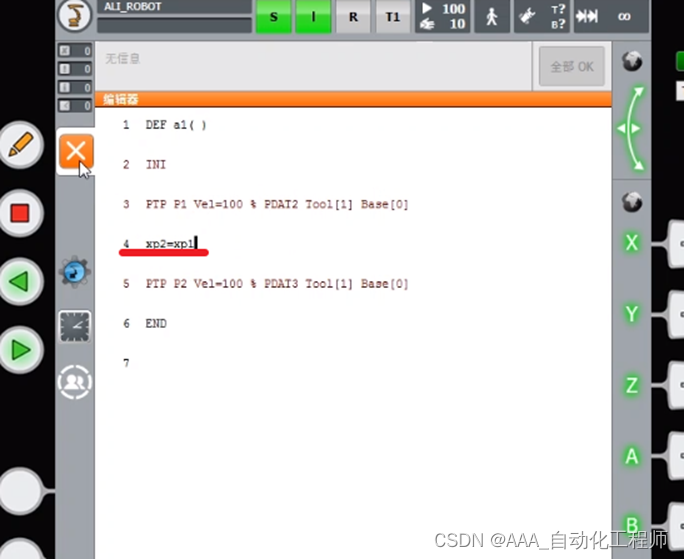
KUKA机器人坐标点如何赋值?
news2026/2/12 21:26:19

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1293862.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
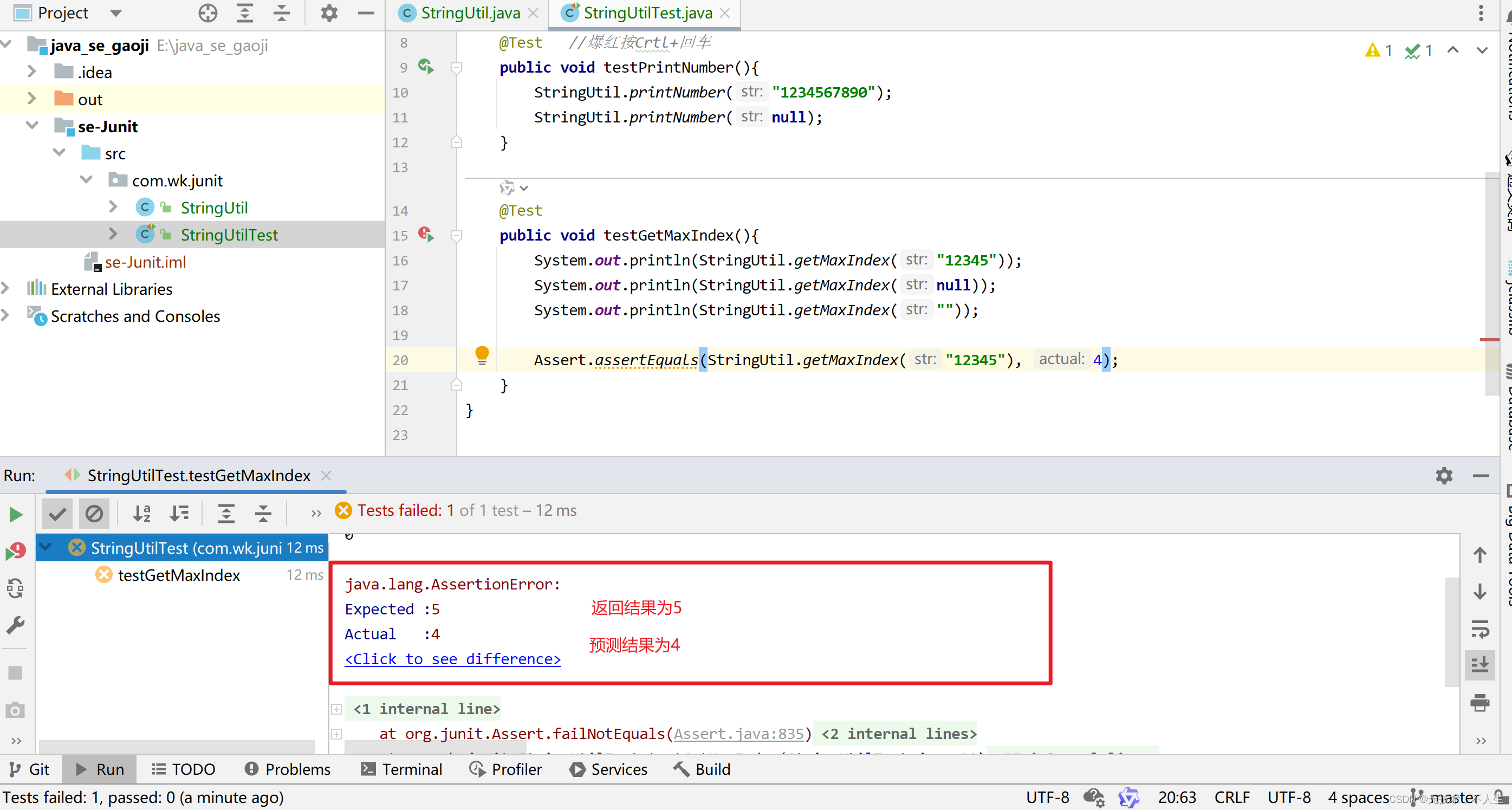
一文详解Java单元测试Junit
文章目录 概述、Junit框架快速入门单元测试概述main方法测试的问题junit单元测试框架优点:使用步骤: 使用案例包结构 Junit框架的常见注解测试 概述、Junit框架快速入门
单元测试概述
就是针对最小的功能单元(方法),…

