一、初级像差理论
1.1厚透镜初级像差
由于结构和机械强度的需要,任何光学透镜都具有一定厚度。对于正透镜其边缘厚度一般不应小于3mm;对于负透镜,中心厚度不应小于透镜孔径1/10~1/15,以防止安装和固定变形。
除此之外透镜的厚度还有功能:(1)透镜厚度作为光学结构参数的变量,其变化可以使透镜的焦距发生变化等(2)透镜厚度作为校正像差的变量,通过厚度的变化可以校正光学系统的像差,在双高斯型照相物镜中,是利用两块近乎对称的厚透镜来校正像差。
1.2薄透镜初级像差
如果一个透镜组的厚度与其焦距比较可以忽略,这样的透镜组被称为薄透镜组。
1.3像差校正与平衡
选择初始结构后,利用计算机进行光路计算,求出全部像差,并画出各种像差曲线。从像差曲线上可以分析得到主要是哪些像差影响光学系统的成像质量,从而找到改进方法,进行像差校正。
一般高级像差是无法校正,只能降低到允许的范围内,然后改变初级像差符号和数量,把初级像差和高级像差降到最小,使系统实现尽可能好的成像质量。
有些情况某一像差无法校正,需要用其他像差来补偿,即像差平衡。像差平衡时,不需要将所有像差都校正到最小,关键是各种像差的平衡:轴上点与轴外点的平衡、各个视场间像差的平衡、各种像差的正负号平衡,这样才能使所有像差对一个统一像面达到最小,整个系统具有最佳成像质量。
二、像差及校正
实际上光学系统的成像是不完善的,光线经过光学系统各表面传输会形成多种像差,使成像产生模糊、变形等缺陷。像差就是光学系统成像不完善程度的描述。
