差分基准站,又称参考接收机,是一种固定式卫星接收机,用于提高卫星定位精度。 差分基准站的作用是提供已知位置和准确的位置信号,以纠正其他移动定位终端接收器接收到的卫星信号中的误差。 卫星定位信号会受到多种因素的影响,例如大气条件、电离层干扰和卫星轨道误差。 这些因素会导致卫星定位出现误差,从而影响卫星定位的准确性。
差分基准站通常放置在已知位置,通过将基准站接收到的卫星信号与基于其已知位置的预期卫星信号进行比较,参考站可以确定卫星信号中的错误。 然后这些错误信息传输给到该地区的其他卫星接收设备,这些接收器可以使用这些信息来校正自己的卫星信号并提高定位精度。
差分基准站的使用在需要高精度定位的应用中尤为重要,例如测量、测绘和导航。 通过提供准确可靠的校正信息,差分参考站可以提高卫星 接收器的定位精度到厘米,从而实现更精确可靠的定位。
应用领域
差分基准站HXZK-CFJZ可为便携式RTK终端提供高精度的差分服务,产品采用IP67防护等级设计,支持BDS:B1、B2、B3,GPS:L1C/A、L2C、L2E、L5,GLONASS:L1 C/A、L1P、L2 C/A(仅GLONASS M)、L2P,GIOVE-A:同步L1 BOC、E5A、E5B和E5AltBOC(支持),GIOVE-B:同步L1 CBOC、E5A、E5B和E5AltBOC (支持)。SBAS:L1 C/A, L5支持WASS, EGNOS 和MSAS,差分基站支持365天*24h连续工作,工业级标准设计,支持恶劣环境使用。

特点
- 全方位全星座跟踪技术
能够接收中国的北斗定位系统BDS:B1、B2、B3,美国的GPS:L1C/A、L2C、L2E、L5,俄罗斯的GLONASS:L1 C/A、L1P、L2 C/A(仅GLONASS M)、L2P,GIOVE-A:同步L1 BOC、E5A、E5B和E5AltBOC(支持),GIOVE-B:同步L1 CBOC、E5A、E5B和E5AltBOC (支持)。SBAS:L1 C/A, L5支持WASS, EGNOS 和MSAS。

- 工业级设计
产品采用工业级标准设计,支持24小时*365天连续使用,工作温度-40℃~+80℃,定位稳定可靠。

- 覆盖范围广
一台差分基准站可覆盖方圆20km距离,为该区域设备提供差分服务。
- 丰富的通信协议
设置支持TCP/UDP/HTTP协议也可以选配4G传输。
- 宽电压供电
支持DC12-24V宽电压供电模式。
- 安装简单
设备安装简单,没有复杂的安装流程。
差分系统架构
差分定位系统架构如下图所示,差分接收机通过馈线和差分天线连接,天线需要固定安装在露天的室外,必要时候需要建设固定安装基座,差分接收机通过4G或者网线的方式将数据传输到服务器,服务器需要有固定的IP地址。
差分基站安装
安装北斗差分基准站是确保高精度定位服务有效运行的关键步骤。以下是在安装差分基准站时需要注意的一些要求和注意事项:
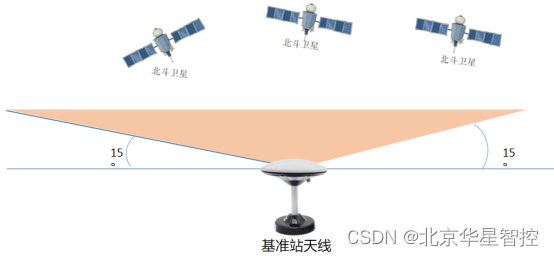
- 选址和环境:
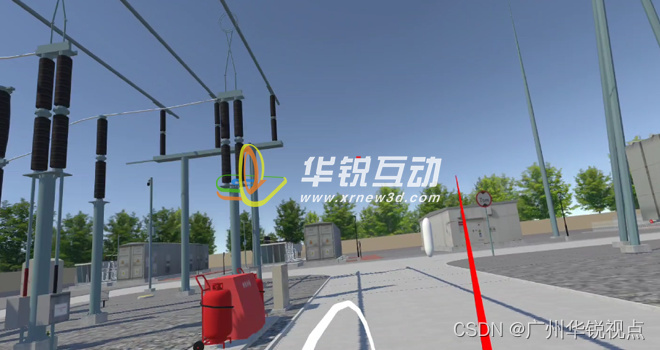
开阔地带: 差分基准站应尽量选择在视线开阔的地带,避免高建筑物、山脉、树木等阻挡卫星信号;如下图所示天线和天空15度方向要没有建筑物或者遮挡物,如下图黄色区域不能有遮挡物或者建筑物。
低干扰环境: 选择远离电磁干扰源(如高压电线、通讯设施等)的地点,以确保设备正常运行。
防护措施: 如果可能,应选择一个不易受到恶劣天气(如雷电)影响的地点,并为设备提供适当的防护措施,如防水罩。
- 基站设备安装:
稳定基座: 基准站设备需要安装在稳固的基座上,确保设备不会因为震动而影响定位精度。
水平校准: 在安装基站设备之前,进行水平校准以确保天线水平放置,以避免定位误差。
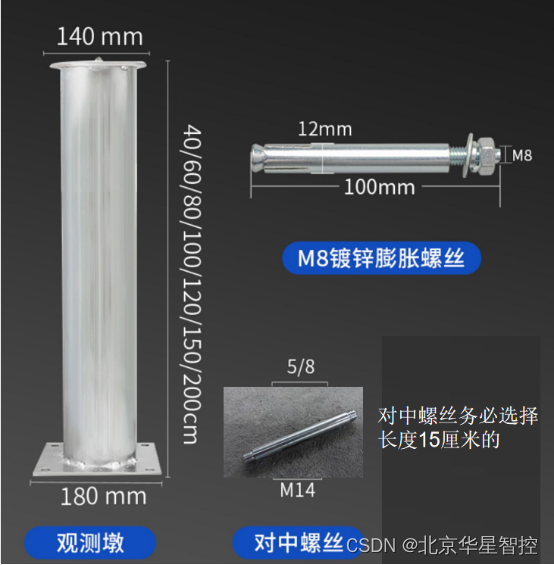
安全固定: 设备必须牢固地固定在基座上,以避免因风力或其他外力导致设备倾斜或移位。
- 数据通信和电源:
稳定电源: 提供稳定可靠的电源供应,以确保基站设备的正常运行。
现场安装照片









![[GPT-1]论文实现:Improving Language Understanding by Generative Pre-Training](https://img-blog.csdnimg.cn/direct/21324314bc49456c9bf1342508890f1f.png)