1146-table performance-schema.session_variables don‘t exits打卡navicat连接MySQL报错
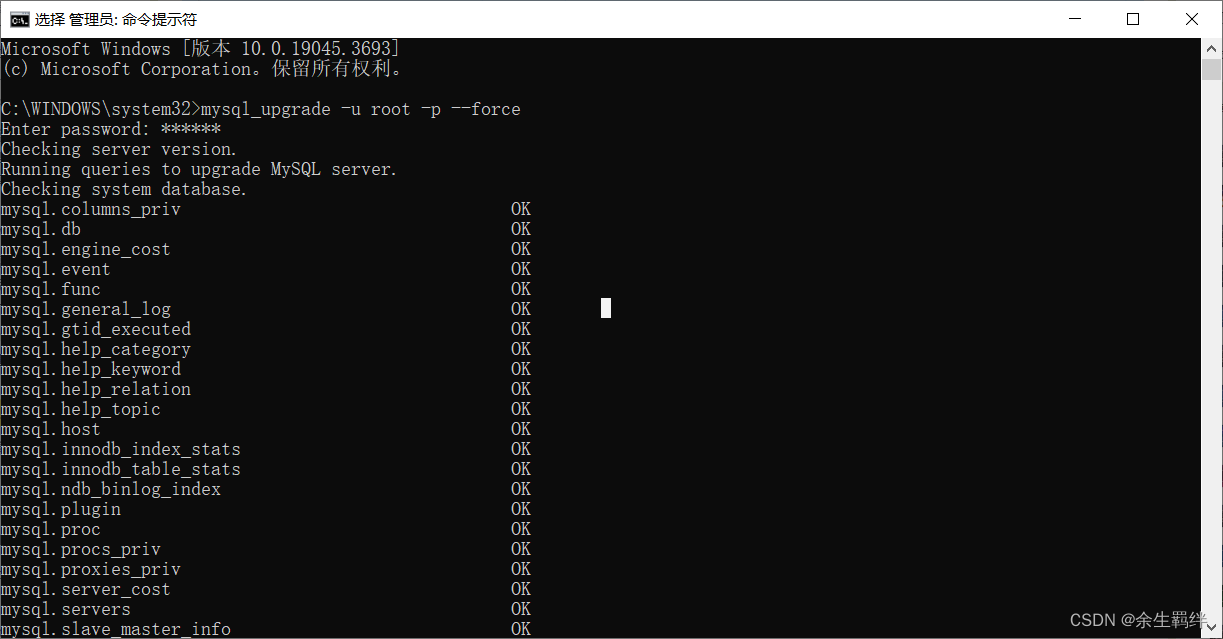
navicat连接MySQL时报错:
管理员权限打开cmd 输入下面代码:
mysql_upgrade -u root -p --force输入密码 然后就可以正常连接了。 mysql_upgrade检查所有数据库中与mysql服务器当前版本不兼容的所有表。 mysql_upgrade也会升级系统表,以便你…
用23种设计模式打造一个cocos creator的游戏框架----(一)生成器模式
1、模式标准
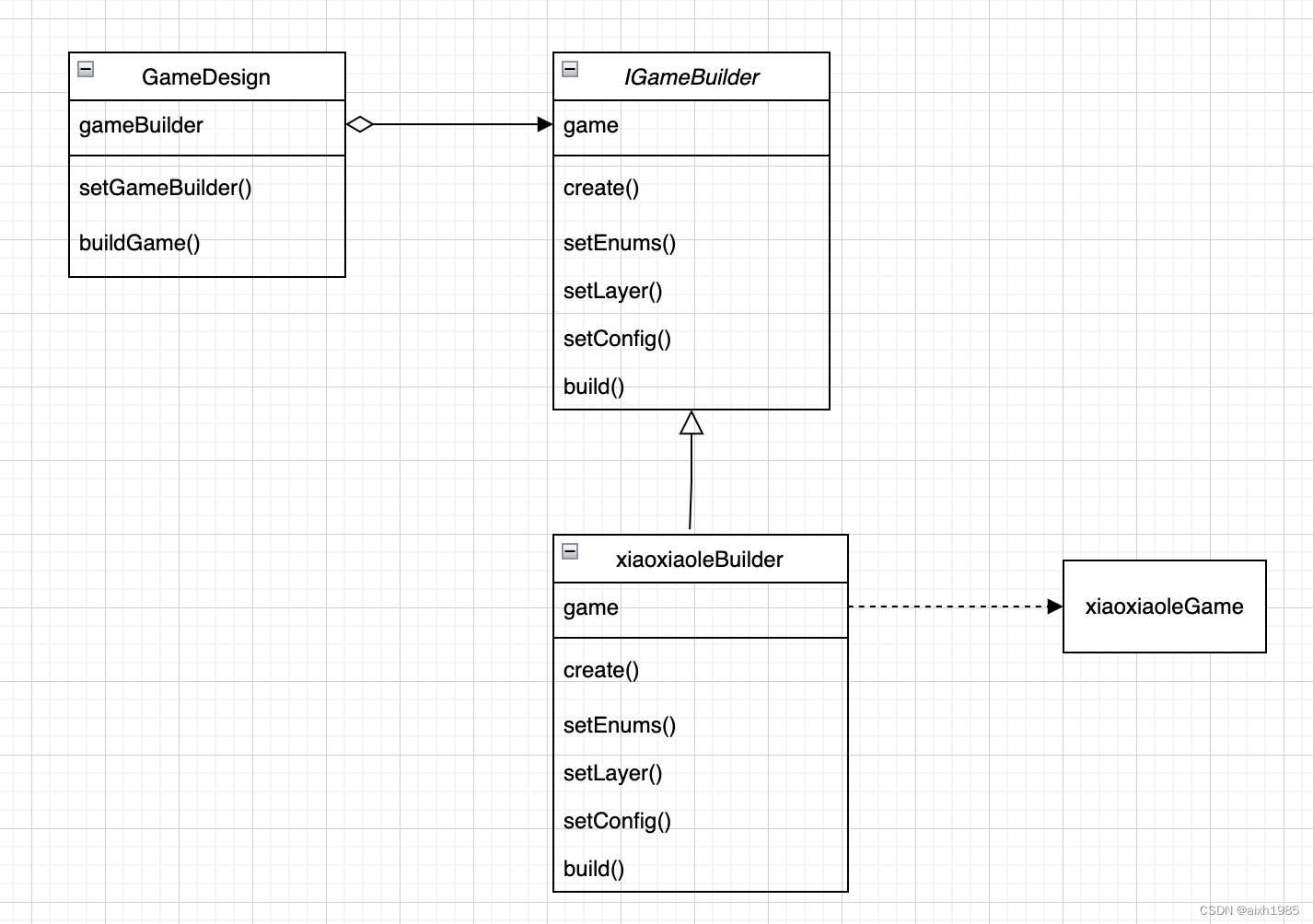
模式名称:生成器模式
模式分类:创建型