常见的初级像差有球差、慧差、像散、场曲、畸变5种单色像差以及位置色差和倍率色差2种色差。
2.1球差
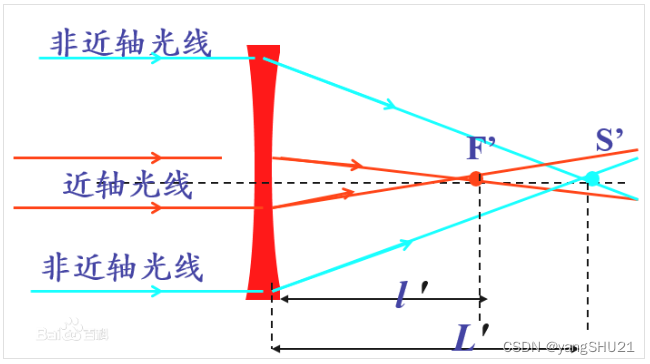
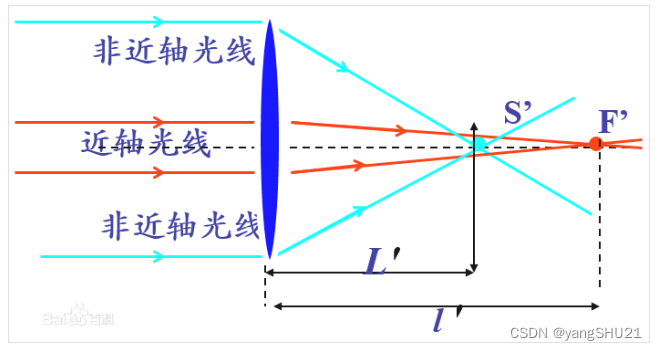
球差也叫球面像差,是指轴上物点发出的光束通过球面透镜时,透镜不同孔径区域的光束最后汇集在光轴的不同位置,在像面上形成圆形弥散,
2.2球差产生的原因
不同孔径角U的光线交光轴于不同点上,相对于理想象点的位置有不同的偏离。
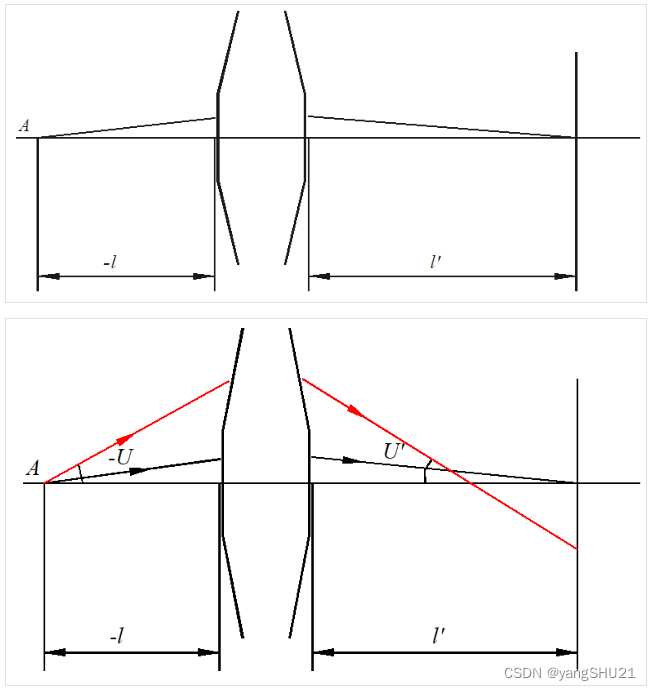
球差是轴上点唯一的单色相差
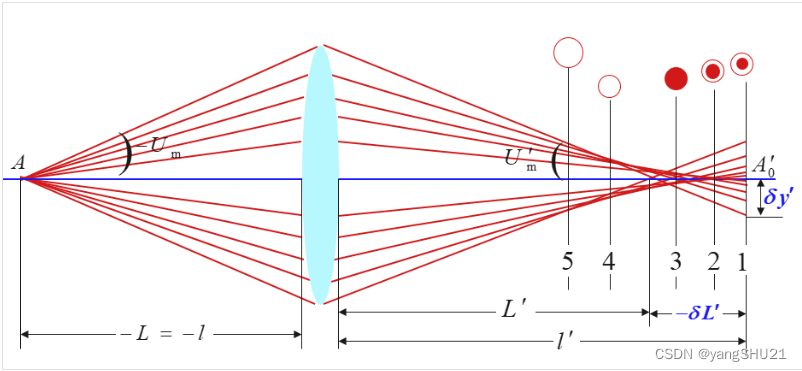
