文章目录
- 术语和定义
- 一般要求
- 功能要求
- 故障指示
- 性能要求
- 响应时间
- 图像时延
- 单视图视野范围
- 平面拼接视图视野
- 平面拼接效果
- 总体要求
- 行列畸变
- 拼接错位及拼接无效区域
- 试验方法
- 环境条件
- 仪器和设备
- 车辆条件
- 系统响应时间试验
- 图像时延试验
- 单视图视野范围试验
- 平面拼接视图视野试验
- 平面拼接效果试验
- 试验准备
- 视图采集
- 行列畸变评价
- 拼接错位和拼接无效区域评价
- 拼接错位计算
- 拼接无效区域及占比计算
术语和定义
1. 全景影像监测系统 —— AVMS(around view monitoring system) 向驾驶员提供车辆周围360°范围内环境的实时影像信息的系统。
2. 系统盲区 —— 因摄像头布置和车身结构限制等原因,系统无法监测到的车辆周边区域。
3. 单视图 —— 对某一路摄像头采集的图像进行单独显示的视图。单视图可分为前单视图、后单视图、左单视图、右单视图。
4. 平面拼接视图 —— 将各路摄像头采集的图像处理得到的一幅显示车辆周边环境信息的平面视图。
5. 拼接缝隙 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后产生的图像缝隙,如图所示。

6. 拼接错位 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像显示位置的偏移,如图所示。

7. 拼接重影 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像的叠加显示,如图所示。
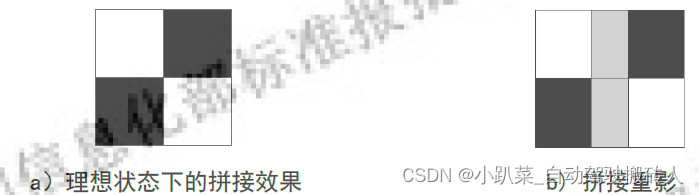
8. 拼接损失 —— 在平面拼接视图中,相邻摄像头采集的图像在拼接后图像的部分丢失,如图所示。

一般要求
功能要求
1. 车辆在启动状态下,应至少在进入倒车挡位时在显示屏中立即清晰地显示车辆周围环境的实时影像信息。