模式意图:将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示。
结构图: 适用于:
当创建复杂对象的算法应该独立于该对象的…

原生cesium、mars3d、supermap-cesium在vue3+vite中引入
1. 原生cesium
需要下载
yarn add cesiumyarn add vite-plugin-cesium2. mars3d
需要下载
yarn add mars3d mars3d-cesiumyarn add vite-plugin-mars3d3. supermap-cesium
只需要引入官网下载的包,build文件夹下的cesium,以及项目中引入的其他cesiu…
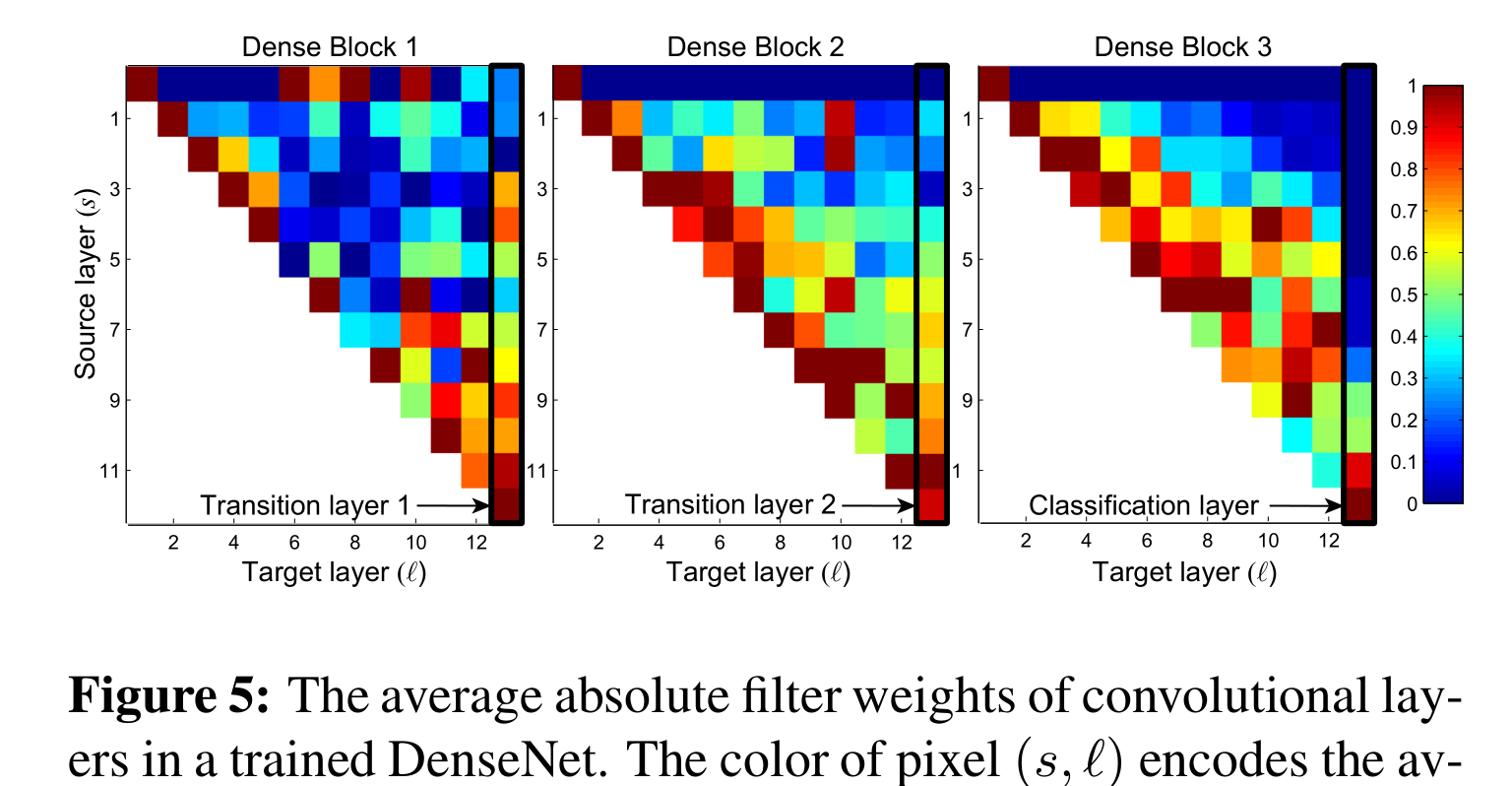