2.3球差的度量
光束在高斯像面上并不是汇聚于一个像点,而是一个圆形的弥散斑
轴上球差:δL'=L'-l'
垂轴球差:δy'=δL' *tanU'
δL'符号规则:是从理想像点计算到到实际光线交点
正球差(dL>0):
负球差(dL<0):
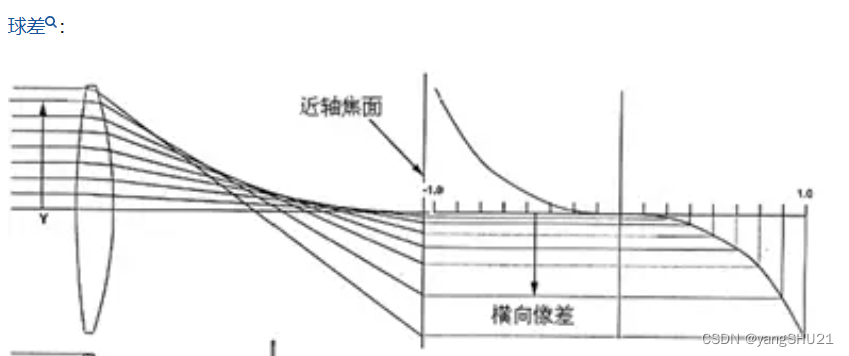
2.4球差曲线
对应最大孔径角Umax入射光线的高度hmax被称为全孔径(边光球差)
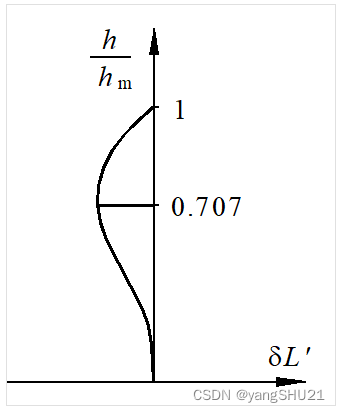
若h/hmax=0.7,则称为0.7孔径或0.7带光(带光球差)
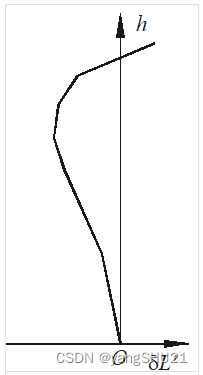