2. 系统应能输出平面拼接视图,且应满足以下要求:
2.1 M 类、N1类车辆的系统支持360°范围内视图拼接
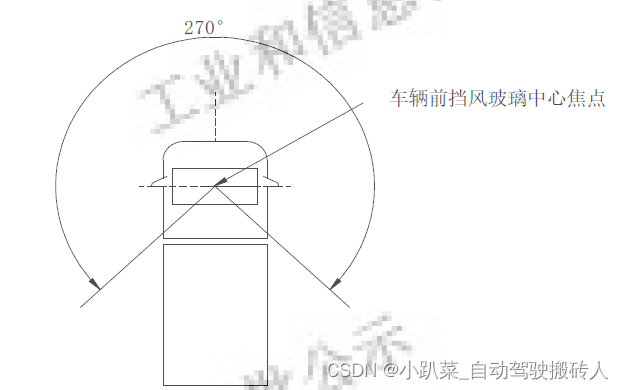
2.2 N2类、N3类车辆的系统至少支持如图所示的270°范围内视图拼接,且为新增摄像头留有接口,以补充后部视野显示。
3. 平面拼接视图中,车辆模型应车头竖直朝上布置,宜水平居中,不应出现明显的偏移或倾斜,垂直方向可有适当的偏移。
4. 系统应具备输出单视图的功能,并满足以下要求
4.1 类、N1类车辆显示前单视图、后单视图、左单视图和右单视图;
4.2 N2类、N3类车辆至少显示前单视图、左单视图和右单视图
故障指示
系统应至少以光学信号的方式提示驾驶员系统故障,该故障信号可与其他系统共用文字、图形或位置。
性能要求
响应时间
按下文方式进行试验,系统响应时间应不大于3s。
图像时延
按下文方式进行试验,系统输出的图像时延应不大于0.3s。
单视图视野范围
按下文方式进行试验,系统各单视图视野应满足以下要求:
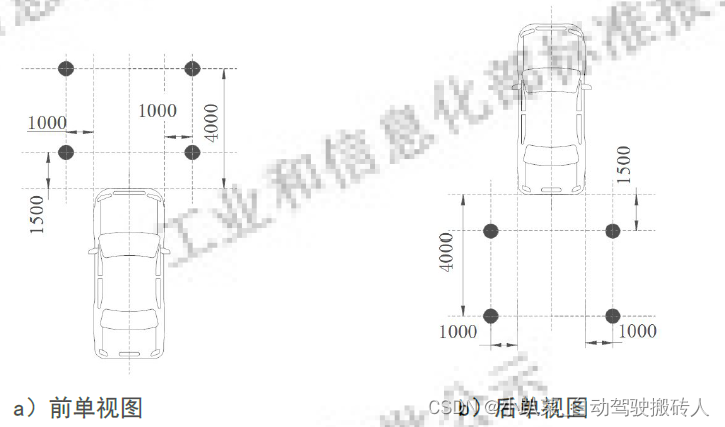
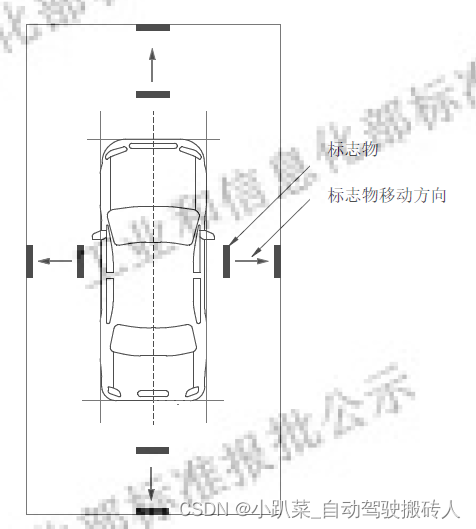
前、后单视图:完全观测到距离车身前后外边缘1500 mm 和4000 mm,离车身外侧1000 mm 处的全部标志物
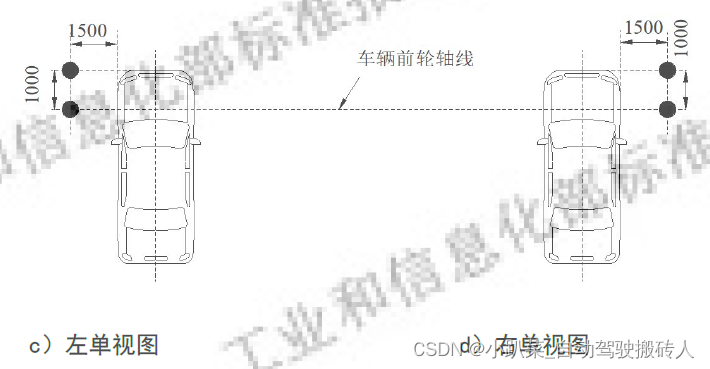
左、右单视图:完全观测到距离车身外相应侧1500 mm,前轮轴线上及距前轮轴线纵向距离1000 mm 处的全部标志物
平面拼接视图视野
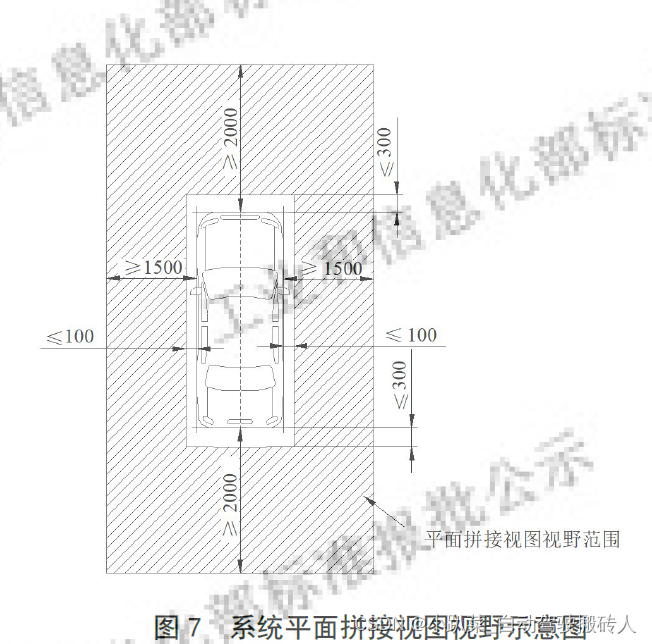
按下文方式进行试验,车辆中轴线上各方向的系统盲区应满足:
前、后侧分别距离车身前、后边缘的实际距离不大于300 mm;
左、右侧分别距离车身左、右边缘的实际距离不大于100 mm。