Densely Connected Convolutional Networks(2018.1)
文章目录 Abstract1. Introduction提出问题以前的解决方法我们的方法效果 2. Related Work3. DenseNetsResNets.Dense connectivity.Composite function.Pooling layers.Growth rate.Bottleneck layers.Compression.Implementation Details. 4. Experiments5. DiscussionModel …

C语言之动态内存管理(malloc calloc realloc)
C语言之动态内存管理 文章目录 C语言之动态内存管理1. 为什么要有动态内存管理2. malloc 和 free2.1 malloc2.2 free2.3 例子 3. calloc 和 realloc3.1 calloc3.2 realloc 4. 常见的动态内存错误4.1 对NULL指针的解引⽤操作4.2 对动态开辟空间的越界访问4.3 对⾮动态开辟内存使…
【ARM Trace32(劳特巴赫) 使用介绍 13 -- Trace32 变量篇】
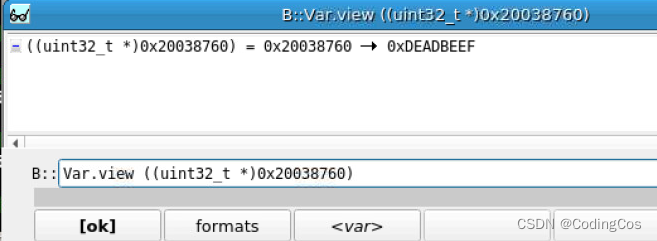
文章目录 Trace32 查看变量值Var.view 查看变量值Var.view 查看数据类型的大小Var.view 根据变量地址查看变量值 Trace32 查看变量值
步骤1 步骤2 步骤3: 步骤4:
查看结构体变量 str_t32 的值
struct t32_str {uint32_t t32_val;uint32_t …

苹果手机ios系统安装了一个免签应用书签webclip描述文件该如何卸载?