球差校正不足产生的曲线

球差过校正曲线
2.5球差的影响
整个孔径光束的垂轴球差在像面上形成了一个对称于光轴的圆形弥散斑,严重时使轴上点成像变得模糊不清。
球差_百度百科 (baidu.com)
2.6zemax中的球差描述
设计一个简单的单透镜来介绍球差在zemax软件中的描述方法
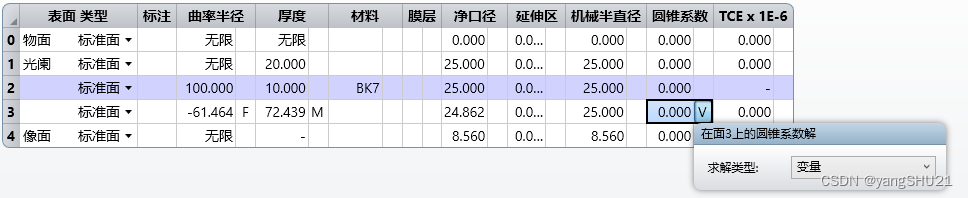
步骤一:在“镜头数据”编辑器中输入参数。
在“像面”前插入2个面并将面1(光阑面)厚度设置为20;将面2的曲率半径设置为100,厚度设置为10、材料设置为BK7

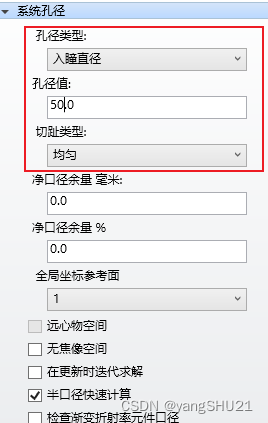
步骤二:设置入瞳直径大小为50mm