按下文方式进行试验,车辆中轴线上各方向的最远视野应满足:
前、后侧分别距离车身前、后边缘的实际距离不小于2000 mm;
左、右侧分别距离车身左、右边缘的实际距离不小于1500 mm。
平面拼接效果
总体要求
平面拼接视图中不应出现拼接缝隙,且拼接效果应至少满足下文中的《行/列畸变》或《拼接错位及拼接无效区域》任意一个。
行列畸变
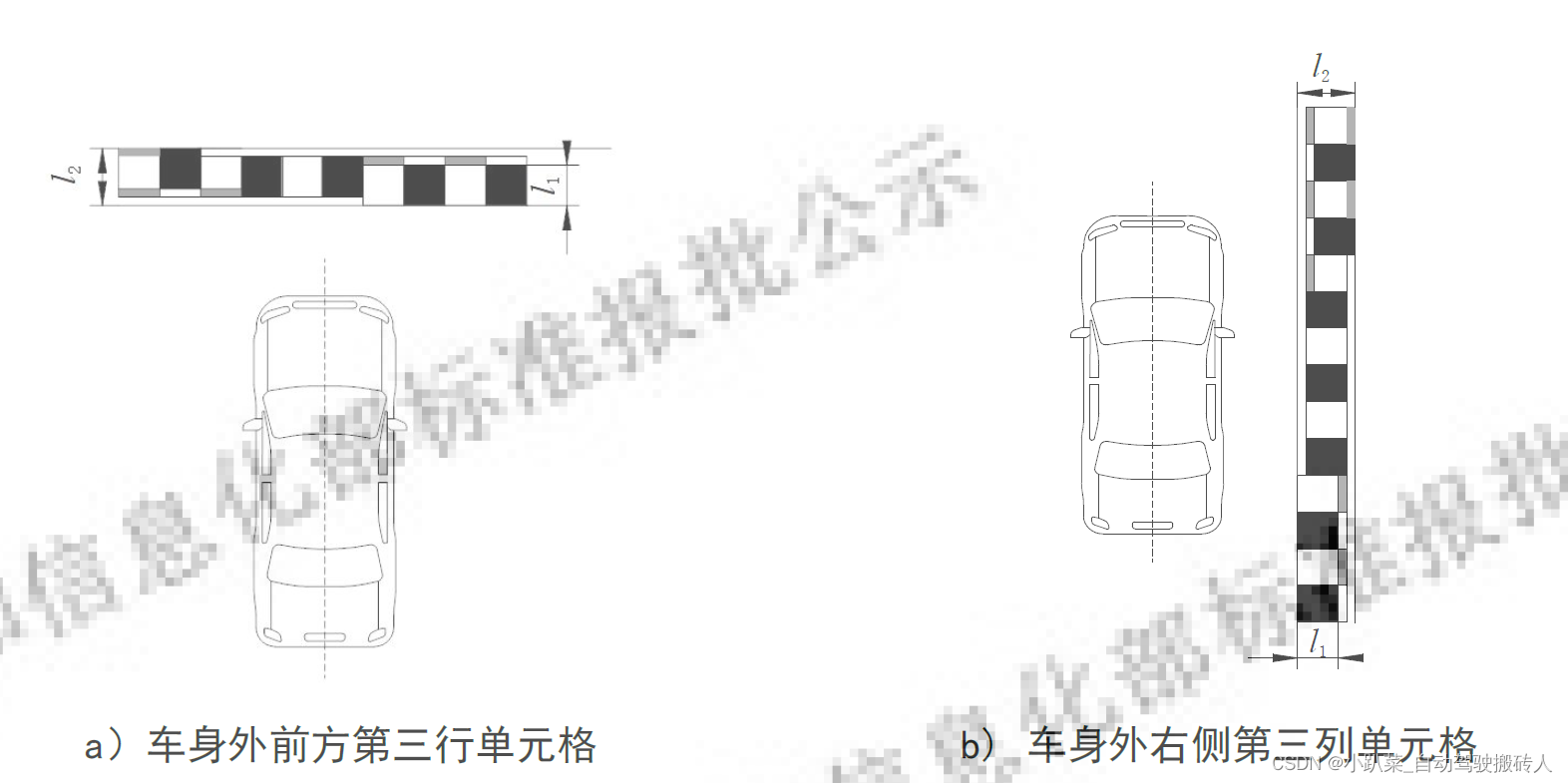
按下文的进行试验,平面拼接视图中,位于车身外第三行/列单元格的累计宽度应不大于视图中棋盘格单元格边长的1.5倍,即如图8所示,平面拼接视图应满足l2不大于1.5倍的l1。
说明:
l1 —— 棋盘格图卡单元格在图像上的边长,单位为毫米(mm)
l2 —— 第三行/列单元格距离车身相应侧外边缘的最远点与最近点的距离,单位为毫米(mm)。
拼接错位及拼接无效区域
按照下文方式进行试验,M1类车辆平面拼接视图的各拼接错位对应的实际距离应不大于0.15 m,其他类车辆平面拼接视图的各拼接错位对应的实际距离应不大于0.3 m。
在平面拼接视图中拼接重影和拼接损失产生的面积视为拼接无效区域,按下文方式进行试验,平面拼接视图中拼接无效区域对应实际面积应不大于《平面拼接视图视野》中要求的系统拼接视图视野的3%,任意田字格排布的四个单元格的拼接无效区域对应实际面积应不大于0.15 m2。
试验方法
环境条件
试验应按下列环境条件进行:
1. 试验场地为干燥平坦的沥青或混凝土路面;
2. 试验环境温度范围为-20℃~+45℃之间;
3. 水平能见度不小于1 km;
4. 试验区域内环境照明均匀分布,且覆盖系统的拼接视野范围,照度不低于800 lux,不高于100000 lux。
仪器和设备
试验用测量仪器及设备应满足以下要求:
1. 试验用计时器精度至少为0.01 s;
2. 单视图视野范围试验所用标志物为高度0.8 m,直径0.3 m 的圆柱体;