随着移动应用的普及,越来越多的用户开始关注到苹果免签的应用。相比于需要通过 App Store 审核和签名的应用,免签应用无需经过苹果的审核过程,可以直接安装和使用。那么,苹果免签应用是如何制作的呢?本文将介绍制作苹果…

震坤行2023安全月活动顺利收官
震坤行2023安全月活动顺利收官 2023年6月,是第22个全国“安全生产月”,主题为 “人人讲安全、个个会应急”。震坤行工业超市(上海)有限公司基于国家 “安全生产月”的主题要求,以及公司具体的安全形势,于6月1日在全公司范围内正式…
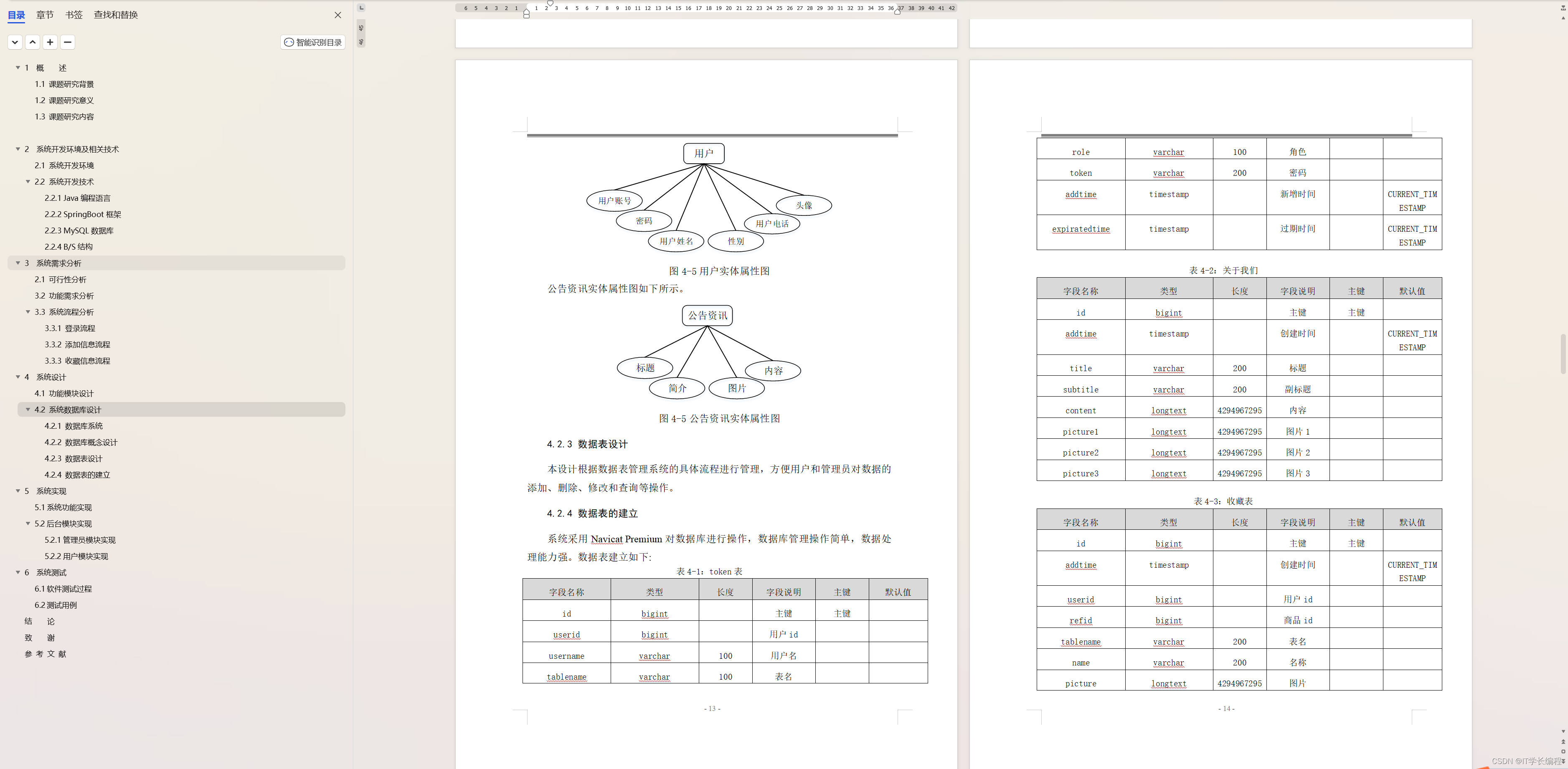
计算机毕业设计 基于大数据的智能家居销量数据分析系统的设计与实现 Java实战项目 附源码+文档+视频讲解
博主介绍:✌从事软件开发10年之余,专注于Java技术领域、Python人工智能及数据挖掘、小程序项目开发和Android项目开发等。CSDN、掘金、华为云、InfoQ、阿里云等平台优质作者✌ 🍅文末获取源码联系🍅 👇🏻 精…
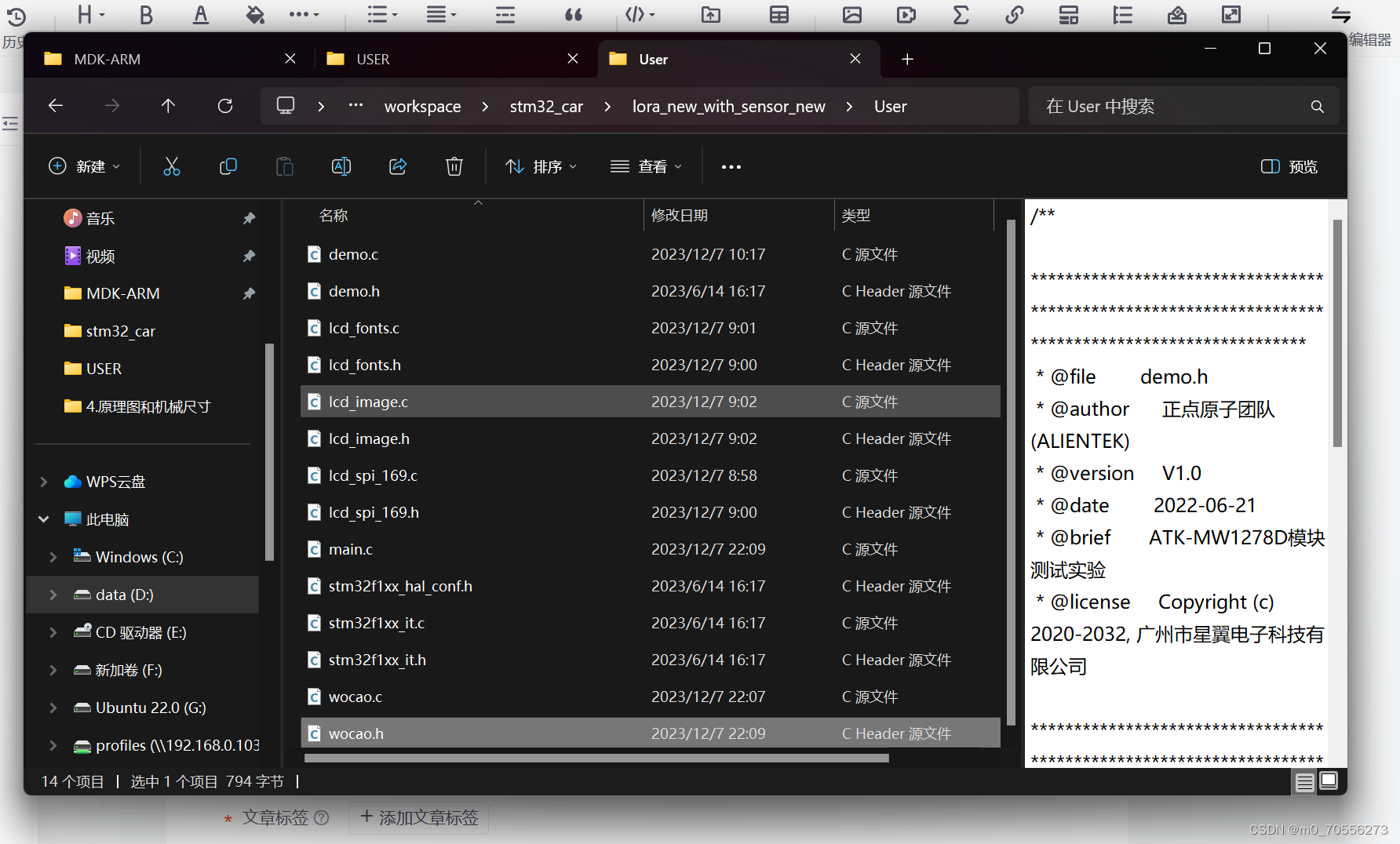
keil添加了头文件仍然报找不到头文件的原因
如图,我在user分组新建Item,可是keil提示头文件不存在,所有的一切设置都是对的,但就是找不到头文件,找了很久,最后才发现是user分组和文件系统中的文件夹不一致的原因。 如图,在分组的文件系统的…
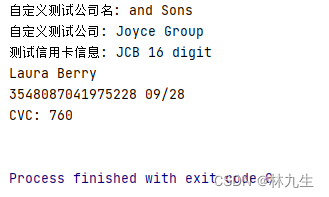