步骤三:在透镜后表面的曲率半径上设置F/#解为1.5(f=D*F/#,所以焦距为75mm)

步骤四:在像面前的“厚度”栏中设置边缘光线高度解
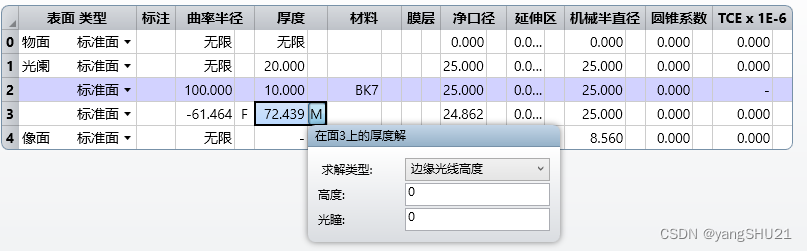
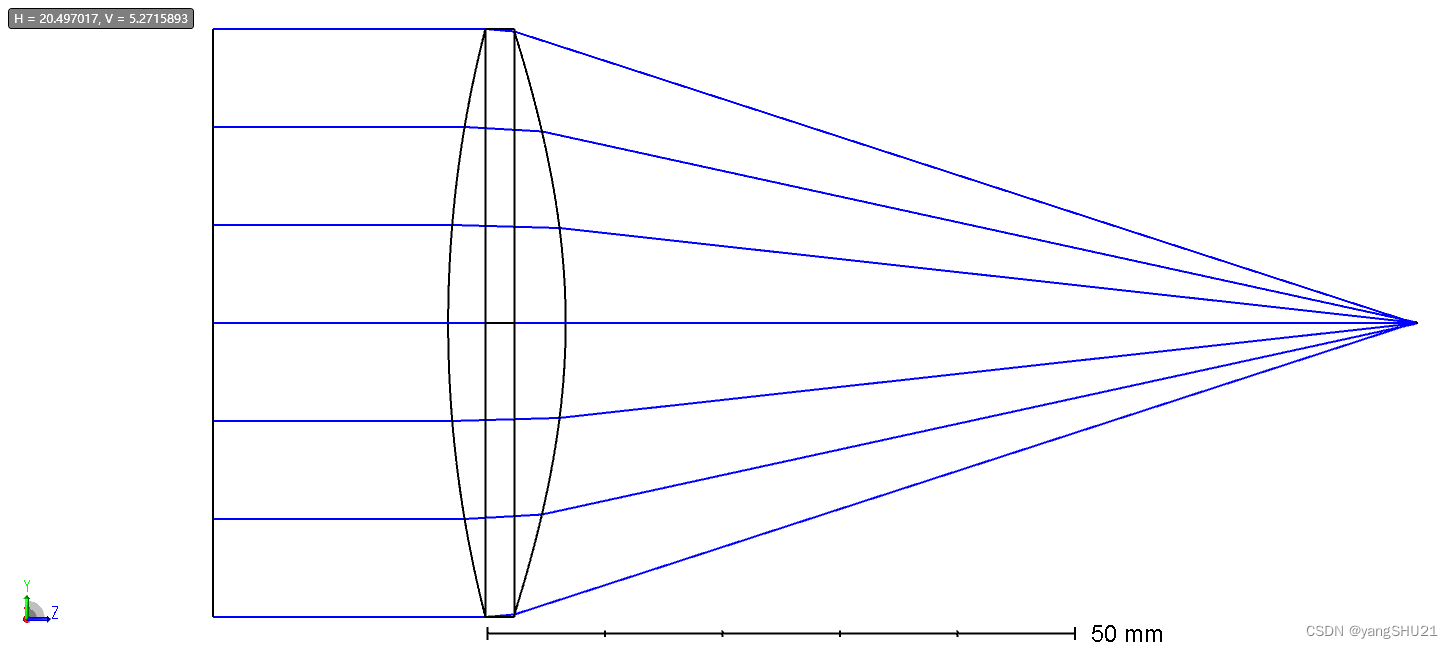
步骤五:完成简单的单透镜系统
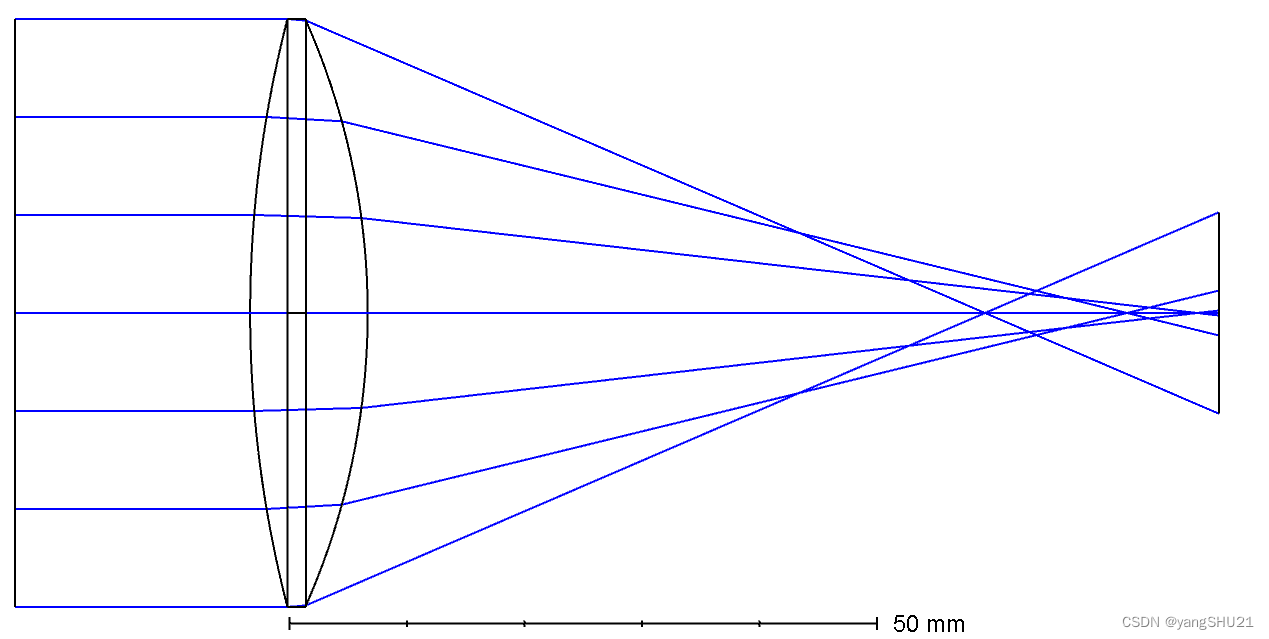
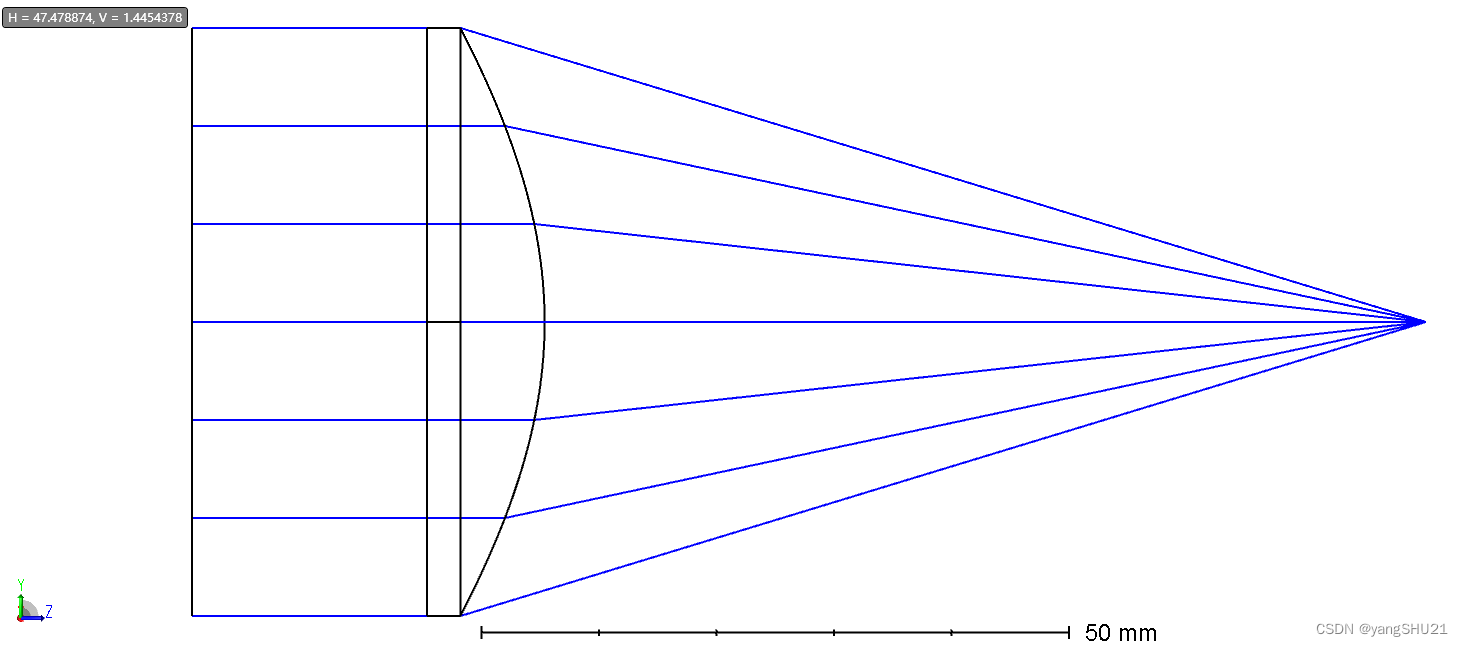
打开3D视图,可以看到不同的孔径区域光线的聚焦位置不同
将光线数设置为2

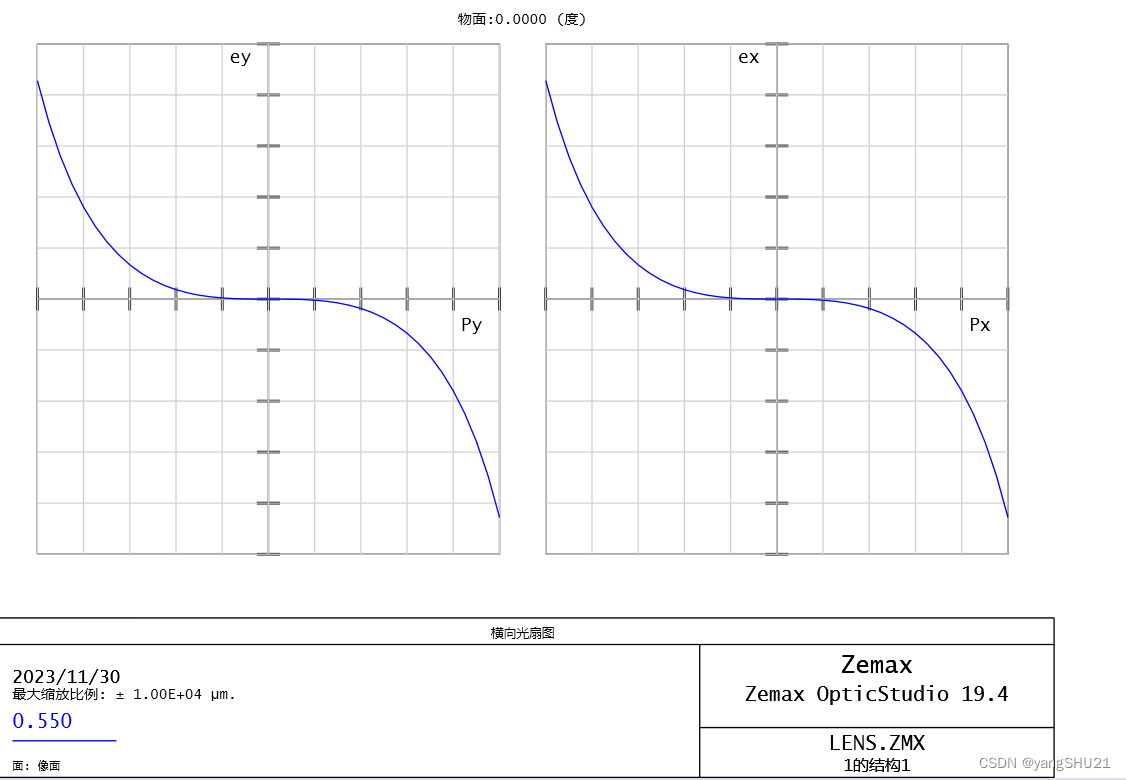