3. 平面拼接视图视野试验所用标志物为宽度为15 mm~20 mm、长度为500 mm 的平面标志物;
4. 平面拼接效果试验用棋盘格图卡单元格边长为300 mm;
5. 图像采集设备分辨率不小于系统有效显示区域的分辨率。
车辆条件
应在试验车辆整车整备质量加上驾驶员和试验设备的总质量的状态下进行试验,驾驶员和试验设备的总质量不超过150 kg,试验开始后不应对车辆载荷进行任何调整。对于装备了可调空气悬架等影响车辆高度的部件的车辆,应将相关部件调整至车辆制造商设定的出厂状态。
系统响应时间试验
车辆处于闭锁状态,并确保所有电子系统均已停用,或保证车辆闭锁至少30 min。测试人员解锁车辆,该时间点记为t0,测试人员进入车内,系上安全带,启动车辆,进入倒车挡位,该时间点记为t1,t0至t1 应控制在12s~15s内。系统输出实时影像信息时间点记为t1,单次试验中系统响应时间为t2与t1的差值。重复上述试验三次,系统响应时间t取三次试验平均值。
图像时延试验
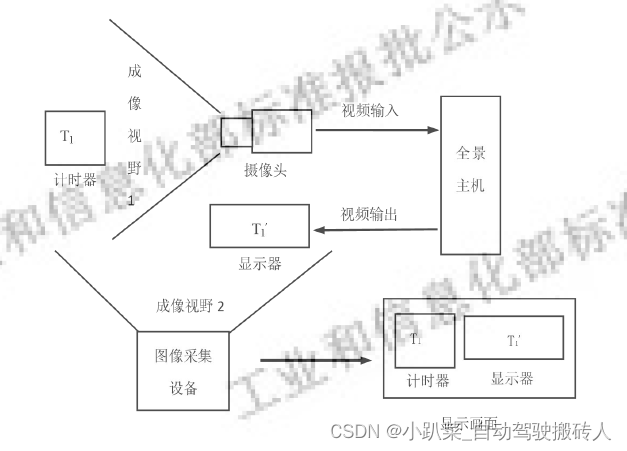
试验布置见下图,试验步骤如下:
1. 开启系统,使其处于正常工作状态,显示屏正常成像;
2. 计时器置于系统视野范围内,并确保显示屏的成像画面中能清晰识别出计时器中的数字;
3. 将图像采集设备的成像视野对准计时器和显示屏,确保图像采集设备显示画面能清晰的识别出计时器和显示屏的数字;
4. 开启计时器计时,识别某一时刻计时器时间T1 和显示屏时间T1’,单次试验中图像时延为T1与T1’的差值。
5. 重复上述试验三次,该单视图下的图像时延T 取三次试验的平均值。
6. 分别在不同的单视图下重复上述试验。
单视图视野范围试验
开启系统,调整方向盘转角至0 °。将单视图切换至前单视图画面,分别在《性能要求》章节所定义相应位置放置圆柱体标志物,观察前单视图画面中该标志物是否完全显示。
将单视图切换至后单视图、左单视图和右单视图,分别在《性能要求》章节所定义相应位置放置圆柱体标志物,观察后单视图、左单视图和右单视图该标志物是否完全显示。
平面拼接视图视野试验
开启系统,调整方向盘转角至0 °,在被测车辆中轴线正前方外缘,垂直于试验车辆纵轴,水平放置平面标志物,如下图所示。在车辆前进方向移动标志物,直至标志物在平面拼接视图中完全显示,测量出此时标志物到车身前端外缘的最短距离。继续移动标志物,直至标志物在平面拼接视图中完全消失,测量出此时标志物到车身前端外缘的最短距离。
分别在车辆左侧中心外缘、右侧中心外缘平行于试验车辆纵轴水平放置标志物,后方中心外缘垂直于试验车辆纵轴水平放置标志物,按照如下图所示方向移动标志物,测量出标志物完全显示点和完全消失点距离车身对应侧外缘的最短距离。
平面拼接效果试验
试验准备
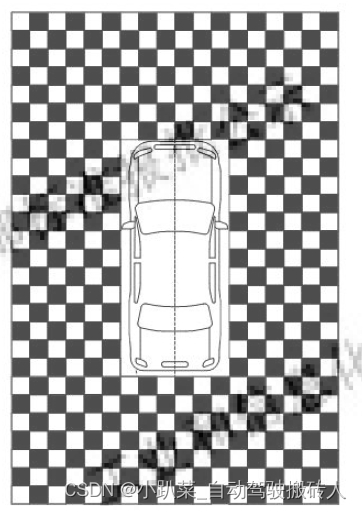
在被测车辆的四周放置棋盘格图卡,如下图所示。黑白单元格间隔布置,棋盘格应至少覆盖被测车辆前方及后方外2000 mm、左右外边缘外1500 mm区域,对于仅支持270 °范围视图拼接的N2、N3类车辆,后方无影像信息的区域可不铺设棋盘格。尽可能保证测试车辆居中摆放,误差在100 mm范围内,且单边间隙小于300 mm。棋盘格图卡的单元格边界线应与车辆轴线平行或垂直,误差不应大于5 °。
视图采集
开启系统,调整方向盘转角至0 °,采集系统显示端的平面拼接视图图像。图像采集设备的拍摄方向应平行于显示端法线,采集的平面拼接视图图像应无过曝、过暗、不清晰等明显缺陷。在采集的平面拼接视图中,分析系统在车身外边缘外前后2000 mm、左右外边缘外1500 mm范围内的视图拼接效果。
行列畸变评价
在采集的平面拼接视图中,分别测量车身前方外缘、后侧外缘第三行,左侧外缘、右侧外缘外第三列棋盘格中的l1和l2。
拼接错位和拼接无效区域评价
拼接错位计算
识别视图分析范围内存在的拼接错位,通过公式(1)计算单个拼接错位对应的实际长
度。

式中:
Ldi —— 拼接视图中某单个拼接错位的实际长度,单位为米(m);