【Python】Faker库详解:创建测试数据轻而易举
Python Faker库详解:创建测试数据轻而易举
在软件开发和测试过程中,通常需要大量的测试数据来模拟真实环境。Python的Faker库为开发者提供了一个方便、灵活且强大的工具,用于生成各种虚构数据。本文将深入介绍Faker库,演示其基本…

GateWay网关介绍以及整合knife4j聚合所有服务的接口文档
为什么使用网关?
因为多个微服务的端口不同,前端调用不方便,使用网关可以统一接收处理前端的请求,同时方便接口的集中处理,比如鉴权、聚合接口文档、限流等等..
这里使用Knife4j文档工具来实现接口文档:K…
Linux系统调试课:USB 常用调试方法
文章目录 一、USB调试工具有哪些二、USB相关节点2.1、USB枚举成功标志2.2、USB speed查询2.3、USB 查询PID、VID沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇章主要 介绍 USB 常用调试方法。
一、USB调试工具有哪些

LeetCode:1466. 重新规划路线(DFS C++、Java)
目录 1466. 重新规划路线
题目描述:
实现代码与解析:
DFS
原理思路: 1466. 重新规划路线
题目描述: n 座城市,从 0 到 n-1 编号,其间共有 n-1 条路线。因此,要想在两座不同城市之间旅行只有…

【带头学C++】----- 九、类和对象 ---- 9.8 动态对象创建
目录
