目录
前言
1.陀螺仪模型
2.滑模跟踪控制
3.PID控制
4.总结
前言
不为别的,这篇小文章只为内涵某人,问候一下他:不是有手就行,哈哈~
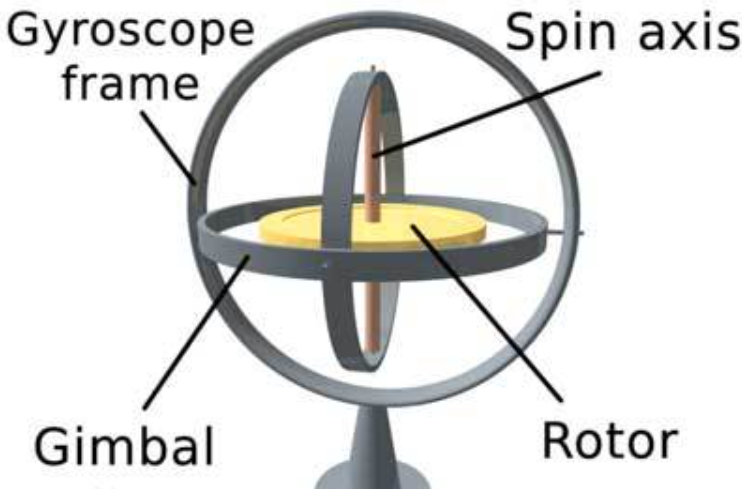
1.陀螺仪模型
2.滑模跟踪控制
对于2自由度陀螺仪有两个方向x、y跟踪,所以需要分别为两个方向单独设计滑模面