lf —— 棋盘格图卡单元格的边长,单位为米(m);
Δxi —— 拼接视图中某单个拼接错位x方向的错位量,单位为毫米(mm);
Δyi —— 拼接视图中某单个拼接错位y方向的错位量,单位为毫米(mm);
l1 —— 棋盘格图卡单元格在图像上的边长,单位为毫米(mm)。
拼接无效区域及占比计算
识别视图在分析范围内存在拼接无效区域,分别计算任意田字格排布的单元格拼接的无效区域的实际面积和总拼接无效区域占比。单元格无效区域的边界按照以下步骤选择:
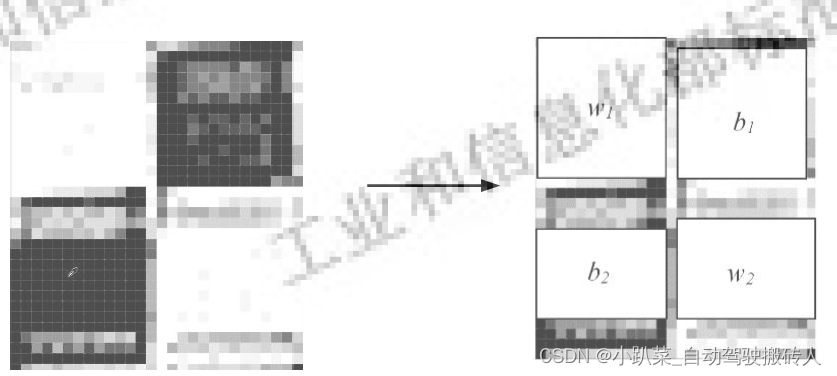
1. 针对采集到的图片中某一个单元格,预先选择出其有效区域的边界,取边界包拢区域内灰度均值,黑色单元格灰度均值记为Lbi、白色单元格灰度均值记为Lwi;预选的区域的边界应连续,与原棋盘格颜色相近。本步骤预选的有效区域可由测试机构和生产厂商共同确定;
2. 黑色单元格位置中灰度小于Lbi 的像素点,其灰度置为0;白色单元格位置中灰度大于Lwi 的像素点,其灰度置为255,如图所示;

3. 图像(数据)二值化处理后,选取合理的规则矩形作为单元格的有效区域。最终得到的黑色单元格有效区域内(下图中区域b1、b2),灰度为0 的像素点所占比例应不小于50%,其边界上灰度为0 的像素占所在行或列的比例宜大于70%。最终得到的白色单元格有效区域内(下图中区域w1、w2),灰度为255 的像素点所占比例应不小于50%,其边界上灰度为255 的像素占所在行或列的比例宜大于70%;
4. 每个单元格(理论面积)中除去有效区域外的其他面积得到该单元格的拼接无效区域。拼接无效区域占比通过公式(2)计算:

式中:
Nv —— 拼接视图中拼接无效区域占比;
Svi —— 拼接视图中单元格的拼接无效区域面积,单位为平方毫米(mm²);
S —— 拼接视图中减去车辆模型及周边无影像区域的拼接区域面积,单位为平方毫米(mm²)。对于无后单视图的N2类、N3类车辆,还应减去无影像信息的部分。