9.8 动态对象创建
9.8.1 动态创建对象基础概念
9.8.2 C语言创建动态对象的
9.8.3 new创建动态对象
9.8.4 delete释放动态对象
9.8.5 动态对象数组 9.8 动态对象创建
9.8.1 动态创建对象基础概念 在创建数组时,我们通常需要预先指定数组的长度࿰…

二分查找|差分数组|LeetCode2251:花期内花的数目
作者推荐
贪心算法LeetCode2071:你可以安排的最多任务数目
本文涉及的基础知识点
二分查找算法合集
题目
给你一个下标从 0 开始的二维整数数组 flowers ,其中 flowers[i] [starti, endi] 表示第 i 朵花的 花期 从 starti 到 endi (都 包含&#x…

低代码与MES:智能制造的新篇章
一、引言
随着工业4.0和智能制造的兴起,企业对于生产过程的数字化、智能化需求日益迫切。制造执行系统(MES)作为连接计划层与控制层的关键信息系统,在提升生产效率、优化资源配置、保障产品质量等方面发挥着重要作用。然而&#…

Linux Docker 安装Nginx
1.21、查看可用的Nginx版本
访问Nginx镜像库地址:https://hub.docker.com/_/nginx
2、拉取指定版本的Nginx镜像 docker pull nginx:latest #安装最新版 docker pull nginx:1.25.3 #安装指定版本的Nginx 3、查看本地镜像 docker images 4、根据镜像创建并运行…