1.系统设计
本次设计围绕基于PLC的采摘机械手系统进行设计, PLC即可编程控制器其是一种常见的微处理器,本次拟采用西门子是S7-200 PLC,一方面对整个设计从器件选型到I/O分配,图纸绘制等进行设计,另一方面还通过组态王仿真软件进行仿真验证。通过仿真测试,本次设计的采摘采摘机械手在步进电机驱动下可以完成对采摘机械手在搬运过程中的下降、夹紧、上升、右旋、下降等全过程自动化控制,对后来学者具有一定的参考意义。
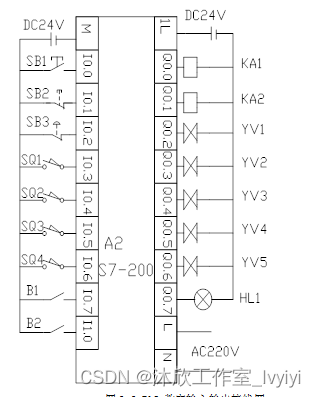
2.PLC接线图
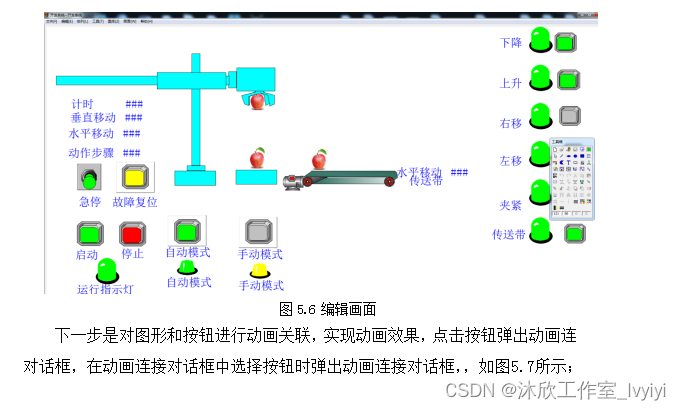
3.组态王仿真
1.系统设计
本次设计围绕基于PLC的采摘机械手系统进行设计, PLC即可编程控制器其是一种常见的微处理器,本次拟采用西门子是S7-200 PLC,一方面对整个设计从器件选型到I/O分配,图纸绘制等进行设计,另一方面还通过组态王仿真软件进行仿真验证。通过仿真测试,本次设计的采摘采摘机械手在步进电机驱动下可以完成对采摘机械手在搬运过程中的下降、夹紧、上升、右旋、下降等全过程自动化控制,对后来学者具有一定的参考意义。
2.PLC接线图
3.组态王仿真
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1277601.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!