,这里仍以简单的线性滑模面设计分析,有兴趣的读者可以查阅我的往期滑模文章专栏
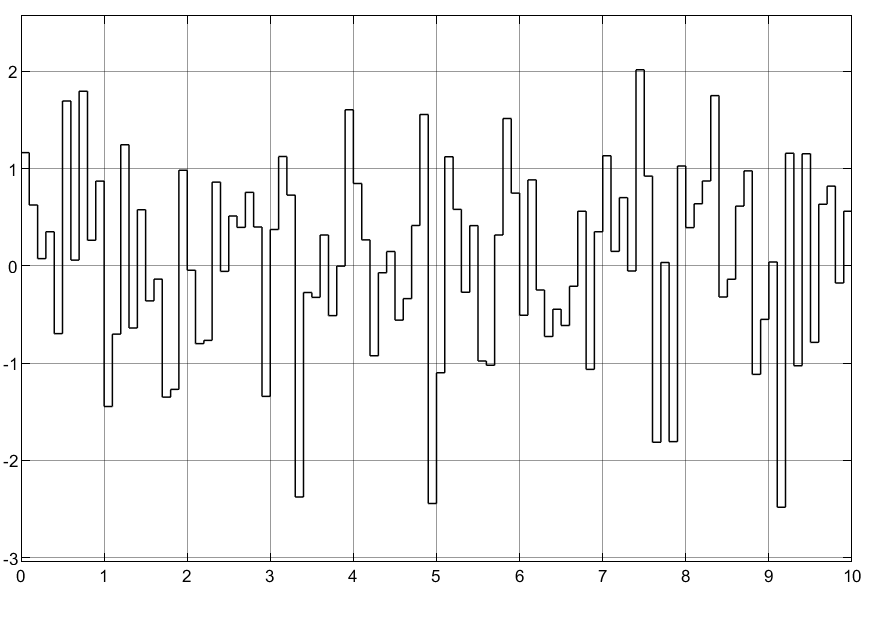
激励选取简单的白噪声:
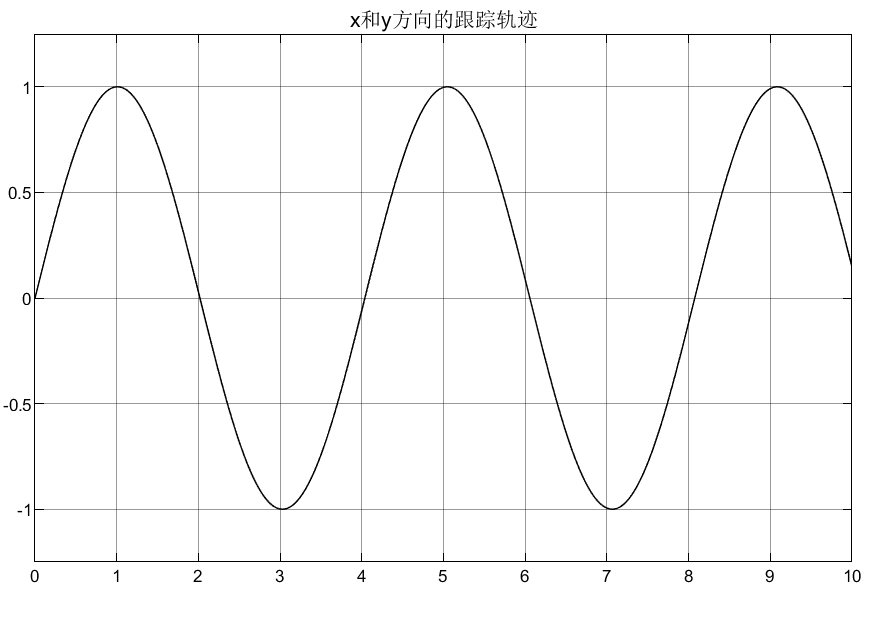
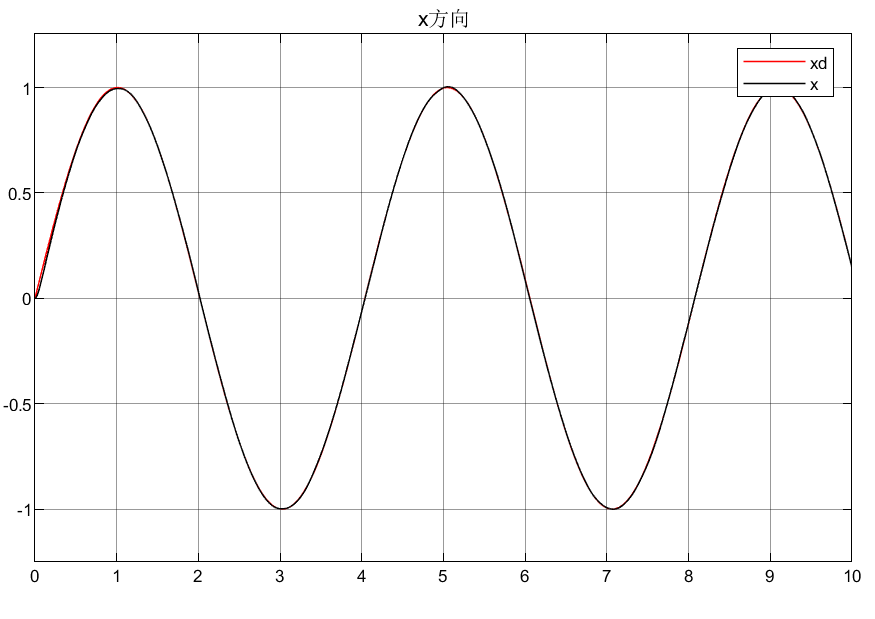
跟踪轨迹选取简单的正弦曲线:
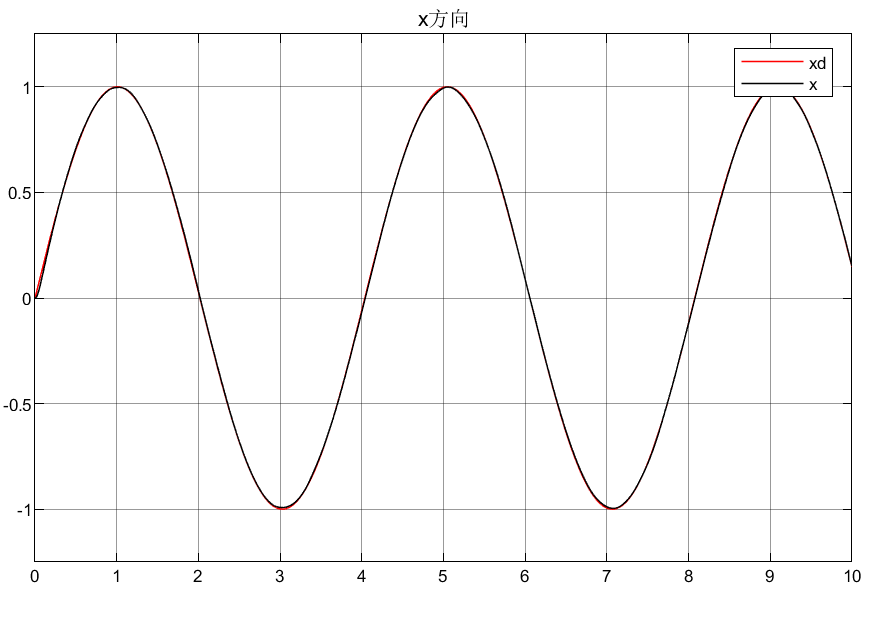
x方向位移跟踪效果:
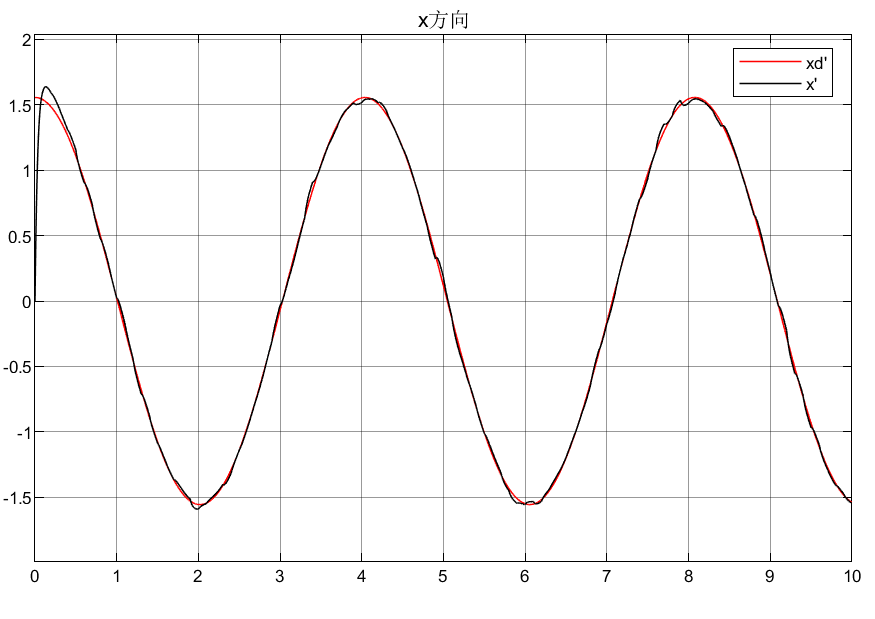
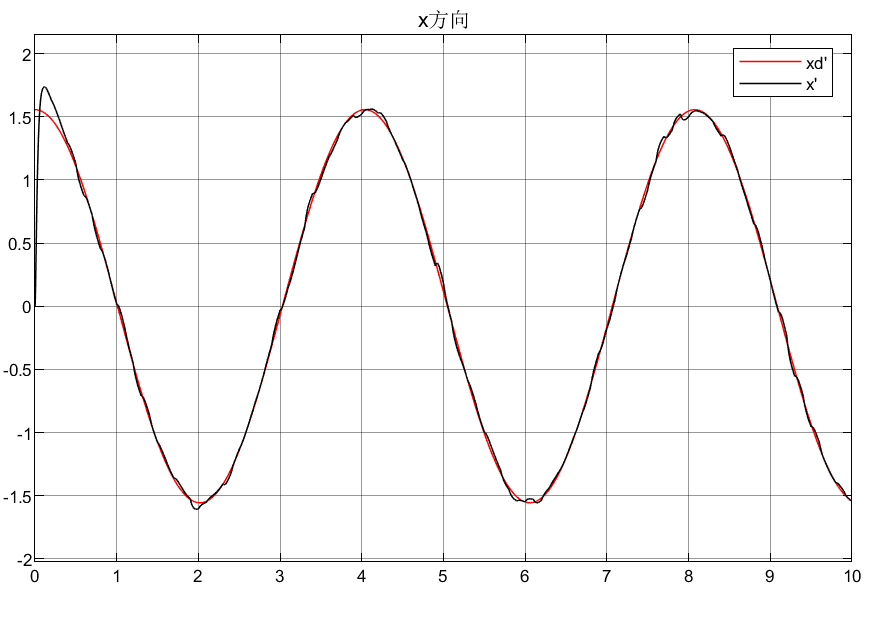
x方向速度跟踪效果:
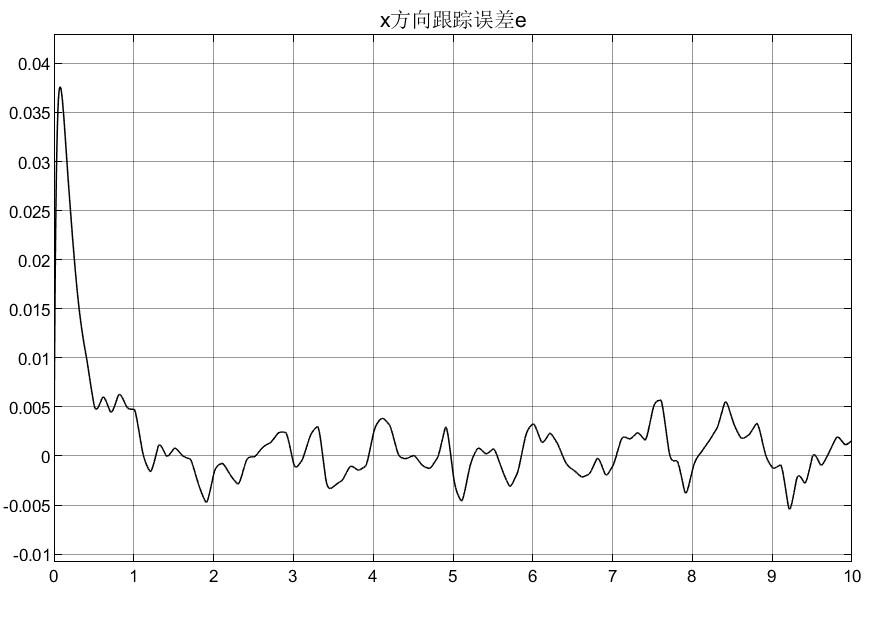
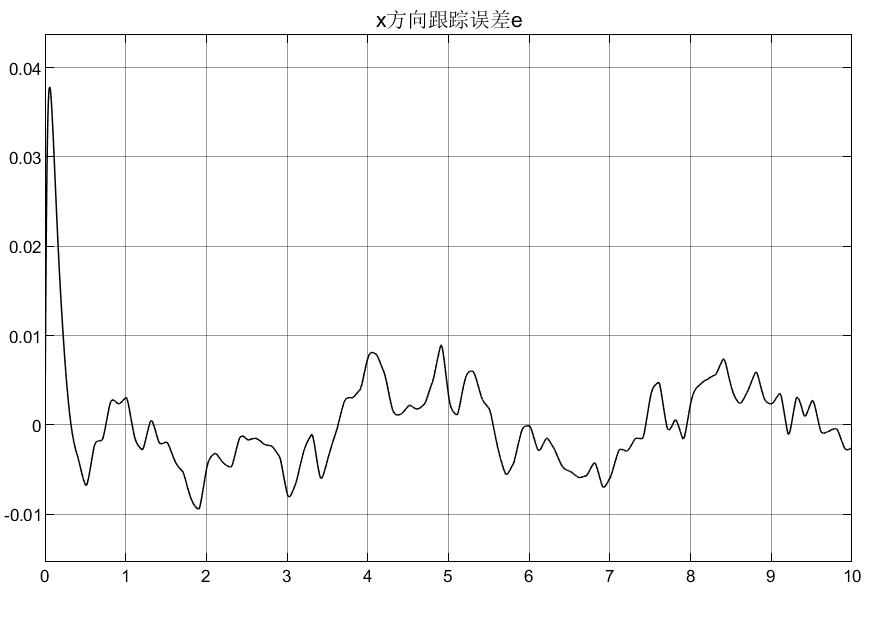
x方向跟踪误差:
由于x和y方向选取的跟踪轨迹、扰动相同,所以y方向跟踪效果和x方向一样,这里不再累赘展示。
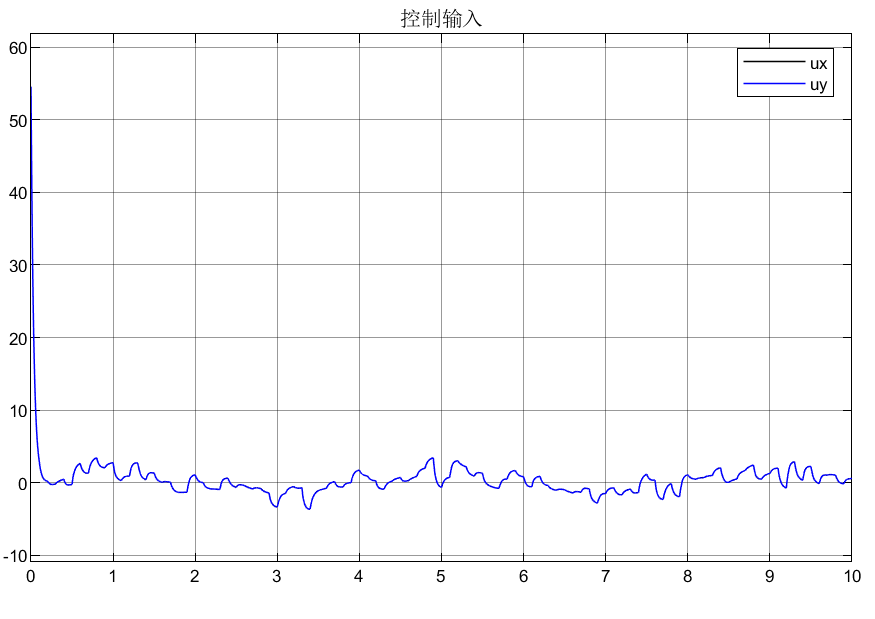
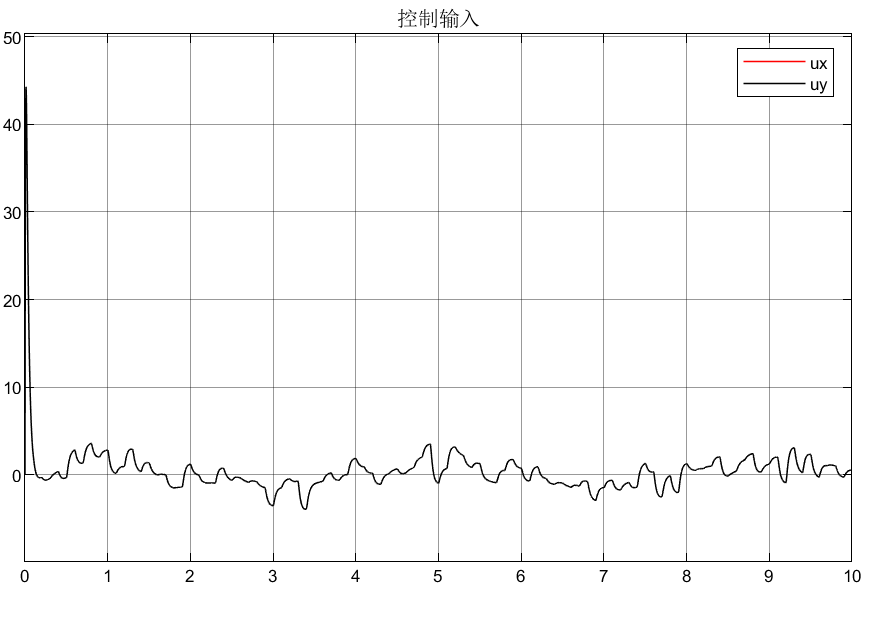
控制输入曲线:
3.PID控制
为了比对两者效果,同样扰动和跟踪曲线均选取与滑模控制相同,PID控制仿真结果如下:
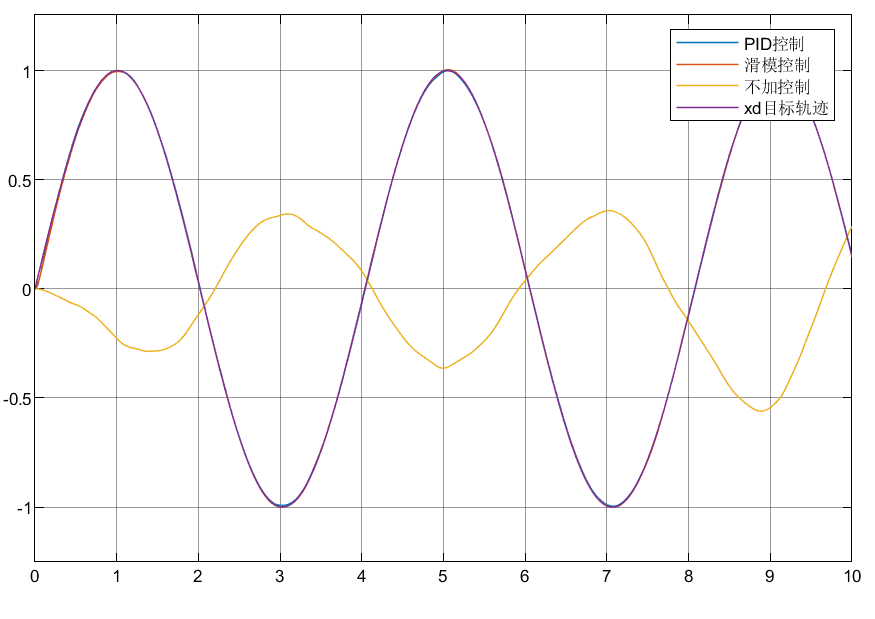
这里为了对比有、无控制、PID和滑模控制的效果,进行汇总x方向位移跟踪曲线,如下所示:
4.总结
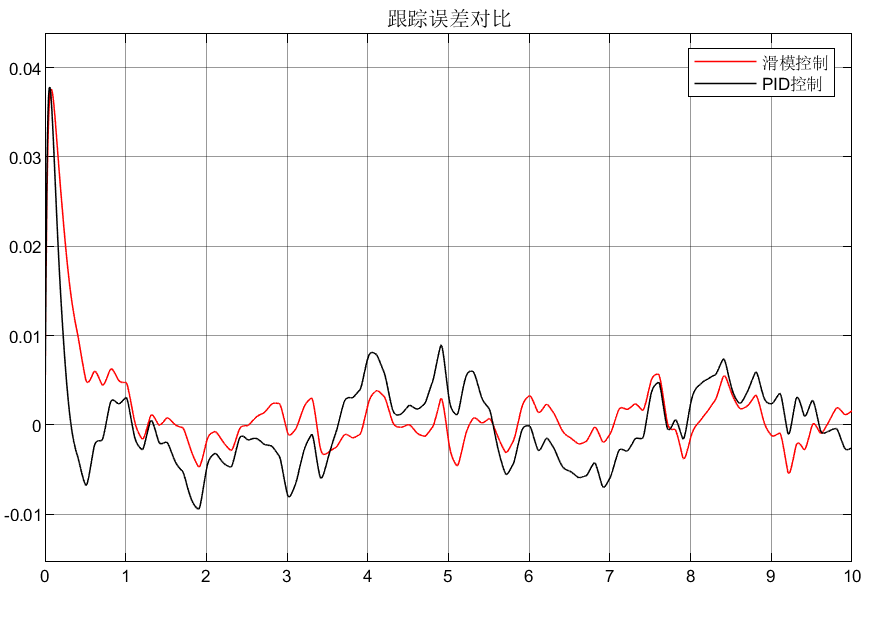
①可以看到PID控制和滑模控制均能跟踪目标轨迹,证实了PID参数调节和滑模控制设计的合理性;
②从PID和滑模控制跟踪效果上来看,滑模控制跟踪的误差更小,说明这里设计的滑模控制跟踪效果优于常规的PID控制。