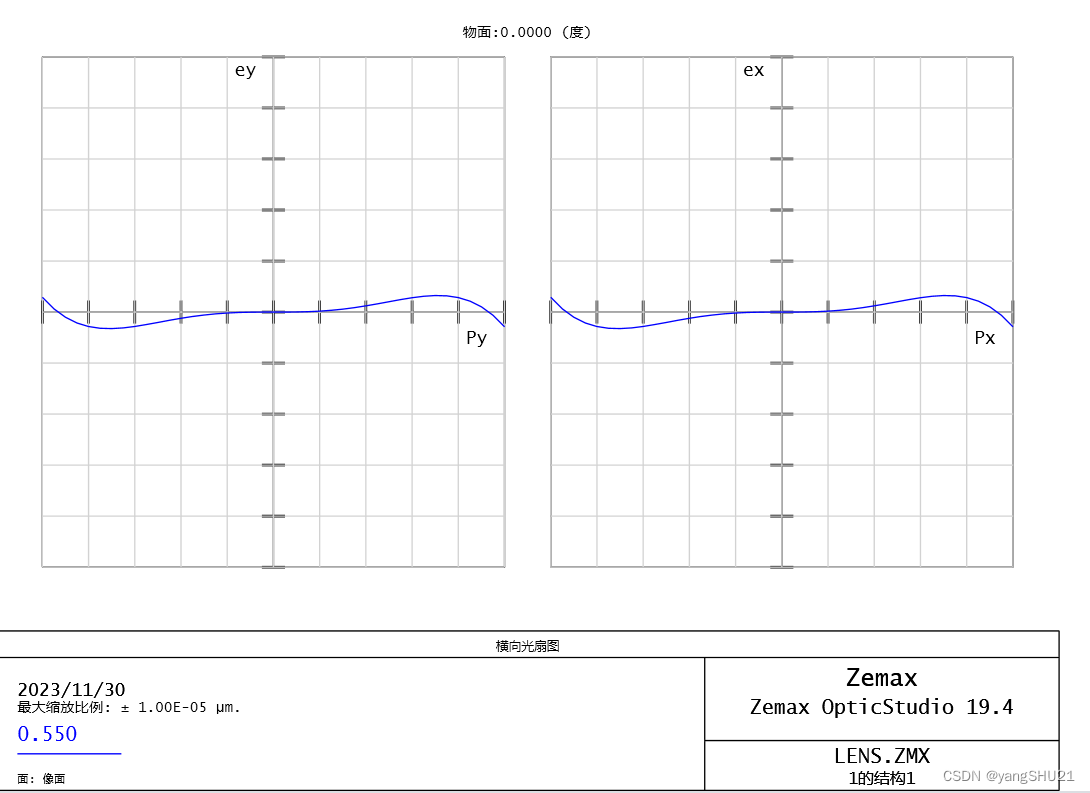
2.7球差在Zemax中的表示
(1)在zemax的光线光扇图(光线像差图)中可以定量分析不同孔径的球差大小。 它描述的是在不同光瞳位置处光线的像面高度与主光线高度的差值
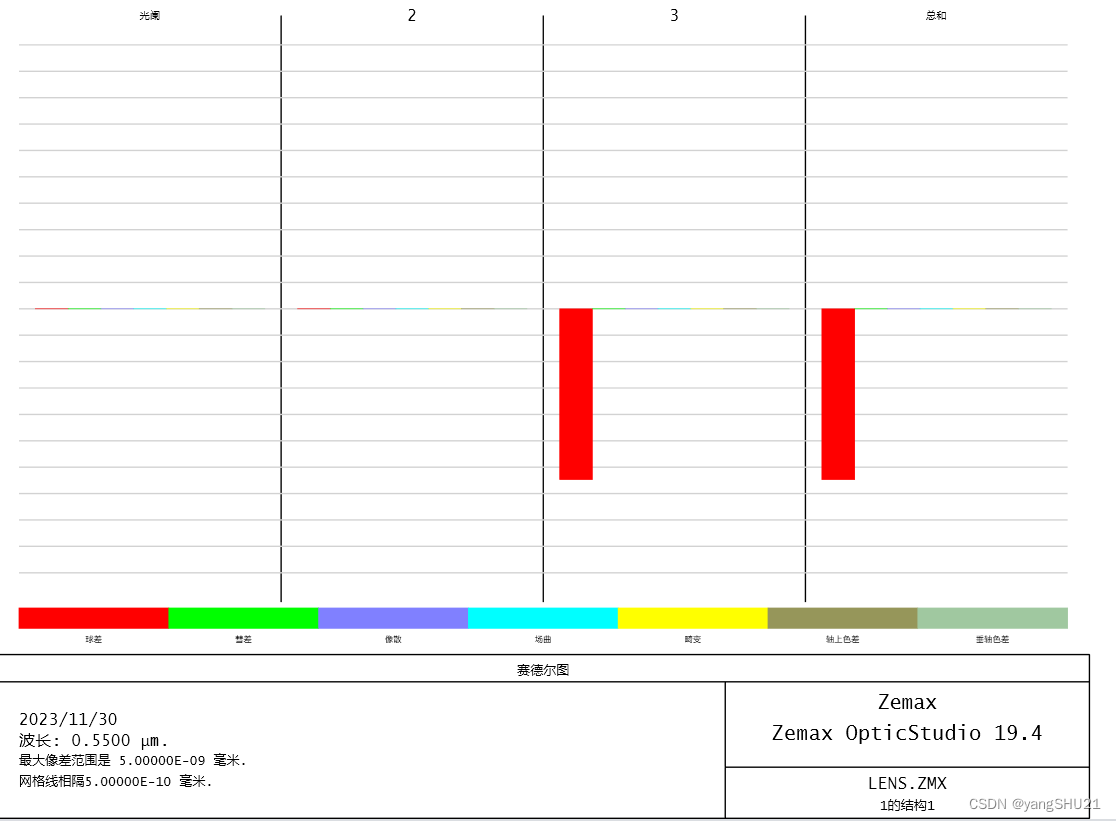
2.8球差定量分析
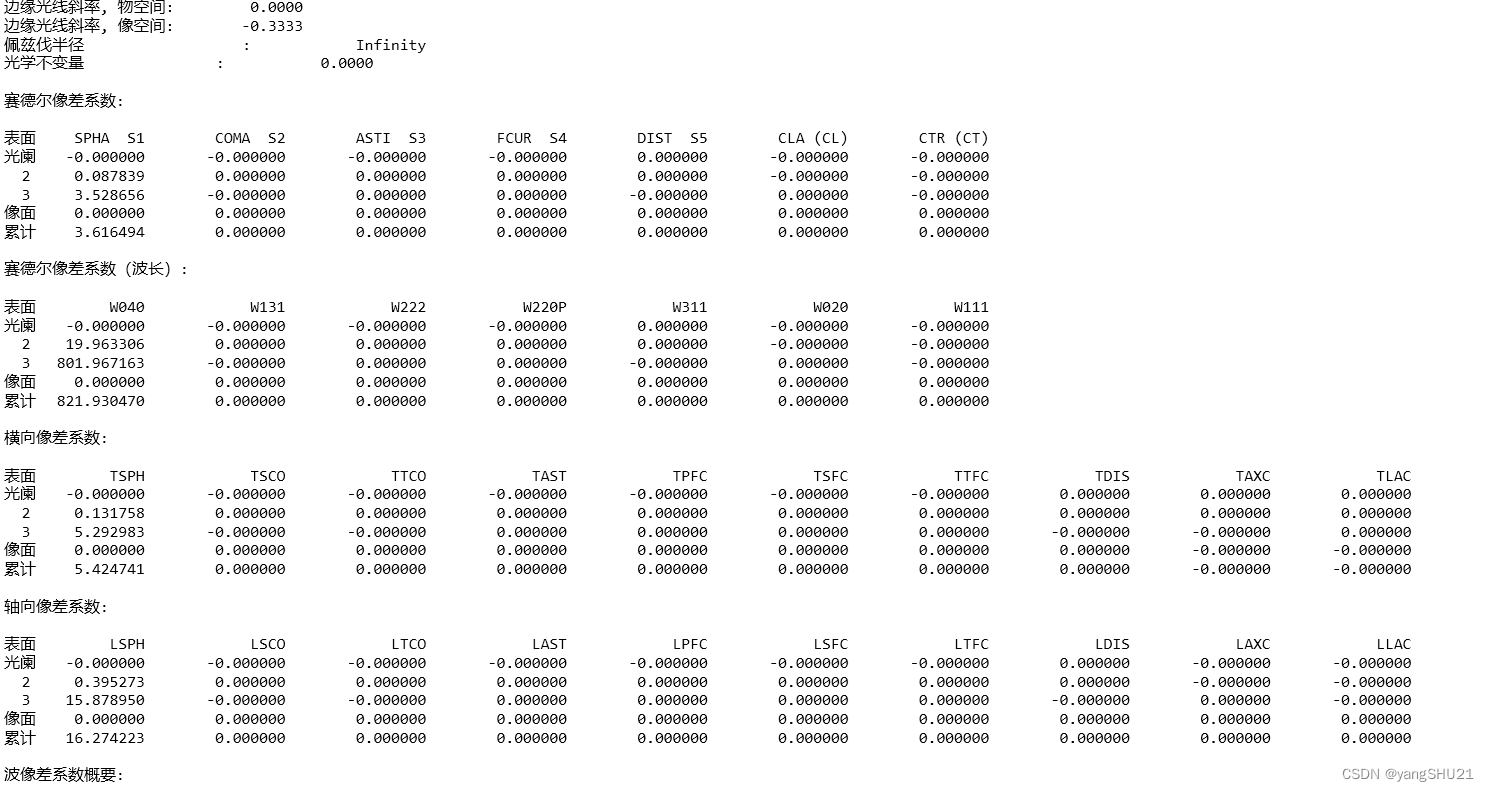
使用zemax提供的赛德尔像差统计功能可以查看球差数据,打开“赛德尔系数”命令
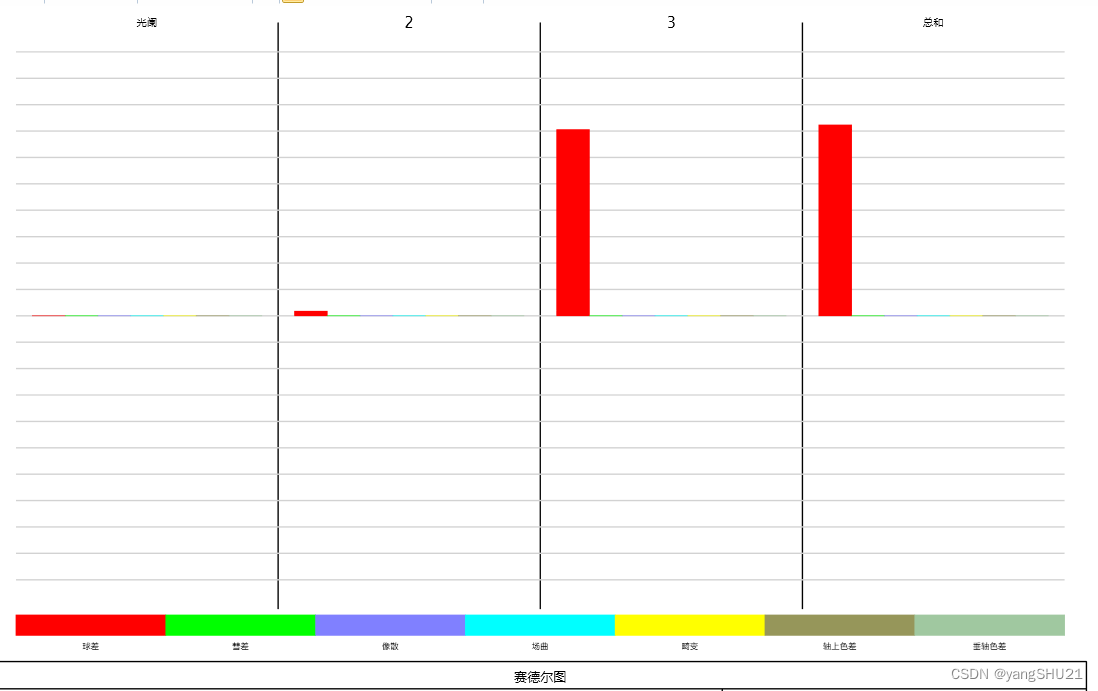
赛德尔图
2.9球差的校正方法
实际应用中主要使用两种方法校正球差:凹凸透镜补偿法和非球面校正球差。由于凸面(提供正的光焦度)始终提供正的球差,凹面始终提供负的球差,因此双凸单透镜不能消除球差。
采用增加透镜的方法,通过增加凹凸面从而减小球差。另外在不能增加透镜的情况下,常使用二次曲面来消除球差
步骤一:将面3的圆锥系数设置为变量
步骤二:利用优先向导进行优化设置
打开“评价函数编辑器”,设置”成像质量“为点列图,X,Y权重均为0,“光瞳采样”组下选择“高斯求积,并将环设置为4,点击应用。

步骤三:查看优化结果
单击”执行优化“按钮,开始执行优化操作
发现优化后光线聚焦在一点上
继续将面2上的曲率半径设置为变量,继续执行上述优化操作,优化后光线完全聚焦在一点,球差完全消除
最终的镜头数据如下: